1.本发明涉及的是自动驾驶领域,特别涉及一种相同起终点自动驾驶路线分类统计评分的方法。
背景技术:
2.随着自动驾驶技术的发展和应用,越来越多的车企和自动驾驶服务供应商,在中国多个城市部署了自动驾驶出租车,提供固定起终点叫车服务。相同起终点,同一个供应商的不同车辆或不同供应商的不同车辆无人驾驶规划路线不同,不同路线路况不同,导致车辆自动驾驶稳定性不同,时长、距离、能耗也不同。因此,亟需一种对相同起终点自动驾驶路线进行分类和统计评分的方法。
技术实现要素:
3.鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的一种相同起终点自动驾驶路线分类统计评分的方法。
4.为了解决上述技术问题,本技术实施例公开了如下技术方案:
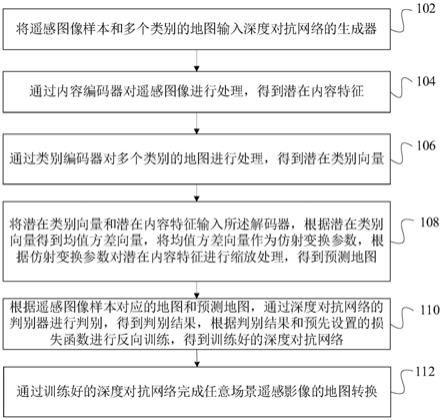
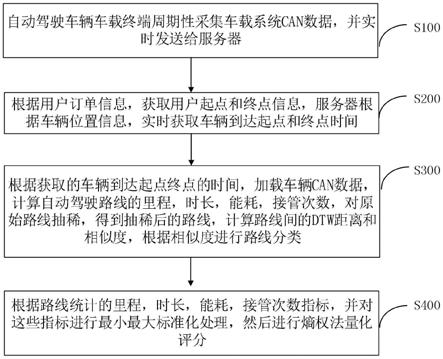
5.一种相同起终点自动驾驶路线分类统计评分的方法,包括:
6.s100.自动驾驶车辆车载终端周期性采集车载系统can数据,并实时发送给服务器;
7.s200.根据用户订单信息,获取用户起点和终点信息,服务器根据车辆位置信息,实时获取车辆到达起点和终点时间;
8.s300.根据获取的车辆到达起点终点的时间,加载车辆can数据,计算自动驾驶路线的里程,时长,能耗,接管次数,对原始路线抽稀,得到抽稀后的路线,计算路线间的dtw距离和相似度,根据相似度进行路线分类;
9.s400.根据路线统计的里程,时长,能耗,接管次数指标,并对这些指标进行最小最大标准化处理,然后进行熵权法量化评分。
10.进一步地,s100中,车载can数据包括:车架号,经纬度,速度,驾驶模式,总电流,总电压以及采集时间。
11.进一步地,s300中,计算自动驾驶路线的里程的方法为:定义路线上所有点为pi,其中,i=1,2,.....,k,.....m;m为路线上点的总个数,dis(p(k
‑
1),pk)表示订单行程中相邻两个点的距离,longitude(pk)当前点经度,latitude(pk)当前点纬度,r为地球半径,则dis(p(k
‑
1),pk)计算公式为:
12.dis(p(k
‑
1),pk)=2*math.asin(math.sqrt(math.pow(math.sin(a/2),2) math.cos(radlat1)*math.cos(radlat2)*math.pow(math.sin(b/2),2)))*r;
13.其中,radlat1=rad(latitude(pk)),为点pk处纬度的弧度,radlat2=rad(1atitude(p(k
‑
1))),为点p(k
‑
1)处纬度的弧度,a=radlat1
‑
radlat2;b=rad(longitude(pk))
‑
rad(longitude(p(k
‑
1)))。
14.进一步地,s300中,计算自动驾驶路线的时长的方法为:定义路线上所有点为pi,其中,i=1,2,.....,k,.....m;m为路线上点的总个数,time(p(k
‑
1),pk)表示订单行程中相邻两个点的时长,collecttime(pk)表示当前点采集时间,则:
15.time(p(k
‑
1),pk)=collecttime(pk)
‑
collecttime(p(k
‑
1))。
16.进一步地,s300中,计算自动驾驶路线的能耗的方法为:定义路线上所有点为pi,其中,i=1,2,.....,k,.....m;m为路线上点的总个数,power(p(k
‑
1),pk)表示相邻两个点能耗,voltage(pk)车辆瞬时的总电压,current(pk)车辆瞬时总电流,则:
17.power(p(k
‑
1),pk)=voltage(pk)*current(pk)*time(p(k
‑
1),pk)。
18.进一步地,s300中,计算自动驾驶路线的接管次数的方法为:定义前一个点是自动驾驶,当前点是手动驾驶为一次接管次数,takeover(p(k
‑
1),pk)表示相邻两个点接管次数,runmode(pk)表示当前点的驾驶模式:runmode=1手动驾驶;runmode=2远程驾驶;runmode=3自动驾驶;则:
[0019][0020]
进一步地,s300中,通过道格拉斯
·
普克算法对原始路线抽稀,得到抽稀后的路线。
[0021]
进一步地,计算路线间的dtw距离方法为:定义抽稀后的路线为tab,定义起终点的路线集sab={t1,t2,......,tk},分别计算抽稀路线tab与集合sab中每条路线tk的dtw动态时间规划距离,定义路线tab到sab中每条路线tk的动态时间规划路径集合为w,则w={w1,w2,w3,...wz},max(m,n)≤z≤m n
‑
1,m为抽吸路线tab点个数,n为路线tk点个数;则路线tab与集合sab中每条路线tk的dtw动态距离为:
[0022][0023]
进一步地,计算路线间的相似度的方法为:利用底数小于1的单调递减的指数函数对dtw距离进行归一化处理,相似度计算公式:
[0024]
sim=g
dtw(tab,tk)
*100%
[0025]
过滤出相似度大于阀值α的路线集similarab={t1,t2,......,tk},在相似路线集中找出相似度最大的路线tmax,标记订单路线为tmax,如果不存在相似度大于阀值α的路线,将tab作为一条新的路线加入路线集sab,并标记订单路线为tab。
[0026]
进一步地,s400的具体方法为:
[0027]
s401.统计相同起终点的每条路线得行驶里程,时长,订单数,能耗,接管次数等指标;
[0028]
s402.对统计的指标进行min
‑
max标准化,得到每条路线的标准化指标;
[0029]
s403.计算各指标的信息熵和信息熵冗余度;
[0030]
s404.确定各指标权重;
[0031]
s405.对各个路线进行评分。
[0032]
本发明实施例提供的上述技术方案的有益效果至少包括:
[0033]
本发明公开的一种相同起终点自动驾驶路线分类统计评分的方法,包括:自动驾驶车辆车载终端周期性采集车载系统can数据,并实时发送给服务器;根据用户订单信息,
获取用户起点和终点信息,服务器根据车辆位置信息,实时获取车辆到达起点和终点时间;根据获取的车辆到达起点终点的时间,加载车辆can数据,计算自动驾驶路线的里程,时长,能耗,接管次数,对原始路线抽稀,得到抽稀后的路线,计算路线间的dtw距离和相似度,根据相似度进行路线分类;根据路线统计的里程,时长,能耗,接管次数指标,并对这些指标进行最小最大标准化处理,然后进行熵权法量化评分。本发明公开的一种相同起终点自动驾驶路线进行分类和统计评分的方法,帮助自动驾驶出租车运营商有效分析运营路线,选择合适的自动驾驶供应商,帮助自动驾驶供应商优化自动驾驶规划路线。
[0034]
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
[0035]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0036]
图1为本发明实施例1中,一种相同起终点自动驾驶路线分类统计评分的方法的流程图;
[0037]
图2为本发明实施例1中,路线分类的数据处理流程图;
[0038]
图3为本发明实施例2中,路线评分的数据处理流程图。
具体实施方式
[0039]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0040]
为了解决现有技术中存在的问题,本发明实施例提供一种相同起终点自动驾驶路线分类统计评分的方法。
[0041]
实施例1
[0042]
本实施例公开了一种相同起终点自动驾驶路线分类统计评分的方法,如图1,包括:
[0043]
s100.自动驾驶车辆车载终端周期性采集车载系统can数据,并实时发送给服务器;具体的,车载can数据包括:车架号,经纬度,速度,驾驶模式,总电流,总电压以及采集时间。服务端根据车辆注册信息进行鉴权,鉴权通过后标记车辆具体的供应商信息,然后入库。
[0044]
s200.根据用户订单信息,获取用户起点和终点信息,服务器根据车辆位置信息,实时获取车辆到达起点和终点时间;具体的,乘客通过打车app,选定起点终点下单后,订单分车后会关联车辆唯一标识,服务端实时记录车辆到达起点和终点的时间并更新到订单表。
[0045]
s300.根据获取的车辆到达起点终点的时间,加载车辆can数据,计算自动驾驶路线的里程,时长,能耗,接管次数,对原始路线抽稀,得到抽稀后的路线,计算路线间的dtw距离和相似度,根据相似度进行路线分类。
[0046]
具体的,如图2,计算自动驾驶路线的里程的方法为:定义路线上所有点为pi,其
中,i=1,2,.....,k,.....m;m为路线上点的总个数,dis(p(k
‑
1),pk)表示订单行程中相邻两个点的距离,longitude(pk)当前点经度,latitude(pk)当前点纬度,r为地球半径,则dis(p(k
‑
1),pk)计算公式为:
[0047]
dis(p(k
‑
1),pk)=2*math.asin(math.sqrt(math.pow(math.sin(a/2),2) math.cos(radlat1)*math.cos(radlat2)*math.pow(math.sin(b/2),2)))*r;
[0048]
其中,radlat1=rad(latitude(pk)),为点pk处纬度的弧度,radlat2=rad(latitude(p(k
‑
1))),为点p(k
‑
1)处纬度的弧度,a=radlat1
‑
radlat2;b=rad(longitude(pk))
‑
rad(longitude(p(k
‑
1)))。
[0049]
计算自动驾驶路线的时长的方法为:定义路线上所有点为pi,其中,i=1,2,.....,k,.....m;m为路线上点的总个数,time(p(k
‑
1),pk)表示订单行程中相邻两个点的时长,collecttime(pk)表示当前点采集时间,则:
[0050]
time(p(k
‑
1),pk)=collecttime(pk)
‑
collecttime(p(k
‑
1))。
[0051]
计算自动驾驶路线的能耗的方法为:定义路线上所有点为pi,其中,i=1,2,.....,k,.....m;m为路线上点的总个数,power(p(k
‑
1),pk)表示相邻两个点能耗,voltage(pk)车辆瞬时的总电压,current(pk)车辆瞬时总电流,则:
[0052]
power(p(k
‑
1),pk)=voltage(pk)*current(pk)*time(p(k
‑
1),pk)。
[0053]
计算自动驾驶路线的接管次数的方法为:定义前一个点是自动驾驶,当前点是手动驾驶为一次接管次数,takeover(p(k
‑
1),pk)表示相邻两个点接管次数,runmode(pk)表示当前点的驾驶模式:runmode=1手动驾驶;runmode=2远程驾驶;runmode=3自动驾驶;则:
[0054][0055]
在一些优选实施例中,车端上传的数据存在gps定位漂移的情况,需要剔除异常点,尽可能保留路线的真实位置特性。剔除原则单位时间内距离不可达,剔除方法如下:avgspeed=dis(p(k
‑
1),pk)/time(p(k
‑
1),pk)表示到达该点平均速度,自动驾驶车辆速度上限法规要求一般在60km/h。根据经验,当平均速度avgspeed超过法规上限50%时,认为该点是异常点,剔除该订单路线中的异常点pk。
[0056]
在剔除异常点的路线上,计算订单对应的里程,时长,能耗和接管次数。
[0057][0058][0059][0060][0061]
在本实施例中,计算路线间的dtw距离方法为:定义抽稀后的路线为tab,定义起终点的路线集sab={t1,t2,......,tk},分别计算抽稀路线tab与集合sab中每条路线tk的dtw动态时间规划距离,定义路线tab到sab中每条路线tk的动态时间规划路径集合为w,则w={w1,w2,w3,...wz},max(m,n)≤z≤m n
‑
1,m为抽吸路线tab点个数,n为路线tk点个数;则
路线tab与集合sab中每条路线tk的dtw动态距离为:
[0062][0063]
在本实施例中,计算路线间的相似度的方法为:利用底数小于1的单调递减的指数函数对dtw距离进行归一化处理,相似度计算公式:
[0064]
sim=g
dtw(tab,tk)
*100%
[0065]
过滤出相似度大于阀值α的路线集similarab={t1,t2,......,tk},在相似路线集中找出相似度最大的路线tmax,标记订单路线为tmax,如果不存在相似度大于阀值α的路线,将tab作为一条新的路线加入路线集sab,并标记订单路线为tab。
[0066]
s400.根据路线统计的里程,时长,能耗,接管次数指标,并对这些指标进行最小最大标准化处理,然后进行熵权法量化评分。
[0067]
具体的,如图3,s400的具体方法为:
[0068]
s401.统计相同起终点的每条路线得行驶里程,时长,订单数,能耗,接管次数等指标;具体的,按路线分组统计每条路线的上的车辆行驶里程,时长,能耗,接管次数等指标。说明对于n条路线,m个指标,则xij为第i条路线的第j个指标(i=1,2,...,n;j=1,2,...m)。
[0069]
s402.对统计的指标进行min
‑
max标准化,得到每条路线的标准化指标;具体的,对统计后的每个指标进行min
‑
max标准化处理,得到标准化值yij。例如:正向指标负向指标
[0070]
s403.计算各指标的信息熵和信息熵冗余度;具体的,计算各个指标的信息熵,先确定第i条路线的第j个指标占该指标的比重:
[0071][0072]
第j个指标的熵值:
[0073][0074]
其中k=1/ln(n)>0,满足ej≥0。
[0075]
信息熵冗余度:dj=1
‑
ej,j=1,2...,m
[0076]
s404.确定各指标权重;具体的,权重指标计算公式为:j=1,2...,m。
[0077]
s405.对各个路线进行评分。具体的,对各个路线进行评分的计算公式为
[0078]
本实施例公开的一种相同起终点自动驾驶路线分类统计评分的方法,包括:自动驾驶车辆车载终端周期性采集车载系统can数据,并实时发送给服务器;根据用户订单信
息,获取用户起点和终点信息,服务器根据车辆位置信息,实时获取车辆到达起点和终点时间;根据获取的车辆到达起点终点的时间,加载车辆can数据,计算自动驾驶路线的里程,时长,能耗,接管次数,对原始路线抽稀,得到抽稀后的路线,计算路线间的dtw距离和相似度,根据相似度进行路线分类;根据路线统计的里程,时长,能耗,接管次数指标,并对这些指标进行最小最大标准化处理,然后进行熵权法量化评分。本发明公开的一种相同起终点自动驾驶路线进行分类和统计评分的方法,帮助自动驾驶出租车运营商有效分析运营路线,选择合适的自动驾驶供应商,帮助自动驾驶供应商优化自动驾驶规划路线。
[0079]
应该明白,公开的过程中的步骤的特定顺序或层次是示例性方法的实例。基于设计偏好,应该理解,过程中的步骤的特定顺序或层次可以在不脱离本公开的保护范围的情况下得到重新安排。所附的方法权利要求以示例性的顺序给出了各种步骤的要素,并且不是要限于所述的特定顺序或层次。
[0080]
在上述的详细描述中,各种特征一起组合在单个的实施方案中,以简化本公开。不应该将这种公开方法解释为反映了这样的意图,即,所要求保护的主题的实施方案需要清楚地在每个权利要求中所陈述的特征更多的特征。相反,如所附的权利要求书所反映的那样,本发明处于比所公开的单个实施方案的全部特征少的状态。因此,所附的权利要求书特此清楚地被并入详细描述中,其中每项权利要求独自作为本发明单独的优选实施方案。
[0081]
本领域技术人员还应当理解,结合本文的实施例描述的各种说明性的逻辑框、模块、电路和算法步骤均可以实现成电子硬件、计算机软件或其组合。为了清楚地说明硬件和软件之间的可交换性,上面对各种说明性的部件、框、模块、电路和步骤均围绕其功能进行了一般地描述。至于这种功能是实现成硬件还是实现成软件,取决于特定的应用和对整个系统所施加的设计约束条件。熟练的技术人员可以针对每个特定应用,以变通的方式实现所描述的功能,但是,这种实现决策不应解释为背离本公开的保护范围。
[0082]
结合本文的实施例所描述的方法或者算法的步骤可直接体现为硬件、由处理器执行的软件模块或其组合。软件模块可以位于ram存储器、闪存、rom存储器、eprom存储器、eeprom存储器、寄存器、硬盘、移动磁盘、cd
‑
rom或者本领域熟知的任何其它形式的存储介质中。一种示例性的存储介质连接至处理器,从而使处理器能够从该存储介质读取信息,且可向该存储介质写入信息。当然,存储介质也可以是处理器的组成部分。处理器和存储介质可以位于asic中。该asic可以位于用户终端中。当然,处理器和存储介质也可以作为分立组件存在于用户终端中。
[0083]
对于软件实现,本技术中描述的技术可用执行本技术所述功能的模块(例如,过程、函数等)来实现。这些软件代码可以存储在存储器单元并由处理器执行。存储器单元可以实现在处理器内,也可以实现在处理器外,在后一种情况下,它经由各种手段以通信方式耦合到处理器,这些都是本领域中所公知的。
[0084]
上文的描述包括一个或多个实施例的举例。当然,为了描述上述实施例而描述部件或方法的所有可能的结合是不可能的,但是本领域普通技术人员应该认识到,各个实施例可以做进一步的组合和排列。因此,本文中描述的实施例旨在涵盖落入所附权利要求书的保护范围内的所有这样的改变、修改和变型。此外,就说明书或权利要求书中使用的术语“包含”,该词的涵盖方式类似于术语“包括”,就如同“包括,”在权利要求中用作衔接词所解释的那样。此外,使用在权利要求书的说明书中的任何一个术语“或者”是要表示“非排它性
的或者”。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。