用于多重影像系统的pet主机及其安装方法
技术领域
1.本发明涉及医疗设备领域,尤其涉及一种多重影像系统pet主机及其安装方法。
背景技术:
2.petct系统被广泛地应用到日常人体健康检查以及疾病诊断中。其中,pet是一种无创伤地显示人体器官功能和代谢的成像技术,能够用于早期肿瘤等疾病的诊断;ct是利用x线束对人体进行扫描,从而提供人体器官组织显像。petct系统是由pet提供病灶的详尽信息,由ct提供病灶的精确解剖定位,显著提高诊断的准确性。
3.目前,pet由pet主机和导轨系统组成,参见cn201410388361.8,其导轨系统包括主导轨和维护导轨,主导轨有时也被称为主支撑(文献中称为主支撑调节单元),在通常状态下,pet主机支撑于主导轨或者主支撑上。当ct的核心部件滑环需要维修或者维护的时候,需要将pet拉出来,这时将维护导轨连接于主导轨或者主支撑,然后将pet主机沿导轨系统拉出;结束维护后,将pet沿导轨系统复位。
4.文献cn201320080820.7也介绍了一种带有导轨装置的影像设备,包括直线主导轨、直线维修导轨和滑块。影像设备需要维护时,将维修导轨连接于主导轨,pet随滑块从主导轨滑行到维修导轨,达到维护所需的操作距离。维护结束后,pet反向滑行至工作位置,定位后拆卸维修导轨。
5.现有设计在带来如上益处的同时,也带来了一定的弊端。为了要保证主导轨和维护导轨的可分离设计,导轨系统的加工精度以及其支撑必须满足刚度和精度的要求,成本昂贵;所有的导轨都是沿直线布置的,所以影像设备的拉出方向也是固定的,限制了拉出的方向;第三,对于有导轨的pet主机,在安装过程中必须要先调整导轨的位置,再调整导轨上的pet主机,增加了第一次安装时的工作量。
技术实现要素:
6.(一)要解决的技术问题
7.本发明旨在提供一种用于多重影像系统的pet主机,所述pet主机为无导轨系统的pet主机,省去了现有技术中导轨系统的设置,同时还确保了多重影像系统能够直接、快速地安装到位。同时,本发明还提供了一种多重影像系统的无导轨系统pet主机的安装方法。
8.(二)技术方案
9.为了达到上述目的,本发明采用的主要技术方案包括:
10.一种用于多重影像系统的pet主机,所述pet主机为无导轨系统的pet主机,所述无导轨系统的pet主机配置有用于实现所述pet主机与所述多重影像系统的其余主机定位安装的安装结构,所述安装结构用于所述无导轨系统的pet主机朝向所述其余主机移动时,使所述pet主机的轴线与所述其余主机的轴线重合。
11.优选地,所述pet主机配置的安装结构包括:
12.设置在所述pet主机上的第一定位件;
13.与所述第一定位件配合以实现在所述pet主机上的安装的第二定位件,所述第二定位件具有中心轴线,当所述第二定位件安装于所述pet主机上时,所述中心轴线与所述pet主机的轴线重合。
14.优选地,所述第二定位件具有与所述pet主机的轴线垂直的定位面,以在所述第二定位件与所述第一定位件配合时,所述中心轴线与所述pet主机的轴线重合。
15.优选地,所述第二定位件还具有校准件,所述校准件能够确保所述pet主机在朝向所述其余主机移动时,所述中心轴线保持与所述其余主机的轴线基本重合。
16.优选地,所述校准件可拆卸设置于所述第二定位件;
17.所述校准件为柱状结构,其远端的截面面积小于其近端的截面面积。
18.优选地,所述第一定位件为设置在所述pet主机上的定位孔或定位销;
19.所述第二定位件上对应所述定位孔或定位销设置定位销或定位孔。
20.优选地,所述安装结构还包括设置在所述pet主机上的第一连接件和设置在所述第二定位件上的第二连接件,所述第一连接件和第二连接件在所述pet主机安装过程中可拆卸连接。
21.第二方面,本发明还提供了上述多重影像系统中,无导轨系统pet主机的安装方法,在所述无导轨系统的pet主机朝向所述多重影像系统的其余主机移动以定位安装时,所述安装结构使所述无导轨系统的pet主机的轴线始终与所述其余主机的轴线重合。
22.优选地,安装结构包括设置在所述pet主机上的第一定位件,以及与所述第一定位件配合的第二定位件;
23.所述方法包括如下步骤:
24.安装所述安装结构的第二定位件,将所述第二定位件与第一定位件配合,以实现所述第二定位件的中心轴线与所述pet主机的轴线重合;
25.移动所述pet主机,将所述pet主机朝向所述多重影像系统的其余主机移动,至所述pet主机的安装初始位置;
26.校准安装结构,使所述第二定位件的中心轴线与所述其余主机的轴线基本重合;
27.继续移动所述pet主机,至所述pet主机到达其安装终止位置,所述继续移动过程中,所述中心轴线与所述其余主机的轴线保持基本重合。
28.(三)有益效果
29.本发明提供的用于多重影像系统的pet主机,省略了现有的导轨系统,同时还能确保该pet主机能够与多重影像系统的其余主机直接、快速安装到位。
30.本发明的目在于去掉pet主机下部的支撑装置,包括主导轨和维护导轨;同时,采用结构简单的安装装置,能够使多重影像系统在首次安装时,或者后期维护后的再次安装,都无需借助任何导轨或支撑装置即可实现对准安装到位。并且可以直接使用带有轮子的工装小车将pet主机移动到任何位置,待设备维护之后,采用该安装装置,即可准确地将pet主机复位到之前的位置,保证位置的可靠性。
31.且不再需要对导轨系统的维修保养,有效降低成本。
附图说明
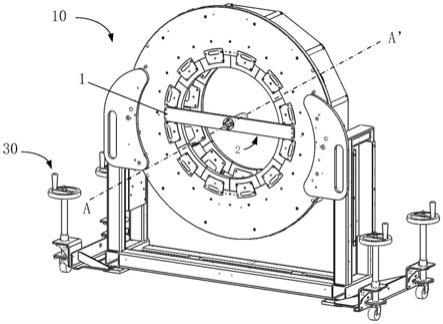
32.图1为本发明提供的petct系统的结构示意图;
33.图2为本发明提供的无导轨pet主机的结构示意图;
34.图3为本发明提供的第二定位件的结构示意图;
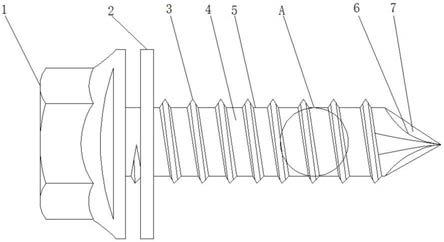
35.图4为本发明提供的校准件的结构示意图;
36.图5为校准件穿设于第二定位件后的部分剖视示意图;
37.图6为图5中部分结构的放大示意图;
38.图7为本发明提供的另一第二定位件的结构示意图;
39.图8为本发明提供的ct主机的结构示意图;
40.图9为本发明提供的petct系统安装方法的流程图。
41.【附图标记说明】
42.10:pet主机;20:ct主机;30:运输工装小车;
43.1:第一定位件;
44.2:第二定位件;21:板状件;22:中心套筒;23:定位面;24:定位孔;25:通孔;
45.3:校准件;31:安装端;32:ct安装部;33:pet安装部;34:导入部;35:标线;36:导入锥部;
46.aa’:轴线;bb’:旋转轴线;aa’:中心轴线。
具体实施方式
47.本发明的核心在于省略现有技术中pet主机中导轨系统的设置,通过结构简单的安装装置,使得多重影像设备在首次安装,或者维护后的再次安装,都能够快速、准确地安装到位。
48.为此,本发明提供了一种用于多重影像系统的pet主机,所述pet主机为无导轨系统的pet主机,所述无导轨系统的pet主机配置有用于实现所述pet主机与所述多重影像系统的其余主机定位安装的安装结构,所述安装结构用于所述无导轨系统的pet主机朝向所述其余主机移动时,使所述pet主机的轴线与所述其余主机的轴线重合。
49.通过上述安装结构,能够使多重影像系统在安装过程中,无需借助任何导轨或支撑装置即可实现pet主机与该多重影像系统的其余主机快速对准安装。且该安装结构零部件数量少,结构简单,易于加工。
50.为了更好的解释本发明,下面结合附图,以第一影像设备是ct、第二影像设备是pet为例,通过具体实施方式,对本发明作详细描述。应当理解,以下以pet和ct为例的多重影像系统仅是为了能够更清楚、透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员,而非对本发明保护范围的限制。其中,不同实施例中相同部分采用相同的附图标记。
51.实施例1
52.图1示例性示出了一种petct系统,该系统包括pet主机10和ct主机20,其中,pet主机10无需导轨系统的支撑,而是通过使用带有轮子的运输工装小车30将pet主机10移动到任何需要的位置。在该pet主机10上配置有将在下文详细描述的安装结构,使得pet主机10朝向ct主机20移动以安装时,能够轻松地将pet主机10的轴线aa’与ct主机20的旋转轴线bb’重合。
53.图2进一步优选地示出了本实施例提供的无导轨系统的pet主机10。对于pet主机
10而言,pet探测器安装在pet安装板上,pet安装板是一个加工规则的金属铝板或者金属钢板,所以其轴心就是金属板的轴心,探测器被精确地安装在金属板上,所以探测器轴线与金属板的轴线重合,以下将以轴线aa’表征pet主机的上述轴线。
54.其中,该pet主机10配置的安装结构,包括设置在所述pet主机10上的第一定位件1,第一定位件1可以具有多种不同的结构,在本实施例中,该第一定位件1优选地为定位孔或定位销。安装结构还包括能够与该第一定位件1配合以实现在所述pet主机10上的安装的第二定位件2,如图3示例性示出的,所述第二定位件2具有中心轴线aa’,当所述第二定位件2安装于所述pet主机10上时,所述中心轴线aa’与所述pet主机10的轴线aa’重合。该第二定位件2具有与所述pet主机10的轴线aa’垂直的定位面23,以在所述第二定位件2与所述第一定位件1配合时,所述中心轴线aa’与所述pet主机10的轴线aa’重合。
55.本实施例中,如图3所示,第二定位件2包括一细长的板状件21和设置在板状件21上并与该板状件垂直延伸的中心套筒22。优选地,所述第二定位件2还具有如图4示例性示出的校准件3,所述校准件3能够确保所述pet主机10在朝向ct主机20移动时,所述中心轴线aa’保持与ct主机20的轴线bb’基本重合。其中,设置在板状件21上的中心套筒22用于与校准件3可拆卸连接。本实施例中的可拆卸连接,包括在需要时通过将校准件3插入并穿设该中心套筒22,在使用完毕后,将校准件3从中心套筒22中取出的情况,当然,对于本领域技术人员而言,可拆卸连接并不局限于上述情况。该中心套筒22具有中心轴线aa’。其中,板状件21的长度应大于pet安装板的最小孔径,如可以为980mm。为了保证该第二定位件2安装到pet主机之后其与pet主机相接的定位面23能够垂直于pet主机的轴线aa’,对于该定位面23有较高的平面度要求,本实施例中优选小于0.10mm,这样有助于确保本实施例提供的无导轨系统的pet主机借助该安装结构,能够轻松对准ct主机并完成与ct主机的安装。
56.为了匹配中心套筒22在板状件21上的设置,在该板状件21的中心位置,对应中心套筒22精确开设有圆孔,圆孔尺寸优选为45
‑
55mm,更为优选的,可以是50mm,公差为h7。其中,"h"表示基孔制配合,其下偏差为0的基本偏差。“7”则代表公差等级。
57.进一步优选地,如图6的放大示意图中示出的,在本实施例中,该中心套筒22两端部的内径小于除所述两端部外其余部分的内径,以在中心套筒22除两端部外的其余部分和校准件3之间形成配合间隙较大的配合,优选该配合间隙约为0.10mm,以此方便安装和定位。只在两端的部分配合,既保证了定位效果,又降低了安装难度,同时降低了成本。
58.此外,在本实施例中,中心套筒22的外径可以是45
‑
55mm,更为优选的,可以是50mm,公差为h7。中心套筒22总长可以是150
‑
250mm,更为优选的,可以是200mm。中心套筒22内孔尺寸可以对应其外径尺寸设置,如35
‑
45mm,也可以选择为40mm,公差为h7。这样,可以确保第二定位件2安装在pet主机之后,中心套筒22与校准件3精准配合,使第二定位件2的中心轴线aa’始终保持与无导轨系统的pet主机的轴线aa’拟合,确保对准过程的准确性。
59.可选地,在第二定位件2的两端分别都设置定位孔24和通孔25,以快速、方便地将该第二定位件2准确定位并安装至pet主机上。pet主机10上对应通孔25设置有螺纹孔,螺纹孔和通孔25的配合方便定位后将第二定位件2螺纹紧固连接于pet主机10上。
60.在本实施例中,对于第二定位件2、校准件3的材料有一定的精度要求和刚度要求,本实施例中,板状件21和中心套筒22优选采用铝材来制备,如材料代号为6061的铝材;校准件3由于具备一定的长度,优选采用钢材制备。
61.可拆卸设置于所述第二定位件2的校准件3优选为具有远端和近端柱状结构,其远端的截面面积小于其近端的截面面积,以使得pet主机10在其安装初始位置,能够轻松地使第二定位件2的中心轴线aa’与ct主机20的旋转轴线bb’重合。在本发明中,以靠近ct主机20的一端为近端,远离ct主机20的一端为远端,也是校准件3的自由端。当然,校准件3可以有不同的结构,如本实施例中示例性示出的阶梯柱状零件,其经过精确的机械加工,使得其轴线的直线度小于0.50mm。进一步地,校准件3包括从近端至远端依次设置的安装端31、ct安装部32、pet安装部33及导入部34;所述安装端31、ct安装部32、pet安装部33及导入部34的直径由大至小。在本实施例中,校准件3还可以包括导入锥部36,该导入锥部36一端连接pet安装部33,并且具有与该pet安装部33相同的直径;导入锥部36的另一端连接导入部34,并且具有与该导入部34相同的直径,配合图4所示,导入锥部36的直径由一端至另一端是逐渐变化的,以引导pet主机10上的第二定位件2,快速到达pet安装部33。并且,为了方便确认pet主机是否安装到位,优选地在pet安装部33靠近所述导入锥部36一端,设置有用于标识所述pet主机10安装到位的标线35。该标线35表示,在该第二定位件2自由端的端面与所述标线35重合时,pet主机在z向上已经到位。
62.进一步的,所述导入部34的长度可以设置为50
‑
150mm,更为优选的,可以是100mm,且在其整个长度上具有不变的直径,如25mm、30mm或者35mm,。
63.当然,在pet主机10平移至其上的第二定位件2即将接触校准件3时,为了降低对pet主机10初始位置准确性的要求,方便校准件3容易对准并穿过pet主机上的第二定位件2,在导入部34最先接触该pet主机10上的第二定位件2的一端处,增设一段直径更小的导入部,该导入部的直径例如为15mm、20mm或者25mm,长度同样可以是50
‑
150mm,更为优选的长度可以是100mm。
64.此外,所述第二定位件2上还对应所述定位孔或定位销设置定位销或定位孔,以使得第二定位件2能够准确在pet主机10和/或ct主机20上定位。
65.优选地,所述安装结构还包括设置在所述pet主机10上的第一连接件和设置在所述第二定位件2上的第二连接件,所述第一连接件和第二连接件在所述pet主机10的安装过程中可拆卸连接。上述连接件可以是本领域中常见的螺纹紧固件。
66.实施例1提供的无导轨系统的pet主机,省略了现有导轨系统的情况下,借助于上述安装结构,实现了该pet主机能够与多重影像系统的其余主机直接、快速安装到位,减少占地面积及降低使用成本。
67.实施例2
68.为了实现无导轨系统的pet主机10与ct主机20的对准安装,方便两者拆卸以进行维护,本实施例对ct主机20上的安装结构进行说明。参见图7、8,本实施例中提供了另一种第二定位件2的结构,该第二定位件2在需要的时候以可拆卸的方式安装在ct主机20上,方便无导轨系统的pet主机10与该ct主机20进行对准安装。
69.其中,图8示出了安装了上述第二定位件2的ct主机20,该ct主机20具有滑环安装平面和旋转轴线bb’,该滑环安装平面垂直于旋转轴线bb’。ct主机20的旋转部分安装在轴承的内环上,在内环上,还安装有x射线管,高压装置以及探测器部分。在旋转内环上还固定连接有用于实现无导轨系统pet主机10和ct主机20安装的安装结构。
70.本实施例中,安装结构大体与实施例1中的相同,以下对于相同的结构将不再做详
细说明。安装结构包括设置于ct主机20上的第一定位件1、通过第一定位件1准确定位并可拆卸连接于ct主机20上的第二定位件2和通过穿设的方式可拆卸连接于第二定位件2的校准件3。如图8所示,第二定位件2可以通过设置在ct机架上的第一定位件1,如定位销,准确定位在ct主机20上。
71.如图7中示例性示出的,第二定位件2也包括一细长的板状件21和设置在板状件21上并与该板状件垂直延伸的中心套筒22。在本实施例中,连接于ct主机20上的板状件21的长度只需要稍大于ct主机20的物理孔径内径即可,一般而言,该物理孔径为760mm,也即,板状件21的长度优选为880mm。第二定位件2的定位面23的平面度优选应小于0.10mm,确保安装之后定位面23能够垂直于ct主机20的旋转轴线bb’。同时,第二定位件2上的通孔具有和中心套筒22的内径基本相同的直径,如50
‑
60mm,更为优选的,可以是55mm;通孔的公差为h7,其中,"h"表示基孔制配合,其下偏差为0的基本偏差。“7”则代表公差等级。
72.此外,在第二定位件2定位在ct主机20上后,为了使第二定位件2紧固在ct主机20上,防止其发生位移或脱落影响影像设备后续的安装,第二定位件2上还可以在其两端分别设置通孔25,以便在第二定位件2定位在ct主机20上的正确位置之后,通过如螺钉等螺纹紧固件,可拆卸连接到ct主机20上。
73.优选地,中心套筒22和板状件21一体成型,也可以通过法兰和螺钉,可拆卸连接于板状件21上。无论是何种设置方式,中心套筒22都垂直于板状件21延伸。具体地,当中心套筒22螺纹连接于板状件21上时,中心套筒22的一端设置法兰,法兰端面与中心套筒22的内外环应保持垂直,垂直度公差应小于0.05mm。采取可拆卸的螺纹连接,方便标准化加工,同时方便维护,降低维护成本。
74.可选地,该中心套筒22在其长度方向上具有相同的内径。在本实施例中,中心套筒22的外径可以选择为50
‑
60mm,更为优选的,可以是55mm,公差为h7。中心套筒22总长可以选择为150
‑
250mm,更为优选的,可以是200mm。中心套筒22内孔尺寸可以对应其外径尺寸设置,如40
‑
50mm,也可以是45mm,公差为h7。这样,在第二定位件2安装在ct主机20之后,能够使中心套筒22始终保持第二定位件2垂直,以确保对准过程的准确性。
75.进一步的,由于需要确保安装的准确性,对于第二定位件2的制备材料有明确的精度要求和刚度要求,因此,上述安装结构可以采用金属材料制成,在本实施例中第二定位件2采用铝材制备,当然,也可以采用钢材制备,校准件3优选采用钢材,如材料代号为45的钢材加工制成。
76.如图8所示,当所述第二定位件2安装于ct主机20上时,所述校准件3穿过所述中心套筒22,使得第二定位件2的中心轴线aa’与ct的旋转轴线bb’重合。
77.在本实施例中,校准件3与中心套筒22为间隙配合,且配合间隙优选小于0.01mm,同时,两者的配合在中心套筒22的整个长度上都是全面配合,这样能保证校准件3安装之后,该中心套筒22仍然处于一个水平的状态,配合的间隙和配合面长度决定了校准件3伸出第一定位结构的一端,受重力影响的形变量。在本实施例中,能够保证该形变量小于系统在y方向上的允许误差的一半,以此确保petct系统的装配效果。
78.采用本实施例提供的安装结构,可以省略pet主机10上的支撑装置或者导轨系统,在安装的过程以及维护的过程中,借助于pet主机10的运输工装小车30,配合本实施例提供的上述安装结构,即可实现与ct主机20的准确安装,且整个过程能够方便可控地进行位置
校准。
79.实施例3
80.在本实施例中,提供了上述无导轨系统pet主机的安装方法,仍然是以petct系统为例,具体地,在安装过程中,所述无导轨系统的pet主机10朝向ct主机20移动以定位安装时,上述实施例中的安装结构使所述无导轨系统的pet主机10的轴线aa’始终与ct主机的旋转轴线bb’重合。这样,省略了现有技术中,pet主机的下部设置的导轨系统或类似的支撑装置,降低了该影像系统的制备、使用和维护成本,同时也减少占地面积。
81.优选地,该无导轨pet主机的安装方法,具体包括如下步骤:
82.s10、安装所述安装结构的第二定位件2,将所述第二定位件2与第一定位件1配合,以实现所述第二定位件2的中心轴线aa’与所述pet主机10的轴线aa’重合。
83.s20、移动所述pet主机10,将所述pet主机10朝向ct主机20移动,至所述pet主机10的安装初始位置。
84.该安装初始位置,是指,安装在pet主机10上的第二定位件2大致接触到穿设于ct主机20的第二定位件2并伸出的校准件的远端。在到达该安装初始位置之前,由于pet主机10是通过运输工装小车30向ct主机20移动,该pet主机10的移动路线并不局限于类似在导轨上的直线运动,可以相对随意地往ct主机20移动该pet主机10即可,此时也不需要pet主机10的轴线aa’与ct主机20的旋转轴线bb’对齐或重合。
85.s30、校准安装结构,使所述第二定位件2的中心轴线aa’与ct主机的旋转轴线bb’基本重合。
86.如实施例1、2中描述的,校准件3的远端截面较小,pet主机10从安装初始位置继续朝向ct主机20移动时,能够使得校准件3的远端轻松穿过pet主机10上的第二定位件2,实现pet主机10的轴线aa’、pet主机10上的第二定位件2的中心轴线aa’、以及ct主机20的旋转轴线bb’三者以处于大致重合的状态。
87.s40、继续移动所述pet主机,至所述pet主机到达其安装终止位置,所述继续移动过程中,所述中心轴线aa’与所述ct主机20的旋转轴线bb’保持基本重合。
88.本发明提供的无导轨系统的pet主机的安装方法,不仅仅适用于第一次安装,而且适用于需要移走pet主机进行滑环维修的情况,配合使用该安装结构的安装方法完全能够满足于滑环维修的情况以及维修之后,无导轨系统的pet主机的复位,并保证复位精度。
89.具体地,在安装的时候,先调整ct主机20的位置,调整好其水平位置,滑环安装面相对于水平面垂直,然后使用膨胀螺栓将其固定,然后以ct主机20为基准,将校准件3插入安装在ct主机20上的第二定位件2中。
90.校准件3安装之后,其可以表征一条轴线,而这条轴线就是ct主机的旋转轴线bb’的延长线,所以只需要将无导轨系统的pet主机10借助于运输工装小车30向ct主机20移动并靠近,之后将安装于pet主机10上的第二定位件2对准校准件3并继续向ct主机20移动pet主机10至其安装位置,就说明pet主机10和ct主机20的轴线已经重合,此时如果pet主机10不水平,将其调整水平。
91.在实际的安装过程中,为了方便工程的可实现性,校准件3是一个阶梯轴的结构,这样的设计在pet主机10在安装初始位置时,对pet主机的位置要求低,校准件3进入pet主机10上的第二定位件2之后,通过调节四个角的运输工装小车,缓慢移动,逐渐进入校准件3
的导入部34,然后继续向前移动,使之进入校准件3的导入锥部36,最后进入pet安装部33,中心套筒22自由端的端面与标线35重合的时候,表明z向已经到位。
92.然后,调整pet主机10的四个地脚,使其有效的与地面接触,形成有效且稳定的支撑,然后逐一拆下校准件3、ct主机20上的第二定位件2,pet主机10上的第二定位件2。至此,无导轨系统的pet主机的整个安装对准过程完成。
93.应理解的是,在实际应用当中,机械的调整是第一步的调整,满足一定的精度之后,可以再进行软件的补偿。因为对于机械的对准安装而言,通常x,y,z方向的平移<2mm;在xz,yz,xy平面的旋转<0.1度。经过现场的实施,本实施例提供的对准方法可以很好地满足这样的精度要求,方案具有较好的可实现性。
94.本发明提供的无导轨系统的pet主机的安装方法,无论是首次安装,还是后期维护后的再次安装,都无需借助任何导轨或支撑装置即可实现对准安装到位,安装过程简单、高效,且省去了对导轨系统的维修保养,有效降低成本。
95.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行改动、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。