1.本发明有关于识别标签读取,特别是关于一种识别标签读取系统。
背景技术:
2.生产流水线末端的产品装箱作业,需要分别记录包装各产品内盒的产品条码,以及外箱的外箱条码,以进行条码绑定予以记录,对库存及物流进行妥善管理。
3.生产流水线末端的作业方式是采取人工作业。亦即,条码的读取,都是由人员逐一以手持读取器读取,再进行外箱封箱,移入仓储或出货站。
4.前述手工读取速度慢而影响装箱效率。若末端包装速度太慢而无法跟上前端生产速度,只能关闭流水线停止前端产出。待消化堆积产品后再重启流水线生产,而致使包装效率间接影响到实际生产效率。
技术实现要素:
5.本发明所要解决的技术问题是提供一种识别标签读取系统,可以通过测距装置检测顶部标签读取装置的高度,升降顶部标签读取装置,以确保顶部标签读取装置可以清楚获取内盒识别标签。同时,通过检测距离值的变化,本发明识别标签读取系统可以排除折叠上盖对升降高度的干扰,而确实地以内盒的顶面高度为依据控制升降平台,使得顶部标签读取装置可以被升降到正确高度。因此,应用本发明的识别标签读取系统,可以适应即时的外箱及内盒尺寸变化。
6.为了实现上述目的,本发明提供了一种识别标签读取系统,用以读取一或多个识别标签。
7.识别标签读取系统包含一输送平台、一顶部标签读取装置、一测距装置、一升降平台以及一控制模块。
8.输送平台具有一入料端以及一出料端;输送平台用于持续沿一输送方向由入料端朝向出料端进行输送;输送平台具有一第一侧边以及一第二侧边,且第一侧边以及第二侧边平行于输送方向。
9.顶部标签读取装置用以朝输送平台执行一顶部标签读取作业。
10.测距装置用于朝向输送平台检测一检测距离值。
11.升降平台对应于第一侧边或第二侧边配置;顶部标签读取装置以及测距装置设置于升降平台,且位于输送平台上方;其中升降平台用以于一高度方向移动顶部标签读取装置以及测距装置,高度方向垂直于输送方向以及水平方向。
12.控制模块设定有一高点距离值、一中间距离区间以及一低点距离值,且高点距离值大于低点距离值,且中间距离区间介于高点距离值以及低点距离值之间;且控制模块于接收一触发信号后,控制升降平台朝向输送平台移动顶部标签读取装置及测距装置,并接收检测距离值。
13.其中,当检测距离值大于高点距离值,控制模块持续控制升降平台朝向输送平台
移动顶部标签读取装置及测距装置;以及当检测距离值变更为中间距离区间或小于低点距离值其中之一时,控制模块在每一次变更时进行计数而对计数值加一;控制模块于计数值为二时停止升降平台,并驱动顶部标签读取装置执行顶部标签读取作业。
14.于至少一实施例中,识别标签读取系统更包含一定位感应器以及一线性致动器;定位感应器设置于第一侧边,且线性致动器设置于第二侧边且对应于定位感应器;其中,线性致动器用以沿垂直于输送方向以及高度方向的一水平方向,朝向第一侧边进行线性致动;且当定位感应器被触发,定位感应器产生触发信号并传送至控制模块。
15.于至少一实施例中,识别标签读取系统更包含一入料感应器,设置于入料端,用于感应一物件是否位于入料端;当入料感应器感应到物件,控制模块控制线性致动器进行线性致动。
16.于至少一实施例中,识别标签读取系统更包含一侧向标签读取装置,对应于第一侧边配置,用于在水平方向上朝向第二侧边执行一侧向标签读取作业。
17.于至少一实施例中,识别标签读取系统包含有两个或两个以上的侧向标签读取装置,且各侧向标签读取装置在高度方向上具有不同的高度。
18.于至少一实施例中,相邻的该些侧向标签读取装置的视野局部重叠,且控制模块以该些侧向标签读取装置其中之一执行侧向标签读取作业。
19.于至少一实施例中,识别标签读取系统更包含一辅助升降平台,用以于高度方向上向上或向下移动侧向标签读取装置。
20.于至少一实施例中,控制模块依据顶部标签读取作业以及侧向标签读取作业,分别取得一外箱识别信息以及一内盒识别信息,并且关联外箱识别信息以及内盒识别信息。
21.于至少一实施例中,识别标签读取系统更包含一出料感应器,设置于出料端,用于感应一物件是否位于出料端;当出料感应器感应到物件,控制模块控制升降平台上升复位,并重置计数值。
22.于至少一实施例中,输送平台包含一框架、多个输送滚筒以及一驱动马达,该些输送滚筒枢接于框架,并且依序沿输送方向互相平行配置,驱动马达设置于框架,并且直接地或间接地连接于该些输送滚筒,该驱动马达用以驱动该些输送滚筒。
23.于至少一实施例中,测距装置的位置接近入料端,而顶部标签读取装置的位置接近出料端。
24.于至少一实施例中,顶部标签读取装置与测距装置之间具有一高度差,控制模块以高度差修正测距装置取得的一实际距离,以得到检测距离值。
25.本发明的有益功效在于:识别标签读取系统可以通过测距装置检测顶部标签读取装置的高度,升降顶部标签读取装置,以确保顶部标签读取装置可以清楚获取内盒识别标签。同时,通过检测距离值的变化,本发明识别标签读取系统可以排除折叠上盖对升降高度的干扰,而确实地以内盒的顶面高度为依据控制升降平台,使得顶部标签读取装置可以被升降到正确高度。因此,应用本发明的识别标签读取系统,可以适应即时的外箱及内盒尺寸变化。
26.以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
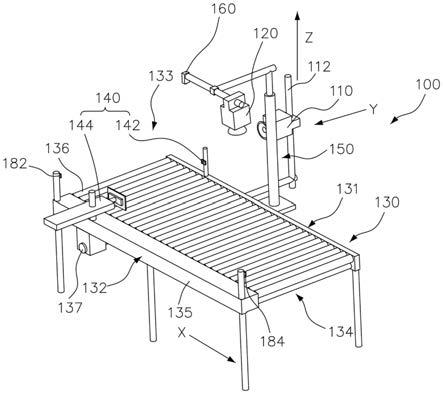
27.图1为本发明第一实施例的立体图。
28.图2为本发明第一实施例的另一立体图,显示承载包含内盒的外箱。
29.图3为本发明第一实施例的电路方块图。
30.图4为应用本发明的外箱及内盒的立体图。
31.图5为本发明第一实施例的前视图。
32.图6为本发明第一实施例的侧视图。
33.图7为本发明第一实施例中,部分元件的侧视图。
34.图8、图9、图10为本发明第一实施例中,检测距离值、高点距离值、中间距离区间、低点距离值以及计数值的示意图。
35.图11为本发明第一实施例的另一前视图。
36.图12为本发明第一实施例的局部立体图。
37.图13(a)、图13(b)以及图13(c)为本发明第一实施例中,检测距离值变化及计数值的关系示意图。
38.图14为本发明第一实施例的另一侧视图。
39.图15(a)、图15(b)以及图15(c)为本发明第一实施例中,检测距离值变化及计数值的另一关系示意图。
40.图16(a)以及图16(b)为本发明第一实施例中,检测距离值变化及计数值的又一关系示意图。
41.图17为本发明第一实施例的又一侧视图。
42.图18为本发明第二实施例的侧视图。
43.图19为本发明第二实施例的另一侧视图。
44.图20为本发明第三实施例的侧视图。
45.其中,附图标记:
46.100:识别标签读取系统
47.110:侧向标签读取装置
48.112:支撑架
49.120:顶部标签读取装置
50.130:输送平台
51.131:第一侧边
52.132:第二侧边
53.133:入料端
54.134:出料端
55.135:框架
56.136:输送滚筒
57.137:驱动马达
58.140:定位装置
59.142:定位感应器
60.144:线性致动器
61.150:升降平台
62.152:线性马达装置
63.154:承载架
64.160:测距装置
65.170:控制模块
66.182:入料感应器
67.184:出料感应器
68.190:辅助升降平台
69.200:外箱
70.200a:容置空间
71.210:外箱识别标签
72.211:第一侧面
73.212:第二侧面
74.213:顶部开口
75.214:折叠上盖
76.300:内盒
77.310:顶面
78.320:内盒识别标签
79.d:高度差
80.high:高点距离值
81.go:中间距离区间
82.low:低点距离值
83.sfis:生产现场管控系统
84.x:输送方向
85.y:水平方向
86.z:高度方向
87.z0:初始高度
88.z1:第一距离值
89.z2:第二距离值
90.za:实际距离
91.zd:检测距离值
具体实施方式
92.以下说明使用的术语「模块」是指专用集成电路(asic)、电子电路、微处理器,执行一个或多个软件或固件程序的芯片、电路设计。模块被配置为执行各种算法、变换和/或逻辑处理以生成一或多个信号。当模块以软件实现时,模块可以作为芯片、电路设计可读取的程序码而通过程序码执行实现于存储器中。
93.下面结合附图对本发明的结构原理和工作原理作具体的描述:
94.参阅图1、图2、图3以及图4所示,为本发明第一实施例所提供的一种识别标签读取
系统100,用以读取一外箱200的一外箱识别标签210以及容置于外箱200内的至少一内盒300的一内盒识别标签320。
95.如图2以及图4所示,外箱200内部具有一容置空间200a,且外箱200更包含相对的一第一侧面211以及一第二侧面212、一顶部开口213以及多个折叠上盖214。容置空间200a位于第一侧面211以及第二侧面212之间,且外箱识别标签210位于第一侧面211。顶部开口213连通容置空间200a,且对应于第一侧面211以及第二侧面212顶部边缘。多个折叠上盖214延伸于顶部开口213边缘,且常态地维持垂直于内盒300的形态。内盒300容置于容置空间200a,且具有一顶面310,顶面310对应于顶部开口213,且内盒识别标签320位于顶面310。其中,外箱识别标签210具有外箱识别信息,且内盒识别标签320具有内盒识别信息。
96.如图1、图2以及图3所示,识别标签读取系统100包含一输送平台130、一定位装置140、至少一侧向标签读取装置110、一升降平台150、一顶部标签读取装置120、一测距装置160以及一控制模块170。
97.如图1、图2、图5以及图6所示,输送平台130具有一入料端133以及一出料端134。输送平台130用于持续沿一输送方向x由入料端133朝向出料端134进行输送。输送平台130具有一第一侧边131以及一第二侧边132,第一侧边131以及第二侧边132平行于输送方向x。前述「第一」、「第二」仅是在区别两个侧边131、132。输送平台130用以承载外箱200,并且沿输送方向x传送外箱200。
98.如图2、图5以及图6所示,于输送外箱200的过程中,外箱200的第一侧面211对应于第一侧边131,且第二侧面212对应于第二侧边132。外箱200的顶部开口213朝上开启,而外露内盒300的顶面310。
99.识别标签读取系统100更包含一入料感应器182以及一出料感应器184。入料感应器182设置于入料端133,且出料感应器184设置于出料端134。其中,入料感应器182用于感应一物件,例如外箱200,是否位于入料端133,且出料感应器184用于感应一物件,例如外箱200,是否位于出料端134。于一具体实施例中,入料感应器182以及出料感应器184可分别为光学感应器、超声波感应器、微动开关,或任何可被外箱200以接触或非接触方式触发的感应器。
100.如图1所示,在一具体实施例中,输送平台130包含一框架135、多个输送滚筒136以及一驱动马达137。框架135用以提供沿输送方向x配置的一承载区。多个输送滚筒136枢接于框架135,并且依序沿输送方向x互相平行配置。驱动马达137设置于框架135,并且直接或间接地连接于该些输送滚筒136。输送滚筒136用于承载外箱200,控制模块170可控制驱动马达137启动,借以使得驱动马达137持续转动而驱动该些输送滚筒136,以沿着输送方向x将外箱200由入料端133朝向出料端134输送。前述框架135、多个输送滚筒136以及驱动马达137的组合仅为输送平台130的示例,不排除其他具有线性传送功能的输送机构。此外,输送平台130不一定受到控制模块170控制,输送平台130的启动可由独立开关装置进行切换,并且于启动后匀速进行传送。
101.如图1、图2、图5以及图6所示,定位装置140包含一定位感应器142以及一线性致动器144。定位感应器142设置于第一侧边131,且线性致动器144设置于第二侧边132,并且对应于定位感应器142配置。定位感应器142以及线性致动器144大致上对应于入料端133配置,亦即,定位感应器142以及线性致动器144的位置接近入料端133而远离出料端134。
102.如图5以及图6所示,线性致动器144用以沿垂直于输送方向x以及高度方向z的一水平方向y朝向第一侧边131进行线性致动。因此,线性致动器144执行线性致动时,可以接触外箱200的第二侧面212并推动外箱200。当外箱200触发定位感应器142,特别是以第一侧面211触发定位感应器142,定位感应器142产生触发信号并传送至控制模块170。定位装置140用于使外箱200的第一侧面211与输送平台130的第一侧边131平齐,固定第一侧面211与侧向标签读取装置110在水平方向y上的距离,以利于后续侧向标签读取装置110的的标签读取作业。在一具体实施例中,线性致动器144为一气压缸装置,但不排除其他可进行线性致动的装置。定位感应器142可以是接触式感应器,例如微动开关,在受到物件碰触后被触发。定位感应器142也可以是非接触式感应器,于物件接近到一门槛距离后被触发。
103.如图1、图2、图5以及图6所示,侧向标签读取装置110对应于第一侧边131配置。侧向标签读取装置110用于在水平方向y上朝向第二侧边132执行一标签读取作业。侧向标签读取装置110的视野(fov,field-of-view)大致位于输送平台130的上方,以读取位于外箱200的第一侧面211的外箱识别标签210。
104.于水平方向y上,侧向标签读取装置110与第一侧边131之间的距离,大致匹配侧向标签读取装置110可对焦的距离,使侧向标签读取装置110可以正确地读取位于第一侧面211的外箱识别标签210。
105.如图1、图2、图5以及图6所示,于第一实施例中,识别标签读取系统100更包含一支撑架112,连接于框架135且对应于第一侧边131设置。侧向标签读取装置110设置于支撑架112,以维持侧向标签读取装置110位于一固定高度,使外箱识别标签210位于侧向标签读取装置110的视野之中。
106.如图1、图2、图5以及图6所示,升降平台150对应于第一侧边131或第二侧边132配置。升降平台150可以固定于框架135,也可以是独立的装设。顶部标签读取装置120以及测距装置160设置于升降平台150,且位于输送平台130上方。升降平台150用以于高度方向z同时移动顶部标签读取装置120以及测距装置160,使顶部标签读取装置120以及测距装置160向上远离或向下接近输送平台130。顶部标签读取装置120常态地位于一初始高度z0。前述高度方向z垂直于输送方向x以及水平方向y。前述测距装置可以是激光测距器或声波测距器。
107.如图7所示,顶部标签读取装置120用于朝向输送平台130执行一顶部标签读取作业。因此,当外箱200移动至顶部标签读取装置120下方时,顶部标签读取装置120可读取位于内盒300的顶面310的内盒识别标签320。测距装置160用于朝向升降平台150检测一检测距离值zd。
108.在一具体实施例中,于高度方向z上,顶部标签读取装置120与测距装置160大致上位于相同高度,且测距装置160的位置接近入料端133而顶部标签读取装置120的位置接近出料端134;此时,测距装置160所检测到的实际距离za,即为检测距离值zd。在不同实施例中,顶部标签读取装置120与测距装置160之间具有一高度差d,控制模块170利用高度差d修正测距装置160所检测到的实际距离za,以得到检测距离值zd,使得检测距离值zd可用于顶部标签读取装置120的对焦作业。
109.如图7所示,于一具体实施例中,升降平台150可包含一线性马达装置152以及一承载架154。线性马达装置152设置于第一侧边131或第二侧边132,承载架154连接于线性马达
装置152,且顶部标签读取装置120与测距装置160同时设置于承载架154。通过线性马达装置152的线性输出,而在高度方向z上移动承载架154,借以改变顶部标签读取装置120以及测距装置160至输送平台130的距离。在不同实施例中,线性马达装置152可由气压缸、导螺杆总成、齿轮及齿条组合或其他可进行线性致动的装置所替换。
110.如图3所示,控制模块170电性连接于侧向标签读取装置110、顶部标签读取装置120、输送平台130、定位装置140、升降平台150、测距装置160、入料感应器182以及出料感应器184。控制模块170所执行的控制作业具体说明如下。
111.如图8所示,控制模块170中设定有一高点距离值high、一中间距离区间go以及一低点距离值low。高点距离值high大于低点距离值low,且中间距离区间go介于高点距离值high以及低点距离值low之间。
112.如图7所示,于识别标签读取系统100启动后,控制模块170会先控制升降平台150上升至最大高度,使顶部标签读取装置120位于初始高度z0。同时,输送平台130开始进行输送作业。在输送平台130上没有外箱200时,测距装置160所获取到的检测距离值zd,即为初始高度z0,亦即顶部标签读取装置120与输送平台130之间的距离。顶部标签读取装置120的一读取距离范围介于一第一距离值z1与一第二距离值z2之间,且第一距离值z1大于第二距离值z2。顶部标签读取装置120与内盒300的顶面310之间的距离,必须落入第一距离值z1与第二距离值z2之间,顶部标签读取装置120才能正确读取内盒识别标签320。
113.如图3以及图11所示,输送平台130持续朝输送方向x进行输送。当外箱200被移动置于输送平台130的入料端133进行传送,入料感应器182感应到物件(即外箱200)位于输送平台130的入料端133。此时,控制模块170控制线性致动器144作动,使线性致动器144由外箱200的第二侧面212推动外箱200。当定位感应器142接触到第一侧面211,定位感应器142发出触发信号至控制模块170,控制模块170控制线性致动器144停止作动,同时控制模块170控制升降平台150朝向输送平台130移动顶部标签读取装置120及测距装置160,并接收检测距离值zd。此时,外箱200的第一侧面211大致与第一侧边131平齐,使得侧向标签读取装置110与第一侧面211之间维持适当距离,而可读取外箱识别标签210,并传送至控制模块170。外箱识别标签210可为但不限于具有二维条码的贴纸或印刷图案,对应于一外箱识别信息,用于标示各内盒300的一产品种类信息。
114.如图6以及图9所示,当检测距离值zd大于高点距离值high,控制模块170忽略检测距离值zd,并持续控制升降平台150朝向输送平台130移动顶部标签读取装置120及测距装置160。
115.如图10以及图11所示,当检测距离值zd变更为中间距离区间或小于低点距离值其中之一时,控制模块170在每一次检测距离值zd变更区间时进行计数加1。控制模块于计数值为2时停止并锁定升降平台150,并驱动顶部标签读取装置120执行顶部标签读取作业。
116.如图7所示,在外箱200到达测距装置160下方之前,检测距离值zd实际上是测距装置160与输送平台130之间的距离,此时的检测距离值zd大于高点距离值high,因此控制模块170忽略检测距离值zd。
117.如图6以及图12所示,测距装置160会先检测到折叠上盖214的顶缘。此时,测距装置160获取到的检测距离值zd,实际上是顶部标签读取装置120至折叠上盖214的顶缘之间在高度方向z的距离值,而非顶部标签读取装置120与内盒300的顶面310之间在高度方向z
的距离。此时,检测距离值zd的变化有三种状况。
118.以下以具体数据进行说明。但该些数据仅为示例,并非用以限定本发明的实施。在高度方向z上,测距装置160与输送平台130的距离约为80~100cm,折叠上盖214的高度约为20cm。在输送方向x上,定位感应器142到测距装置160的距离约为20~30cm,测距装置160再到顶部标签读取装置120的距离约为20~30cm。输送平台130的输送速度设定为10cm/s,配合升降平台150在高度方向z的下降速度10cm/s。通过定位感应器142、测距装置160及顶部标签读取装置120的位置设置,配合输送平台130及升降平台150的速度,可使测距装置160配合不同大小的外箱200的箱高,而不会在高度方向z上碰撞折叠上盖214,且可避免测距装置160或顶部标签读取装置120距离顶部标签(内盒识别标签320)太近,而使顶部标签读取装置120无法对焦。
119.假设顶部标签读取装置120的读取距离范围介于35~37cm(z1=37cm、z2=35cm),则可设定高点距离值为37cm,中间距离区间为36~37cm,且低点距离值为36cm。
120.如图6以及图13(a)所示,第一种状况是测距装置160检测到折叠上盖214的顶缘时,检测距离值zd仍大于高点距离值high(zd>37cm)。此时控制模块170忽略检测距离值zd,并持续控制升降平台150朝向输送平台130向下移动顶部标签读取装置120及测距装置160。
121.如图14以及图13(b)所示,接着,测距装置160检测到内盒300的顶面310,使检测距离值zd瞬间增加20cm(折叠上盖214的高度)。随着升降平台150的下降,检测距离值zd持续下降。当检测距离值zd由大于高点距离值high(zd>37cm)变更为中间距离区间go时(36cm≦zd≦37cm),控制模块170进行计数加一,此时计数值为一。
122.如图13(c)所示,升降平台150持续下降,检测距离值zd也持续下降。当检测距离值zd由中间距离区间go(36cm≦zd≦37cm)变更为低点距离值low时(zd<36cm),控制模块170再度进行计数加一,此时计数值为二。此时,控制模块170锁定升降平台150,并驱动顶部标签读取装置120执行顶部标签读取作业。
123.如图6以及图15(a)所示,第二种状况是测距装置160检测到折叠上盖214的顶缘时,检测距离值zd已经落入中间距离区间go(36cm≦zd≦37cm)或小于低点距离值low(zd<36cm)。此时控制模块170计数加一,并持续控制升降平台150朝向输送平台130向下移动顶部标签读取装置120及测距装置160。
124.如图14以及图15(b)所示,接着,测距装置160检测到内盒300的顶面310,使检测距离值zd瞬间增加20cm,而再度大于高点距离值(zd>37cm)。
125.如图15(c)所示,随着升降平台150的下降,检测距离值zd再度由大于高点距离值high(zd>37cm)变更为中间距离区间go(36cm≦zd≦37cm),控制模块170再度进行计数加一,此时计数值为二。此时,控制模块170锁定升降平台150,并驱动顶部标签读取装置120执行顶部标签读取作业。
126.如图16(a)以及图16(b)所示,第三种情况是测距装置160检测到折叠上盖214的顶缘时,测距装置160折叠上盖214的顶缘非常接近,例如仅有几cm的距离,而使检测距离值zd小于低点距离值low(zd<36cm),此时控制模块170进行计数加一。接着,测距装置160检测到内盒300的顶面310,检测距离值zd瞬间增加20cm而恰好落入中间距离区间go(36cm≦zd≦37cm)。检测距离值zd在中间距离区间go与低点距离值low之间变更时,控制模块170再度进行计数加一,此时计数值为二。此时,控制模块170锁定升降平台150,并驱动顶部标签读取
装置120执行顶部标签读取作业。
127.此时,控制模块170仍持续控制输送平台130沿输送方向x传送外箱200。当内盒300的顶面310到达顶部标签读取装置120下方时,顶面310与顶部标签读取装置120之间的距离可介于第一距离值z1以及第二距离值z2之间,使得顶部标签读取装置120可以对顶面310进行对焦,而获取内盒识别标签320的图像,并传送至控制模块170。内盒识别标签320可为具有二维条码的贴纸或印刷图案,对应于一内盒识别信息,用于标示各内盒300的一产品序号信息。前述的二维条码可由具有识别特征的其他图像替代。
128.如图3所示,侧向标签读取装置110以及顶部标签读取装置120可为摄影镜头,在顶部标签读取作业以及侧向标签读取作业中分别获取顶面310以及第一侧面211的图像,传送至控制模块170,以供控制模块170分析外箱识别标签210以及内盒识别标签320,分别取得外箱识别信息以及内盒识别信息。或是,侧向标签读取装置110以及顶部标签读取装置120可为条码读取器,于扫描到外箱识别标签210以及内盒识别标签320时可直接解析外箱识别信息以及内盒识别信息,并传送至控制模块170。控制模块170关联外箱识别信息以及内盒识别信息,即可整合该些信息,传送至一生产现场管控系统(shop floor information system,sfis)进行储存,以建立出货产品记录。
129.如图3以及图17所示,输送平台130持续将外箱200朝向出料端134输送,当出料感应器184感应物件(即外箱200)位于输送平台130的出料端134,控制模块170控制升降平台150上升复位至最大高度,使顶部标签读取装置120位于初始高度z0;控制模块170重置计数值。已经完成扫描的外箱200则继续被输送至下一工作站位,以供进行折盖封箱等后续作业,。
130.请参阅图18以及图19所示,为本发明第二实施例所提供的一种识别标签读取系统100。第二实施例的识别标签读取系统100包含有两个或两个以上的侧向标签读取装置110,分别设置于支撑架112上。各侧向标签读取装置110在高度方向z上具有不同的高度,使得各侧向标签读取装置110的视野涵盖不同的高度范围,且相邻的侧向标签读取装置110的视野局部重叠。因此,第二实施例所提供的识别标签读取系统100可以在更大的高度范围内读取外箱识别标签210,以适应外箱识别标签210的高度变化。控制模块170以多个侧向标签读取装置110执行侧向标签读取作业。
131.请参阅图20所示,为本发明第三实施例所提供的一种识别标签读取系统100。第三实施例的识别标签读取系统100更包含一辅助升降平台190,设置于支撑架112,且侧向标签读取装置110设置于辅助升降平台190,而间接地设置于支撑架112上。辅助升降平台190用以于高度方向z向上或向下移动侧向标签读取装置110,改变侧向标签读取装置110的高度,配合具有不同高度的外箱识别标签210。
132.于本发明实施例中,识别标签读取系统100可以通过测距装置160的检测,升降顶部标签读取装置120,以确保顶部标签读取装置120可以清楚获取内盒识别标签320。同时,通过检测距离值zd的变化,本发明识别标签读取系统100可以排除折叠上盖214对升降高度的干扰,而确实地以内盒300的顶面310高度为依据控制升降平台150,使得顶部标签读取装置120可以被升降到正确高度。因此,应用本发明的识别标签读取系统100,可以适应即时的外箱200及内盒300尺寸变化。
133.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟
悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。