用于优化的组织缝合的组织松弛监测
1.相关申请的交叉引用
2.本技术要求2020年5月21日提交的美国临时申请号63/028,136的申请日的权益。
技术领域
3.本公开整体涉及动力外科缝合装置,并且更具体地涉及包括软件的动力外科缝合装置,该软件利用应变测量来优化组织的缝合和/或切割。
背景技术:
4.动力外科缝合装置包括柄部组件、适配器组件和工具组件,该适配器组件包括支撑在柄部组件上的近侧部分,该工具组件支撑在适配器组件的远侧部分上。工具组件通常包括重新装载组件和砧座组件,该砧座组件相对于重新装载组件可移动地定位以将组织夹持在它们之间。缝合装置还可包括应变仪,该应变仪用于测量被夹持和/或缝合的组织的特性,例如组织厚度、组织压缩等,和/或与钉成形或组织切割相关的参数,例如切割力、击发力等。通常,应变仪被支撑在适配器组件内,并且由可被消毒或再处理以有利于适配器组件的再利用的电子器件形成。此类电子器件是昂贵的。
5.在缝合规程期间,当夹持组织时,许多外科医生在砧座组件和重新装载组件之间达到预先确定的组织间隙之后等待指定的时间段,例如十五秒或更长时间。该等待期为所夹持组织提供了松弛的时间,例如,允许流体从所夹持组织流出进入周围的组织,并且旨在促进创伤较小的钉击发。等待超过所夹持组织达到最佳松弛所需的时间会延长规程时间。相反,如果没有等待足够长的时间来使组织松弛,则可能会不必要地损坏缝合的组织和/或导致钉畸形。
6.因此,具有用于监测组织松弛并指示何时达到最佳组织松弛的装置和方法将是有益的。
技术实现要素:
7.一种圆形缝合装置,该圆形缝合装置包括:柄部组件,该柄部组件包括处理器;适配器组件,该适配器组件可操作地固定到该柄部组件并且包括套管针组件和应变仪组件;可操作地固定到该适配器组件的重新装载组件,该重新装载组件包括钉仓;和砧座组件,该砧座组件可释放地固定到该套管针组件并且相对于该钉仓可移动地定位在间隔位置和夹紧位置之间。该处理器包括用于确定夹持在该钉仓和该砧座组件之间的组织何时已达到预先确定的组织松弛百分比(即,何时所夹持的组织被确定已稳定)的软件。
8.在本公开的某些方面,预先确定的组织松弛百分比介于约1%和约0.5%之间。应变仪组件可包括多个应变仪。软件可被配置为在达到预先确定的组织松弛百分比时激活警报。软件可利用听觉、视觉和/或触觉反馈来警示临床医生。软件可被配置为在达到预先确定的组织松弛百分比时开始缝合序列。软件可被配置为在组织被夹持预先确定的时间段之后激活警报。预先确定的时间可为15秒。软件可被配置为以预先确定的采样速率对夹持力
进行采样。预先确定的采样速率可为400毫秒。
9.一种在缝合规程期间优化组织松弛的方法,该方法包括将组织夹持在砧座组件和重新装载组件之间,计算所夹持组织的组织松弛百分比,以及当该组织松弛百分比等于或小于预先确定的组织松弛百分比时开始缝合序列。
10.在本公开的某些方面,夹持组织包括相对于重新装载组件移动砧座组件,直到在砧座组件和重新装载组件的钉仓之间达到预先确定的间隙。计算组织松弛百分比可包括使用6抽头应变仪历史缓冲区(6
‑
tap strain gauge history buffer)。当所测量的组织松弛百分比介于约0.05%和1%之间时,可开始缝合序列。开始缝合序列可发生在夹持组织完成之后15秒。
11.该方法的各方面还可包括开始切割序列。切割序列可在缝合序列完成时开始。当组织松弛百分比等于或小于第二预先确定的组织松弛百分比时,或者在经过预先确定的时间段之后,以先发生者为准,可开始切割序列。开始切割序列可为自动的。当组织松弛百分比等于或小于预先确定的组织松弛百分比时,或者在经过预先确定的时间之后,以先发生者为准,可开始缝合序列。
附图说明
12.参考附图描述本公开的各个方面和特征,在附图中,在若干视图中的每个视图中,类似的附图标记代表相同或对应的元件,其中:
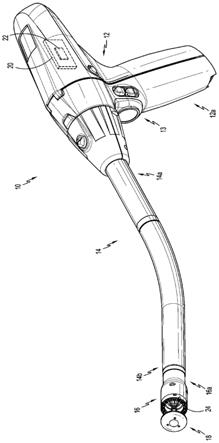
13.图1为根据本公开的各方面的外科缝合装置的侧透视图,该外科缝合装置包括具有应变仪组件的适配器组件;
14.图2为图1所示的适配器组件的侧透视图,其中套管针组件和应变仪组件以虚线示出;
15.图3为图2所示的适配器组件的远侧部分的侧透视图,其中外部套管被移除,并且张力计支撑件与适配器组件分离;
16.图4为图2所示的套管针组件以及应变仪组件的张力计外壳和张力计锚定件的侧透视图;
17.图5为根据本公开的方法的缝合序列的流程图;并且
18.图6为图5所示的流程图中的缝合序列的处理步骤的流程图。
具体实施方式
19.现在参考附图详细描述用于优化组织缝合的装置和方法,其中若干视图的每个视图中类似的附图标记代表相同或对应的要素。如本文所用,术语“远侧”是指部件的距使用者较远的部分,而术语“近侧”是指部件的较靠近使用者的部分。此外,术语“临床医生”通常用于指医务人员,包括医生、护士和支持人员。如本文所用,术语“约”意指数值是近似的,并且微小变化将不会显著影响本公开的所公开方面的实践。在使用数值限制的情况下,除非上下文另外指明,否则“约”意指数值可变化所述值的
±
10%,并且保持在本公开的范围内。
20.下文所述的优化组织缝合的方法利用圆形缝合装置的应变仪组件在缝合规程期间监测应变仪数据,即,夹持力。更具体地,并且如将在下文进一步详细描述的,缝合装置中的软件使用应变仪数据来计算夹持力并以指定采样速率测量夹持力。据此,计算每个数据
样本之间的力的百分比变化。然后,软件通过计算指定量的百分比变化读数范围内的平均百分比变化来应用过滤器。当该平均百分比变化计算值等于或小于指定的组织松弛百分比时,鼓励临床医生开始击发序列。如果平均百分比变化值在经过预先确定的时间段(例如,十五秒(15s))之前不等于或小于组织松弛百分比指定值,则鼓励临床医生在经过预先确定的时间段之后开始击发序列。
21.图1示出了圆形缝合装置10,该圆形缝合装置包括柄部组件12、细长主体或适配器组件14、可释放地支撑在适配器组件14上的重新装载组件16,以及砧座组件18,该砧座组件被可释放地支撑以相对于重新装载组件16在打开位置(图1)和夹紧位置(未示出)之间移动。虽然将参考圆形缝合装置描述用于优化组织缝合的方法,但是可以设想,可修改本公开的各方面以用于具有另选构型的外科缝合装置。
22.圆形缝合装置10被示为电动缝合装置,该电动缝合装置包括可支撑一个或多个电池(未示出)的电动柄部组件12。适配器组件14将电力分别从柄部组件12转换到重新装载组件16和砧座组件18,以缝合和切割组织。电动缝合装置的示例可见于美国专利9,055,943和9,023,014以及美国公布2018/0125495和2017/0340351中。另选地,可以设想,本公开的各方面可结合到缝合装置中,该缝合装置被配置用于与例如美国专利9,962,159中所公开的机器人系统一起使用,并且不包括柄部组件。
23.圆形缝合装置10的柄部组件12包括固定握把12a,该固定握把支撑致动按钮13,以用于控制圆形缝合装置10的各种功能的操作,包括例如重新装载组件16和砧座组件18的接近、来自重新装载组件16的钉的击发以及组织的切割或取芯。
24.处理器20设置在柄部组件12内并且包括存储器芯片22或可操作地连接到该存储器芯片。存储器芯片22可包括易失性、非易失性、磁性、光学或电子介质中的一种或多种,诸如只读存储器(rom)、随机存取存储器(ram)、电可擦除可编程rom(eeprom)、非易失性ram(nvram)或闪存存储器。处理器20可为适于执行本公开中所述的操作、计算和/或指令集的任何合适处理器(例如,控制电路),包括但不限于硬件处理器、现场可编程门阵列(fpga)、数字信号处理器(dsp)、中央处理单元(cpu)、微处理器以及它们的组合。本领域技术人员应当理解,可以通过使用适于执行本文所述的算法、计算和/或指令集的任何逻辑处理器(例如,控制电路)来代替处理器。
25.适配器组件14包括能够可释放地联接到柄部组件12的近侧部分14a。重新装载组件16包括可释放地联接到适配器组件14的远侧部分14b的近侧部分16a。钉仓24支撑在重新装载组件16的远侧部分16b上并且支撑多个外科钉(未示出)。套管针组件26支撑在适配器组件14的远侧部分14b内,并且延伸穿过重新装载组件16。套管针组件26包括用于相对于重新装载组件16可释放地固定和定位砧座组件18的套管针构件28。
26.图2至图4示出了支撑在适配器组件14的远侧部分14b(图2)内的应变仪组件30,以及通过应变仪组件30接收并由该应变仪组件支撑的套管针组件40。应变仪组件30定位在套管针组件40和重新装载组件16之间。利用应变仪组件30提供的应变仪数据,可计算重新装载组件16的钉仓24与砧座组件18之间的夹持力。套管针组件40将砧座组件18(图1)可释放地固定到圆形缝合装置10,并操作以相对于重新装载组件16推进和回缩砧座组件18。柄部组件12中的软件使用应变仪测量值来确定随时间推移的夹持力。如将在下文进一步详细描述的,当夹持力(即,组织上的力)稳定时,发生组织松弛。
27.应变仪组件30包括张力计外壳32、张力计锚定件34和张力计支撑件36(图3)。多个应变仪38支撑在张力计外壳32的延伸部分32a(图4)上。对于示例性应变仪组件的详细描述,请参考2020年3月4日提交的美国专利申请序列号16/809,023。虽然示出为应变仪组件30,但是可以设想,可修改本公开的方法以与任何应变仪组件一起使用。
28.图5示出了根据本公开的各方面的用于优化组织缝合的缝合规程的流程图。首先,待缝合的组织(未示出)定位在砧座组件(例如,砧座组件18(图1))和重新装载组件(例如,重新装载组件16(图1))的钉仓(例如,钉仓24(图1))之间。然后将砧座组件朝向重新装载组件接近,以将组织夹持在砧座组件和重新装载组件的钉仓之间。将砧座组件朝向重新装载组件接近,直到在砧座组件和钉仓之间达到预先确定的夹持间隙。
29.由应变仪组件(例如,应变仪组件30(图2))提供的应变仪数据用于计算组织松弛百分比,或者更具体地,计算两个采样点之间的夹持力的百分比变化。当所夹持组织内的压缩流体已经能够流入相邻组织中时(即,夹持力稳定时),发生组织松弛。当组织松弛百分比等于或小于预先确定的组织松弛百分比(通常为0.5%
‑
1.0%)时,或者在经过十五秒之后,以先发生者为准,确定已发生组织松弛。在本公开的各方面,软件被配置为在已发生最佳组织松弛时通过听觉、视觉和/或触觉反馈来警示临床医生并且开始缝合序列。在本公开的某些方面,缝合规程可在砧座组件和钉仓达到夹持间隙距离之后的任何时间开始。还可以设想,软件可被编程为在达到组织松弛百分比或经过15秒后自动开始缝合序列。
30.在缝合序列之后,开始组织切割或取芯序列。切割序列可为自动的,或者可由临床医生手动开始。切割序列可与缝合序列同时地、直接在缝合序列完成之后或在随后的时间段之后开始。
31.在本公开的某些方面,在开始切割序列之前,也可使用类似于上述组织松弛优化的组织松弛优化,以使在缝合组织的切割/取芯期间的组织损伤最小化。这样,在缝合序列完成之后和切割序列开始之前,柄部组件中的软件根据应变仪组件所提供的应变仪数据计算组织松弛百分比。与缝合序列一样,一旦组织松弛百分比等于或小于预先确定的组织松弛百分比,或者经过预先确定的时间段,以先发生者为准,就警示临床医生可开始切割序列。可以设想,切割序列可自动开始。
32.在进一步优化组织缝合的尝试中,可以设想,应变仪组件可与软件结合使用,以监测组织夹持期间的夹持力。在夹持力超过预先确定的阈值的情况下,软件可降低组织被夹持的速度,或完全停止夹持,直到夹持力降至阈值以下。
33.图6是详细说明组织松弛优化规程的流程图。尽管使用以指定采样速率更新的6抽头应变仪历史缓冲区来示出,但是可以设想,可利用多于或少于6抽头应变仪历史缓冲区。在本公开的一个方面,采样速率是400毫秒间隔。
34.在缓冲区充满之后,减去连续的应变仪值以计算力的微分变化,然后除以先前的绝对应变仪值,以确定施加到组织的力的百分比变化。这产生五(5)个δ百分比值,然后对其取平均值。在下一个时间段,缓冲区中的所有值向下移位,并且新值被置于sgft0槽(slot)中。这样,在计算中仅使用最后五个值。当完成新计算时,最旧的值被丢弃并且不形成新计算的一部分。当平均δ百分比值小于或等于指定的组织松弛百分比时,确定组织为松弛的并且鼓励使用者开始击发。如上所述,在本公开的某些方面,在约0.5%和约1.0%之间的组织松弛百分比下,组织被认为是充分稳定的,并且力不可能进一步显著变化。
35.6抽头应变仪历史记录为sgft5、sgft4、sgft3、sgft2、sgft1、sgft0。
36.δ百分比(dp)如下计算:
[0037][0038][0039][0040][0041][0042]
减少百分比(pr)通过如下对δ百分比取平均值来确定:
[0043][0044]
如上所述,如果在15秒内未检测到预先确定的组织松弛百分比,则确定组织为松弛的并且鼓励使用者开始击发。
[0045]
上述装置和方法允许临床医生作出关于所夹持组织是否已松弛至使组织损伤最小化的程度的更明智的决定。该软件还允许收集组织松弛数据,该数据可在稍后分析,以更好地理解组织在实际击发中在夹持之后和击发之前的表现。
[0046]
本领域的技术人员将会理解,本文具体描述并在附图中示出的装置和方法是非限制性的和示例性的。可以设想,在不脱离本公开的范围的情况下,结合本公开的一个方面示出或描述的元件和特征可与另一个方面的元件和特征组合。同样,本领域的技术人员将基于上述方面理解本公开的另外的特征和优点。因此,本公开不受已具体示出和描述的内容的限制,除非由所附权利要求书指出。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。