1.本公开总体上涉及定位移动标签设备,也被称为“标记”。另外,本公开总体涉及实施超宽带定位系统。特别是,当前公开涉及(特别是室内)超宽带定位方法以及系统。
背景技术:
2.了解目标的室内位置可能是对于例如工业或商业存储处理、在所谓智能工厂中生产、或物理姿势的动作检测的基本的功能需求。出于这种目的,室内定位系统被开发,提供有低至几厘米或毫米的精度的位置信息。
3.超宽带(uwb)定位系统使用uwb信号去测量uwb定位系统特别是移动标签设备以及固定设备之间的部件之间的距离。了解移动标签设备到一些固定设备的距离使得能够确定在二维(2d)或三维(3d)空间中的移动标签设备的位置。例如,在室内环境中,这样的uwb定位系统可以被使用,用于追踪工件,工作工具,工人,包裹,购物车等。当操作uwb定位系统时,被考虑的方面包括定位准确性、频率(定位可以以该频率被重复(也被称为定位率))、以及可以使用uwb定位系统定位的移动标签设备的数量。
4.ubw定位系统通常基于良好定义的uwb信号的发射时间点,以及接收时间点的精确的测量。uwb信号的发射以及接收的精确定时被要求,以允许测量,例如飞行时间(tof)测量(也被称为到达时间(toa)测量)或具有所需精度的到达时间差测量(tdoa)。
5.通常,定位系统基于定位率帧格式,该定位率帧格式在时间上定义通常在定位测量的一个周期内执行的相应的活动。本技术人于2019年4月19日提交的国际专利申请pct/ib2019/000745公开了示例性uwb定位系统、定位协议和相对于其内容定义uwb信号的基础uwb帧格式。国际专利申请的整个内容pct/ib2019/000745被并入本文,特别是这些明确在下文定义的部分。
6.标签设备可以作为标签或移动单元被形成和/或使用,例如,在wo 2018/073421a3以及还未公布的德国专利申请de 102019112781.5中所描述。在其中,示例性使用以及较优的进一步实施例以及移动标签设备的方面以及它们在例如,生产环境或在自动导引车中的实施被公开。
7.因此,本公开旨在改进或克服现有系统一个或更多的方面的至少一部分。
技术实现要素:
8.在第一方面,本公开针对用于确定标签设备的位置的实时定位系统(rtls)。特定的定位系统是以标签设备为中心的,其意义在于标签设备的位置可以在移动标签设备上被导出。因此,标签设备例如不需要发射例如uwb信号,并且可以执行自身的位置计算。换言之,标签设备被配置为是自定位(与例如在某些主(固定)定位系统处执行定位的以服务器为中心的方法相反)。
9.在另一方面,超宽带室内实时定位系统,用于在定位区域内确定移动标签设备的位置,该系统包括
10.‑
多个uwb信号发射机,位于预设的位置并且定义定位区域,其中uwb信号发射机以同步时钟操作,以及被配置为基于uwb帧格式传送uwb信号,其中uwb帧格式包括唯一信息内容,用于uwb信号发射机本地/相应地发射uwb信号;以及
11.‑
至少一个移动标签设备,包括信号接收单元,被配置为接收uwb信号,时间检测单元,被配置为导出接收的uwb信号的相应的到达时间点,识别单元,被配置为从接收的uwb信号导出唯一信息内容,以及控制单元,被配置为在定位算法中,处理唯一信息内容以及至少uwb信号发射机的子集的到达时间点,以导出关于uwb信号发射机的子集的移动标签设备的位置。
12.在另一方面,实时定位方法用于确定移动标签设备的位置,包括步骤:
13.‑
使用基于定位率帧格式以及uwb帧格式的交换协议传送uwb信号,其中定位率帧格式包括信标部分,信标部分包括与多个uwb信号发射机中的uwb信号发射机相关联的一系列时隙,以确保uwb信号从uwb信号发射机时间同步的发送,并且uwb帧格式包括具有用于本地/相应地发射uwb信号的uwb信号发射机的唯一信息内容的条目;
14.‑
在移动标签设备处接收uwb信号;
15.‑
在移动标签设备处导出接收的uwb信号的相应到达时间点;
16.‑
从接收的uwb信号导出唯一信息内容;以及
17.‑
在定位算法中,处理唯一信息内容以及至少多个uwb信号发射机的子集的到达时间点,以导出移动标签设备相对于至少一个uwb信号发射机的子集的位置。
18.在定位系统的一些实施例中,控制单元进一步可以被配置为基于唯一信息内容识别uwb信号发射机的位置,唯一信息内容包括全球或本地的唯一位置信息,并且可选地编码相应的uwb信号发射机的位置的坐标,坐标相对于全球参考或本地参考而被给出,并且提供uwb信号发射机的位置作为定位算法的输入值。
19.在定位系统的一些实施例中,控制单元进一步可以被配置为基于唯一信息内容以及基于查找表来识别uwb信号发射机的位置,唯一信息内容编码相应的uwb信号发射机的标识符,查找表将编码标识符与uwb信号发射机的位置的坐标相关联,uwb信号发射机的位置的坐标是相对于全球参考或本地参考被给出的,并且控制单元进一步提供uwb信号发射机的位置作为定位算法的输入值。
20.在一些实施例中,对于uwb信号发射机的子集,坐标可以相对于同样的全球参考或同样的本地参考被编码。
21.在定位系统的一些实施例中,当移动标签设备进入房间或大厅或建筑的一部分,控制系统进一步可以访问本地参考,本地参考被存储在移动标签设备的本地存储器中和/或被提供在超宽带室内实时定位系统内提供给标签设备。本地参考可以识别房间或大厅或建筑的一部分,以及可以可选地在全球坐标中被给出。
22.在定位系统的一些实施例中,ubw信号发射机可以被配置为在相对于彼此在时间上预设的相应传送时间点传送uwb信号,和/或其中时间戳信息可以被编码在每个uwb信号内并且代表传送的全球时间点。另外或备选地,uwb信号发射机可以包括主信标设备,以及多个信标卫星设备。信标卫星设备的时钟可以基于信标帧的发射被同步,信标帧是由主信标设备以两个连续的信标帧之间的主时间延迟发射的。
23.在定位系统的一些实施例中,信标卫星设备可以被配置为传送连续的信标帧,由
此主时间延迟可以被设置在两个相邻的连续信标帧(bf)内。标签设备可以被配置为接收信标卫星设备的连续的信标帧,以及确定用于从主信标设备以及信标卫星设备发射的帧的到达时间点。控制单元可以被配置为从到达时间点以及表示主信标设备以及多个信标卫星设备的位置的安装位置数据来确定与标签设备的位置相关联的距离值。
24.在定位系统的一些实施例中,标签设备进一步包括:
25.‑
标签时钟,定义了特定于相应的标签设备的标签时间;
26.‑
标签数据存储单元,被配置为在其中存储实时定位系统的主时间延迟数据以及用于实时定位系统的主信标设备以及多个信标卫星设备的位置数据集。标签设备的信号接收单元可进一步被配置为接收按照从主信标设备以及信标卫星设备的至少一个子集被发送的信标帧,以选择主信标设备的一对信标帧,或可选地信标卫星设备之一的一对信标帧,以确定选择的信标帧对的信标帧之间的标签特定的接收时间延迟数据,以及确定从主信标设备以及信标卫星设备的子组中被发送的定位帧的到达时间。标签设备的控制单元还可以被配置为通过比较标签特定的接收时间延迟数据与主时间延迟数据以相对于主时间可选地校准标签时钟。标签设备的控制单元可以进一步被配置为使用确定的到达时间点以及与相应的主信标设备和信标卫星设备的子组相关联的位置数据集来执行到达时间差的分析。
27.在定位系统的一些实施例中,标签设备的控制单元可以进一步被配置为,特别是对于主信标设备以及信标卫星设备的子组的接收的信标帧,基于校准的标签时钟的校准的时间标签,测量相对于与相应主信标设备或信标卫星设备相关联的时隙的相应时间偏移(例如,相对于相应的时隙的开始的时间差)。
28.在定位系统的一些实施例中,标签设备进一步可以被配置为在到达时间差分析中包括由另一个标签设备发送的标签定位帧的到达时间,对于标签定位帧,标签设备接收并在标签数据存储单元中存储位置数据集,位置数据集指示暂时的固定位置。
29.在一些实施例中,实时定位方法进一步可包括编码uwb信号发射机的位置的坐标作为uwb信号中的唯一信息内容的步骤,坐标是相对于全球参考或本地参考给出的。
30.在一些实施例中,实时定位方法可以进一步包括编码相应的uwb信号发射机的标识符作为uwb信号中的唯一信息内容的步骤;以及提供查找表,其中查找表将编码标识符与ubw信号发射机的位置的坐标相关联,ubw信号发射机的位置的坐标是相对于全球参考或本地参考被给出的。
31.在一些实施例中,对于uwb信号发射机的子集,坐标系可以相对于公共的全球参考或公共的本地参考而被编码。
32.在一些实施例中,唯一信息内容可以被选择,用于将位置相关信息提供到定位算法,以及具体地用于在考虑接收的uwb信号的原点的情况下计算到达时间差值。
33.为了概括本文中公开的概念,一种通常的uwb信号的广播可以基于多个(空间地)固定安装单元(例如固定在它们的位置的发射机或接收机)被连续地执行。这些固定单元发送在时间上同步的uwb信号,例如,如在上述国际专利申请pct/ib2019/000745描述的同步时间戳。移动标签设备接收uwb信号并且测量到达时间。测量的到达时间点与来自不同固定的静止单元的uwb信号的时间距离相关。例如,为了允许移动标签设备基于tdoa算法计算它的自己的位置,固定单元的精确位置被使用。
34.因此,在本文中提出的uwb定位系统进一步基于良好定义的固定设备的位置。用于
实施室内定位系统,发明人认识到作为一个目标,需要向移动标签设备传达位于室内环境,即,在大厅或房间内的那些固定设备的位置,以及代表用于uwb信号的定位算法的空间固定设备。(这些固定的设备可以被认为作为gps室外定位系统的gps
‑
卫星的等同物操作)。然而,固定设备的位置因房间到房间/大厅到大厅/室内区域到室内区域而异。在以标签设备为中心的方法中,从固定设备接收信号的任意自定位移动标签设备都必须知道相应地信号传送装置被精确地定位在哪里,以便能够在它的定位计算中使用接收信号。
35.为了提供位置信息,在本文中提出使用uwb信号自身。例如,发射固定单元的全球(地理的)xyz位置可以被包含在uwb信号中,以及因此在uwb信号内传输。
36.例如,发射机身份编码(发射机id,在设备也接收uwb信号例如,用于时钟同步的情况下,也被称为收发机id)通常包括在uwb信号帧内。在一个实施例中,在本文中提出发射机id被修改以包括相应的固定单元的全球xyz位置。
37.当发射机id作为uwb信号帧的一部分被传送以及固定单元的位置根据定义在空间上是唯一的。在另一个实施例中,提出了向移动标签设备提供关于至少这些固定单元的位置信息,移动标签设备原则上可以从这些固定单元接收uwb信号,即,这些固定单元在标签设备的更近的周围(在房间或大厅的一部分内)。这种依靠标签设备的位置为发射机id提供位置信息的方法,可能没有给uwb信号本身增加任何附加有效载荷,即,它不扩展信号帧。相反,当在移动标签设备本身执行时,本方法使得位置信息可用于定位算法。
38.通过提供同步的时间戳以及额外使得固定设备的位置在uwb信号内可用,定位系统可以有效地运行,因为任何新的移动标签设备自动地(进入,例如房间)被使能以在没有任何附加的信息或任何ubw响应信号的交换的情况下计算它的(自己的)位置。
39.在本文描述的实施例中,其中xyz位置与发射机id一起存储在移动标签设备的存储器装置中,定位过程可以参考在存储器设备中用于发射机id的条目(一旦发射机id被接收以及从uwb信号中提取)并且读取存储在表中的不变的固定的静止单元的存储的xyz位置。
40.在一些定位系统的实施例中,例如,如描述的自同步的定位系统,在上面提到的国际专利申请pct/ib2019/000745中可能包括部件,例如主信标设备、可选信标中继器设备以及移动信标设备。部件主信标设备以及信标卫星设备被配置为发送和/或接收帧例如超宽带fr帧(uwb帧),而移动标签设备被配置为接收帧。
41.部件的时钟校准,特别是主信标设备的时钟校准,卫星信标设备,可选地移动标签设备、以及可选地任何信标中继器设备可以用连续的校准信标帧来执行。对于示例性的校准过程,再次参考上述国际专利申请pct/ib2019/000745,“校准和计算单元”部分以及详细说明的相应部分。也在移动标签设备处使用校准的时钟,到达时间信息可以被导出,这可以用于到达时间差分析。
42.在本文中公开的概念可以提供非常灵活的高性能定位系统,因为可以用于类似gps但是室内的方式,时间戳信息连同关联于时间戳信息的预定义位置信息。在本文中描述的一些实施例中,定位过程可以在没有向uwb信号的uwb帧添加进一步的有效载荷的情况下被实施。在本文公开的概念在运行定位系统时允许高效率以及可以消除一旦新的移动标签设备进入定位区域就进行设置任务的需要。
43.本公开的其他特征以及方面从下面的描述以及附图中可以是显而易见的。
附图说明
44.附图在本文中被包括以及构成说明书的一部分,阐述本公开的示例性实施例以及,和描述一起,用于解释本公开的原理。在附图中:
45.图1a示出了用于以标签设备为中心定位的定位系统的示意图;
46.图1b示出了主信标设备或信标卫星设备的示意图;
47.图1c示出了移动标签设备的示意性图;
48.图2a示出了三个相邻的房间的示意性平面图,示出了在每个房间内的固定单元的示例性安装。
49.图2b示出了在图2a中的平面图的一个房间的墙上的透视图。
50.图3a到3c示意性示出在标签设备为中心的定位协议期间执行的各种动作;以及
51.图4示出了定义在移动标签设备处执行的用于自定位过程的流程图。
具体实施方式
52.下文是本公开的示例性实施例的具体描述。文中描述的示例性实施例以及在附图中示出的旨在教导本发明公开的原理,使得本领域普通技术人员能够在许多不同环境以及多个不同应用中实施以及使用本公开。因此,示例性实施例将不旨在,以及不应被认为是,在专利保护范围内的限制性描述。另外,专利保护范围应是被附加权利要求所定义的。
53.本公开部分基于以下认识:当实施室内实时定位系统(rlts)时,在房间/大厅/发射机特定或接收机特定的区域之间的灵活的转换需要被考虑以及启用。本文提出的概念可以在设备为中心的方法中使用时间戳同步以及位置信息来实施,该位置信息在移动标签设备处可用,特别是用于室内环境,该室内环境使用固定单元的子集覆盖多个子区域。
54.鉴于这些方面,新的室内定位系统被提出,用于灵活的定位,特别是在属于定位系统的复杂的室内区域内。本文提出的uwb协议基于采用uwb帧格式,该帧格式优选地具有短的尺寸以及允许有效的uwb帧通信的uwb定位帧格式。
55.如在上述国际专利申请pct/ib2019/000745的“uwb(定位)协议”部分描述的,“uwb(定位)协议”部分特别地通过引用并入本文,uwb定位率帧格式可以定义时隙,例如,用于从诸如主信标设备以及多个信标卫星设备的多个uwb信号发射机发射的uwb帧。(本领域技术人员将理解,仅时隙的信标部分被使用(或甚至被需要)用于本文公开的概念,其不依靠标签应答)。此外,uwb定位率帧格式可以特别地启用uwb信号的同步时间戳。例如,基于时钟同步以及预先分配的间隙,标签设备可以与唯一定时参考相比进一步可选地调整它的定时,因此允许到达时间点的高精度测量。
56.参考在上述提到的国际专利申请pct/ib2019/000745中的“uwb通信基础”以及“uwb频率范围”部分,这些部分在此通过引用被特别地并入,本文公开的概念涉及在射频范围内的uwb信号传送,使用(例如,连续重复的)按照uwb协议的脉冲uwb信号的定位传送。例如,uwb信道可以被用在从3ghz到10ghz的范围内,例如,在从3.244ghz到4.742ghz或从5.944到10.234ghz的范围内。uwb信道的示例性定义在标准“ieee standard 802.15.4
‑
2015
‑
standard for low
‑
rate wireless networks”中给出,例如,信道1:3.5ghz、信道2:4ghz、信道3:4.5ghz、信道4:4ghz 1ghz带宽。每个uwb信号可以被按照uwb帧格式被发射。(uwb信号因此被称为uwb帧)。uwb脉冲可能具有,例如,1ghz的宽带宽以及低能量
‑
43dbm/
hz。单一uwb脉冲可以具有例如,0.3ns到10ns例如3ns(例如,1ns在1ghz以及2ns在500mhz)的时间持续期间。uwb脉冲以uwb脉冲重复率被发射。相应的uwb脉冲重复频率通常可以在从几十赫兹到几百赫兹例如500mhz的范围内。示例性uwb脉冲重复频率是60ns或64ns或65ns,对应于大约16.666mhz或15.625mhz或15.385hz的脉冲重复频率。
57.uwb帧格式定义uwb信号的结构以及内容。uwb帧格式可以包括定义的部分例如:
58.‑
具有前导码以及开始帧定界符(sfd)的同步头(shr)
59.‑
物理层头(phr),具有关于帧长度、数据率的信息,以及具有诸如循环冗余检查(phr crc)或前向纠错(fec phr)的校正部分;物理层头被用于解码phy有效载荷;
60.‑
具有有效载荷以及有效载荷校正(有效载荷crc以及有效载荷fec)的物理层(phy)有效载荷;数据嵌入在有效载荷中。(也参考上面提及的国际专利申请pct/ib2019/000745的关于“图2”的细节描述,该国际专利申请特别通过引用并入本文)。
61.在有效载荷中嵌入的数据可以包括,除了标准条目例如帧的类型,相应的uwb信号发射机/发射器的唯一信息内容,例如全球或本地唯一位置信息和/或uwb信号发射机/发射器的标识符(id)。全球或本地唯一位置信息可以编码相应的uwb信号发射机的位置坐标,而坐标可以相对于全球参考或本地参考被给出。在本文中描述的以设备为中心的方法中以及对于由移动标签设备接收的uwb信号,唯一信息内容通常可以涉及主信标设备或信标卫星设备。
62.应当理解,对于本文中公开的概念,开始帧定界符(sfd)可以被用于以高精度检测与帧的接收相关联的时间点(到达时间点)。
63.在下面描述新的uwb协议在定位系统的实现,特别是定位系统的部件。如在本说明书的任何地方使用的,被描述为“单元”的任何特征可以被具体化为例如离散的物理单元、概念的功能单元,例如,存储在存储单元(存储器)中的软件代码(运行程序),通过微处理器和/或在混合硬件/固件结构内执行例程。例如,在本文中公开的“单元”不特别地限制于当前的指导中。例如,本文中公开的“单元”不是特别地限制在当前的教导中。此外,两个或多个“单元”可以被一起集成到单一的物理电路结构(例如,积分单元或结构)中,例如由能够执行特定功能的不同编程代码集(存储指令)控制的cpu当由处理器执行时,例如微处理器或至少是可编程逻辑器件(pld)。
64.因此,权利要求中特别提到的“单元”可以被实施为软件、硬件,和/或硬件和软件二者的结合。特别的单元的具体细节通过说明书被描述,以及特别地在示例性部分向本领域普通技术人员提供充足的信息以识别相应的结构,例如硬件电路或软件编码部分。单元可以包括一个或多个pld例如与一个或多个存储器通信的微处理器。存储器可以存储一个或多个微处理器
‑
可读指令(程序),当其被pld或微处理器执行时,执行例如,tdoa计算。另外,设备例如标签设备、主信标设备、或卫星设备可以包括各种单元,其相互作用以执行需要的动作,例如接收和/或传送uwb信号,识别ubw帧的定时特征,执行时钟校准,等等。
65.本文提出的rtls包括需要的部件以执行与uwb定位协议一致的动作。特别是,定位系统包括在预置在3d空间中的预设位置发射uwb信号(uwb信号发射机例如主信标设备以及信标卫星设备)的部件(例如结构单元,设备,系统)。定位系统进一步包括移动标签设备,其接收uwb信号以及执行距离/定位确定。固定设备可以发射、接收、或二者,即,发射和接收(如集成设备)ubw信号。uwb信号发射机例如固定地安装到墙壁或天花板、或相对于待定位
区域为静止的其他类型的设施。此外,在定位动作期间,非移动标签设备可以至少暂时地充当固定uwb信号发射机,例如,充当信标卫星设备,如果它能够传送uwb信号以及如果它的位置信息在uwb信号内传送。
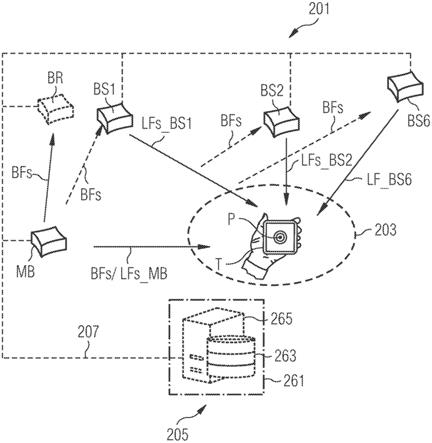
66.参考图1a,(超宽带室内实时)定位系统201的各种部件被示意性示出,例如主信标设备mb,(示例性手持)移动标签设备t,若干信标卫星设备bs1、bs2、bs6以及示例性地信标中继器设备br。
67.关于uwb信号发射机的示例性实施例,参考“主信标设备”部分以及在上述提及的国际专利申请pct/ib2019/000745的以设备为中心的方法的领域内描述技术实施的那些部分,在此通过引用将其具体被并入。关于移动标签设备的示例性实施例,参考“(移动)标签设备”部分以及在上述提及的国际专利申请pct/ib2019/000745的以设备为中心的方法的领域内描述技术实施的那些部分,其具体地通过引用被并入在本文中(例如,见“接收单元”以及“校准以及计算单元”部分)。
68.具体地,标签设备是将被定位在定位系统的定位区域内的单元。优选地标签设备是移动单元,这意味着它不是永久的在同一位置,这使得定位移动单元很有趣。它可以通过附接或成为移动目标的一部分被移动。移动标签设备从多个uwb信号发射机接收uwb信号。标签设备可以包括(信标/信号)接收单元、标签时钟以及(可选的校准以及)计算单元(其包括时间检测单元)、识别单元以及控制单元。标签时钟可以作为时钟脉冲生成器或时钟波生成器被实现。对于主信标设备,一些或全部的元件可以是uwb芯片的一部分。标签设备可以利用信号接收单元接收uwb脉冲,特别是主或(中继器)信标帧。信号接收单元可以包括接收(rx)天线。标签可以放置在壳体内,壳体也包括其他设备例如智能电话、计算机、自动引导车辆的控制系统等。
69.对于tdoa分析,定位系统具有关于主信标设备以及信标卫星设备的位置的信息。
70.在图1a的示例性实施例中,信标卫星设备bs1、bs2、bs6以及信标中继器设备br可以各自包括接收器单元,从而也具有能够与主信标设备mb同步的功能。应注意的是通常主信标设备mb或信标中继器设备br可以被安装在房间或大厅内,通常在被定位系统201覆盖的定位子区域内,以确保传送的uwb信号的时间同步。
71.标签设备t被配置为根据接收的uwb信号(连续地以及优选实时地)确定它在空间内的位置,特别地在定位区域203内的位置。在当前的定位区域内,实时意味着与标签设备的移动速度相比,位置信息可以足够快地导出,使得运动可以时间上被解析到足够的程度。定位区域203由各种部件之间的uwb信号交换的覆盖范围定义。
72.在图1a的实施例中,定位系统201进一步包括(系统)控制单元205,其被连接用于与主信标设备mb以及信标卫星设备bs1、bs2、bs6以及信标中继器设备br进行数据交换。数据连接可以基于线缆207或可以是无线的。因此,部件可以是lan和/或wlan网络或其他通信网络的一部分。控制单元205可以包括集中式计算机系统261(示例性地在图1a示出)或具有数据存储单元263以及计算单元265的分布式计算机系统。数据存储单元263可以存储,例如,在下文提到的主时间延迟数据以及卫星设备的时隙信息,例如,用于时钟同步。
73.另外,uwb信号传送示意性地在图1a示出。主信标设备mb以及信标卫星设备bs1、bs2、bs6传送信标帧bfs/lfs_mb、lfs_lbs1、lfs_lbs2,
…
、lfs_lbs6,这些信标帧可以被在定位区域203内的标签设备t接收。标签设备t处理uwb信号以用于定位。此外,信标卫星设备
bs1、bs2、bs6也可以接收以及处理主信标设备mb的uwb信号(被指示为信标帧bfs)用于时钟校准(见用于示例性校准方法的国际专利申请pct/ib2019/000745)。
74.此外,图1a指示了使用信标中继器设备br以延伸定位系统201的范围(特别是同步)的概念,例如,穿越几个房间。出于这种目的,信标中继器设备br发射覆盖相关区域(通常至少一个房间)的中继器信标帧,在其中信标中继器设备br可以用作主信标设备,例如用于校准。
75.在信标设备被配置为具有用于执行主帧和中继器帧的接收时间点的分析和计算(以及假设标签设备了解每个信标发射机,例如主信标以及中继器信标的精确位置)所需要的充足的计算能力的情况下,标签设备在接收在定位帧格式的预定义的信标部分的时隙处被发送的信标帧时,可以基于主信标设备以及多个信标卫星设备的位置信息,确定在标签设备到主信标设备以及多个信标卫星设备之间距离的距离信息。具体地,基于多个到达时间点,可以在移动标签设备内执行到达时间差分析。
76.图1b示意性示出了示例性固定锚211,例如在图1a中的主信标设备mb或信标卫星设备bs1、
…
。锚211包括壳体213,壳体213例如具有几个通孔215,用于在3d
‑
空间中空间固定的位置紧固螺钉以将锚固定附接到墙上或天花板上。在壳体213内,锚211包括信信标传输单元217,其被配置以执行定位信标帧lfs_mb、lfs_bs1
…
的传输。
77.锚211可以进一步包括主(卫星)时钟219,定义主(卫星)时间。时钟同步可以被执行,基于现有技术方法或与在国际专利申请pct/ib2019/000745中公开的概念一致。在后一种情况,锚211可以进一步包括主(卫星)存储单元211,在存储单元中存储有它的坐标222(本地或全球地),以及可选地主时间延迟数据223,以及用于信标卫星设备的卫星时间延迟数据225以及可选地用于信标卫星设备的校准以及计算单元229。上述的一些或全部的部件(示意性示出于图1b)可以至少部分地被集成在公共uwb芯片内和/或可以被安装于基板或衬底223。
78.图1c示意性示出了移动标签设备241。标签设备可以包括具有显示器以及开口的壳体242,例如,用于附接到一些将被定位的目标。备选地,标签设备可以被集成到一些设备例如自移动目标。
79.标签设备241包括标签时钟243,其定义特定于相应的标签设备241的标签时间。标签设备241进一步包括标签数据存储单元245。标签数据存储单元245可以永久地或在从uwb信号中导出位置数据之后在其中存储位置数据。在可选地被公开在国际专利申请pct/ib2019/000745之中的可用的校准概念中,标签数据存储单元245可以进一步存储主时间延迟数据223。
80.标签设备241进一步包括接收单元249以及(可选的校准以及)计算单元229。接收单元249被配置为uwb帧接收机,以从主信标设备或信标卫星设备中接收信标帧,因此测量相应的到达时间点。计算单元229可以包括时间检测单元229a,该时间检测单元被配置为导出所接收的ubw信号的相应的到达时间点(例如,从标签信标时间点中生成标签特定的接收时间延迟数据251),识别单元229b被配置为从接收的uwb信号(例如,坐标222(本地或全球地))导出唯一信息内容,并且控制单元229c被配置为在定位算法中处理至少uwb信号发射机的子集的唯一信息内容和到达时间点,以导出移动标签设备相对于uwb信号发射机的子集的位置。上述标签设备的部件(示意性的在图1c中示出)可以至少部分地被集成在公共
uwb芯片和/或可以被安装到基板或衬底255上。
81.关于位置数据,数据存储单元245可以存储表示多个uwb信号发射机,特别是主信标设备和/或信标卫星设备的固定信信标传输单元217,的位置(以及可选地也是在每个uwb信号发射机之间的距离)的安装位置数据(例如坐标222)。
82.一旦被控制单元229c测量/确定,数据存储单元245可以进一步从计算单元229接收到达时间差周期,并且至少在计算期间暂时存储到达时间差周期。
83.再次参考图1a到1c以及另外的图2a以及2b,定位方法在本文中被描述,其可以基于以设备中心的解决方案的定位帧率而被操作,该解决方案不需要发射标签响应帧。总之,示例性定位系统的安装包括多个uwb信号发射机(例如,主信标设备mb以及信标卫星设备bs1,
…
)。uwb信号发射机发射由移动标签设备t接收的uwb信号(例如,定位帧lfs_mb,lfs_bs1
…
)。通常,uwb信号发射机可以在定位系统内识别自身。例如,每个uwb信号发射机可以被分配唯一识别码(id)。id可以被包括在传送的uwb信号内(例如,uwb帧格式的物理层有效载荷)以允许接收的uwb信号与相应的uwb信号发射机的关联。
84.如图2a,2b所示,uwb信号发射机mb,bs1,
…
bs9被分布在多个房间r1、r2、r3上。优选地,uwb信号发射机mb,bs1,
…
将整个房间整合到定位系统的定位区域。例如,uwb信号发射机均匀地(或接近均匀地)被分配使得由定位系统提供的定位区域在需要的区域上被延伸,包括,例如,角落或潜在地uwb信号遮蔽区域。uwb信号发射机可以被坚固地安装在限定的位置,例如,对于uwb信号发射机,在房间的角落的特定的高度,如图2b所示。示例性坐标(xmb、ymb、zmb;xs1、ys1,...;xs2、ys2,...;xs3、ys3...)在图2a和2b中被示出。
85.uwb信号发射机在2d空间以及优选地3d空间中的位置可以相对于房间特定的零(参考)点0_r1、0_r2、0_r3被设定。例如,x,y和z坐标可以相对于相应房间的零点被确定(作为本地坐标系的本地原点起作用,因此提供本地坐标)。备选地,全球坐标系可以被使用,因此不需要本地零点,但相对于标准的全球坐标系被给出。
86.uwb信号发射机可以连接到要被供电的电力线(图1a中的电缆207也可以被认为是电力线或作为电力线操作)。优选地,uwb信号发射机可以被进一步连接到中央服务器以交换卫星设备的操作信息。例如,uwb发射机可以被连接到图1a中的中央服务器;关于定位算法而言,这种连接对于以设备为中心的实施来说可以不被认为是必不可少的。
87.通常,uwb信号发射以同步时钟操作。如上文所提到的,时钟同步可以无线的完成,经由线缆诸如以太网、光纤、或经由特定的信标图案(基于信标的同步),如在上面提及的国际专利申请pct/ib2019/000745中所公开的。基于信标的同步在示出的实施例中示意性的被指示,并且结合图1a被描述。具体地,信标卫星设备bs1、bs2、...bs6作为收发器单元被操作,其不仅发射uwb信号而且接收从主信标设备mb发送的信标帧bf的特定图案。基于信标帧bf的图案,信标卫星设备bs1、bs2、...bs6的内部时钟与主信标设备mb的内部时钟同步。类似地,如果需要,标签时钟243也可以被同步,例如,当标签设备本身是暂时固定的时,用于支持其他标签设备的定位。
88.应当承认,主信标设备的信标帧bf可以被实施为uwb信号,即,定位帧lf。
89.主信标设备mb以及信标卫星设备bs1、bs2、...bs6可以关于uwb信号的发射彼此独立运行或可以与在定位帧中的相应时隙相关联。时隙可以启用高度灵活的同步。多个信标卫星设备bs1、bs2、...bs6可以与主信标设备mb直接同步或经由重复信标帧bf的模式的信
标中继器设备br同步,例如,在时间上移动到信标中继器时隙。
90.移动标签设备t包括信号接收单元249以及时间检测单元229a,它们被配置为侦听空间固定的uwb信号发射机,并且检测在定位系统的定位区域内发射的多个定位帧lf的到达时间点。因此,到达时间检测基于移动标签设备t的内部标签时钟243。如所提到的,在一些实施例中,内部标签时钟243可以可选地与uwb信号发射机的时间(即,主信标设备的时间)同步。
91.此外,移动标签设备t包括识别单元229b,识别单元229b被配置以识别被加密在检测的uwb信号内的id。通过id的识别,移动标签设备t还可以识别关联的uwb信号发射机。作为时间检测单元229a以及信号接收单元249的输出结果,输入的时间点以及相关的id被提供到定位算法(在控制单元229c上执行)例如tdoa算法以确定移动标签设备t的位置。
92.为了执行定位算法,移动标签设备t进一步可以包括作为控制单元229c的一部分的微控制单元,接收以及收集关于输入的时间点以及关联的id的信息,并且具有计算能力以及部件以基于定位算法执行定位处理。例如,微控制单元包括处理器,短期存储器以及长期存储器。
93.定位算法基于uwb信号发射机的位置,相应的位置可以在使用uwb信号传送的id内被编码。备选地或附加地,它可以从id结合存储在例如长期存储器中的数据表推导出来。定位算法从uwb信号发射机的位置以及相关的到达时间点计算移动标签设备t在2d空间或3d空间中的位置。
94.微控制器单元可以存储结果,即,在相应的时间点的位置,或将结果传送到控制系统,以用于在生产或后勤的相应的背景下使用位置信息。
95.如上文所述,信号uwb发射机的id可以包括位置信息或提供到相应的uwb信号发射机的位置信息的访问。
96.例如,id可以包括相应的房间r1、r2、r3的房间编号,接着是uwb信号发射机相对于与房间/房间号相关的参考点(零点)的x坐标,然后是y坐标并且然后是z坐标。例如,坐标可以基于5cm或10cm或2cm的增量。通常,增量可以取决于要求的精度或定位系统可达到的精度。在id内以这种方式编码的位置信息保持报头小,同时实现可在其中定位移动标签设备的显著大小的定位空间。
97.在另一实施例,id是全球唯一位置,如在全球地图中定义的。唯一位置可以作为地理坐标系的坐标被给出,其中坐标中的一个坐标代表垂直位置以及坐标中的两个或三个坐标代表水平位置(例如,海拔,纬度和经度)。此外,开放街道地图的坐标可以被使用。尽管地理坐标本身可能更长并且扩大定位帧,但是地理坐标可以具有这样的优点,即任何移动标签设备可以原则上在全世界范围内在装备了遵循标准的uwb信号发射机的任意房间内使用。另一个优点是用于提供id和位置之间的链接或提供参考点的参考位置所需的任何数据存储的独立性。
98.关于uwb信号发射机的网络的安装过程,uwb信号发射机可最初被配备临时id。临时id可以基于例如作为唯一标识符关联到uwb信号发射机的网络接口的媒体访问控制地址(mac地址)。在安装uwb信号发射机后,它的位置被本地确定,例如相对于参考点,或是地理地确定。在查找表247中,id可以与确定的位置相关联。查找表247可以被用来在uwb信号发射机内(即,uwb信号包括重新分配的id)重新分配id。备选地,当在移动标签设备的板上执
行信号分析时,id可以由在查找表247中的位置条目替代。在任何情况下,定位算法可以使用uwb信号发射机的位置被执行。
99.当通过在uwb信号内保持uwb信号发射机的短id来保持定位帧很短时,移动标签设备在通过基于wifi、蓝牙、5g等的通信信道进入房间时,可以接收房间特定的查找表。查找表247可以被存储在标签数据存储单元245中或例如,微处理器单元的存储单元中,或相应数据表可以使用相应的新的数据条目被扩展。
100.作为以设备为中心的定位过程的结果被结合图1a到2b描述,标签设备t的位置p在标签设备t本身处是可用的,并且可以在显示器示出。应当理解相应的标签设备可以被结合在各种类型的移动设备例如自动驾驶/移动车辆,无人机,以及机器人。
101.图1a所示的标签设备t从充足数量的传送主/信标中继器设备接收定位帧。例如,五个tdoa测量可以足够用于在图1c中示出的(可选地校准以及)计算单元229内计算标签设备t在板上的位置。(可选地校准以及)计算单元229被配置为基于(可选地校准的)校准标签时钟的标签时间,测量接收的信标帧相对于关联时隙的相应的时间偏移。
102.在图3a以及3b中,uwb信号lfs_mb,lfs_bs1的传输被示意性示出用于主信标设备mb(图3a;时间线t_mb)以及信标卫星设备(图3b;时间线t_bs1)。在定位帧内关联到相应uwb发射机的时隙1、2、...6内指示位置帧。
103.uwb信号lfs_mb、lfs_bsl以及lfs_bs6在标签设备处的接收在图3c(时间线t_t)中示出。示例性移位x_mb、x_bs1、...x_bs6在与所接收的定位帧相关联的时隙1到6内被示出。在图3c中,如在标签设备t处测量的相应的到达时间toal_t、toa2_t、...toa6_t被示出。基于此,到达时间差分析可以在(可选地校准以及)计算单元229中被执行。到达时间差分析进一步使用传送主信标中继器设备的精确位置的知识(安装位置信息,即,提供对uwb发射机的位置信息的访问的唯一信息内容)。唯一信息内容因此可以被存储在标签设备t的标签数据存储单元中。如果标签设备t,具体地(可选地校准以及)计算单元229,在板上提供充足的计算能力,则可以基本上以定位率周期,即,定位帧lf的传送的接收率,来在线计算位置。
104.因此,位置(标签设备t的位置)可以通过应用tdoa位置计算而被计算。tdoa分析基于本地固定的传送设备的精确位置(主信标/卫星信标,甚至暂时固定于它们位置的标签设备)的知识以及所测量的每个接收的信标帧的相对于相关联的时隙的到达时间差。这种定位方法允许具有快速刷新率以及低延迟的快速位置的确定。这特别适合于定位快速移动目标。
105.根据以标签设备为中心的方法可以理解,定位率帧可以基于信标时隙,仅仅因为不需要标签设备发射标签响应帧。对比之下,基于传输标签设备的定位系统的定位速率可以与可用于传输的信标时隙的数量除以使用可用于传输的信标时隙的标签设备的数量相联系。对于非发射标签设备,可以消除这种依赖性,从而提高定位率。
106.如上文所述,临时固定的校准标签设备可以被用于标签设备t的以设备为中心的定位。例如,图2a中示出的在房间r3内的标签设备t_s可以被操作为固定的uwb发射机,假设它还包括uwb传送单元。如果标签设备t_s的位置已知(以及固定的)以及被传送到标签设备t,则标签设备t_s可以在它(至少暂时地)不改变其在空间中的位置的那些时间段作为临时的固定发射机设备被使用。然后(除了与固定安装的卫星设备相关联的时隙),定位率帧可以包括时隙,该时隙可关联到被用作(暂时)固定信标卫星设备的任意过渡固定标签设备。
107.参考图4所示的流程图,用于提供在标签设备以及rtls的多个标签响应接收单元之间的距离值的方法包括步骤:
108.‑
使用基于定位帧率格式以及uwb帧格式的交换协议传送(步骤407)uwb信号(lfs_
…
),其中定位率帧格式包括信标部分,信标部分包括一系列关联于多个uwb信号发射机的uwb信号发射机的时隙,以确保来自uwb信号发射机的uwb信号的时间同步传送;uwb帧格式包括具有本地/相应地发射uwb信号(lf)的uwb信号发射机的唯一信息内容条目;
109.‑
接收(步骤409)在移动标签设备(t)处的uwb信号(lf);
110.‑
导出(步骤411)相应的接收的uwb信号的到达时间点;
111.‑
从接收的uwb信号中导出(步骤413)唯一信息内容;以及
112.‑
在定位算法中处理(步骤415)唯一信息内容以及至少多个uwb信号发射机的子集的到达时间点,以导出移动标签设备(t)相对于至少uwb信号发射机的子集的位置。
113.此外,步骤可以被包括,例如
114.‑
编码(步骤401)uwb信号发射机的坐标,作为uwb信号中的唯一信息内容,坐标是相对于全球或本地参考被给出的;或
‑
编码(步骤403)相应的uwb信号发射机的标识符,作为uwb信号中的唯一信息内容,以及
115.‑
提供(步骤405)查找表(247),查找表(247)将编码标识符与相对于全球参考或本地参考给出的uwb信号发射机的位置的坐标(222)相关联。
116.其他方面涉及用于在标签设备(t2)以及多个信标发射机之间提供距离值,多个信标发射机包括实时定位系统的主信标设备(mb)以及多个信标中继器设备br,方法包括:
117.操作主信标设备(mb)以传送连续的信标帧(bf),由此在两个相邻的连续信标帧之间设置主时间延迟;
118.操作标签设备(t)和信标中继器设备(br),以接收主信标设备(mb)的连续信标帧,以及(可选地)使用主时间延迟(mtd)校准标签设备(t)和信标中继器设备(br)的时钟;
119.操作信标中继器设备(br)以传送连续的信标帧(bfs_br),由此在两个相邻的连续的信标帧之间设置主时间延迟;
120.操作标签设备(t)以接收连续的信标中继器设备(br)的信标帧(bf),以及确定主信标设备(mb)以及信标中继器设备(br)的标签信标时间点(toal_t、toa2_t、...);以及
121.根据标签信标时间点(toal_t、toa2_t、...)以及安装位置数据确定与标签设备(t2)的位置相关的距离值,该安装位置数据表示主信标设备(mb)以及多个信标中继器设备(br)的位置。
122.在进一步的方面,方法可以包括下列步骤:
123.使用主信标设备的信标传输单元,在第一信标传送时间点传送第一信标帧以及在第二信标传送时间点传送第二信标帧。信标帧之间的时间差被设置,因为两个连续的信标帧以对应于主时间延迟数据的主时间延迟被传送;
124.在标签设备处接收两个连续的信标帧;
125.确定在标签设备处接收两个连续的信标帧的第一信标时间点以及第二标签信标时间点;
126.从第一以及第二标签信标点生成标签特定的接收时间延迟数据;
127.(可选的)通过将标签特定的接收时间延迟数据与相应的主时间延迟数据进行比
较,校准标签设备的标签时间到主信标设备的主时间;
128.从(可选校准的)标签时间的预设标签特定发射时间延迟数据中导出标签特定的发射时间延迟。标签特定的发射时间延迟关联于,例如作为起点(与接收两个连续的信标帧相关联的时间点)的标签信标时间点中的一个;
129.在与两个连续的信标帧的接收相关联的时间点上等待标签特定的发射时间延迟后,从标签设备发射标签响应帧;
130.利用例如在主信标装置mb和/或信标中继器设备内的多个标签响应接收器单元接收从标签设备发射的标签响应帧;
131.确定标签响应帧在相应的标签响应接收单元处的到达时间的多个接收器响应时间点,其中由于标签特定的发射时间延迟,每个接收器响应时间点特定于相应的标签响应接收单元以及标签设备;
132.确定在与两个连续信标帧的传送相关联的时间点与相应响应接收器单元处标签响应帧的到达时间的接收器响应时间点之间经过的路径时间段;
133.通过从确定的路径时间段中减去标签设备的标签特定发射时间延迟来导出累积飞行时间段,其中每个累积飞行时间段与经由标签设备从主信标设备到响应接收器单元中的相应一个的传输路径相关联,
134.从确定的累积飞行时间段以及安装位置数据,确定与选择的标签设备的位置相关联的距离值,安装位置数据可选地表示在多个标签响应接收器单元中的每个标签响应接收器单元与主信标设备的信信标传输单元之间的距离。
135.在另一方面,用于实时定位系统的标签设备被配置为使用定位协议操作,定位协议可选地应用如在权利要求中的一个和/或本文中公开的方面所记载的定位率帧格式,标签设备包括:
136.标签时钟,定义特定于相应的标签设备的标签时间;
137.标签数据存储单元,被配置为在其中存储实时定位系统的主时间延迟数据和实时定位系统的主信标设备以及多个信标中继器设备的位置的位置数据集;
138.接收单元被配置为:
139.‑
接收信标帧,信标帧是从主信标设备以及信标中继器设备的至少一个子组按照定位协议被发送的,
140.‑
选择主信标设备或可选的信标中继器设备中的一个的一对信标帧,
141.‑
确定在选择的一对信标帧的信标帧之间的标签特定的接收时间延迟数据,以及
142.‑
确定从主信标设备以及信标中继器设备的子组发送的信标帧的到达时间;以及
143.(可选的校准以及)计算单元被配置为
144.‑
可选的通过比较标签特定的接收时间延迟数据以及主时间延迟数据,相对于主时间校准标签时钟,以及
145.‑
使用确定的到达时间以及与主信标设备以及信标中继器设备的相应子组相关联的位置数据集,执行到达时间差分析。
146.在一些实施例中,(可选的校准以及)计算单元可以被进一步配置以测量,特别是对于主信标设备以及信标中继器设备的子组的接收的信标帧,基于校准标签时钟的(校准的)标签时间,相对于与相应的主信标设备或信标中继器设备(例如,相关于开始的接收时
隙的时间差)相关联的时隙的相应时间偏移。
147.在一些实施例中,标签设备可以被进一步配置为在到达时间差分析中包括由接收单元接收并由另一个标签设备发送的标签响应帧的到达时间,对于该标签响应帧,标签设备接收并在标签数据存储单元中存储指示另一个标签设备的临时固定位置的位置数据集。
148.尽管文中已经描述了本发明的优选的实施例,改进以及修改可以在不脱离权利要求的范围内被包含。
149.明确指出,说明书和/或权利要求中公开的所有特征旨在为了原始公开的目的,以及为了独立于实施例和/或权利要求中的特征的组成而限制所要求保护的发明的目的而单独和彼此独立地公开。明确指出,实体组的所有值范围或指示,出于原始公开的目的以及出于限制所要求保护的发明的目的,公开了每种可能的中间值或中间实体,特别是作为价值范围的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。