1.本发明涉及飞行器及导向装置领域,特别是涉及一种用于导弹的摆翼结构。
背景技术:
2.飞行器在飞行过程中需要通过摆翼控制飞行方向,对于导弹等飞行器,其摆翼通常设置在导弹中部或者尾部,摆翼结构中除了有控制翼片运动的机构,还有实时检测翼片摆动角度的机构,现有的摆翼控制装置复杂,零件较多,导致整体设备体积较大,不太适合小型飞行器使用,且由于结构复杂导致其故障率高,使用稳定性不好。
技术实现要素:
3.为了解决以上问题,本发明提供一种用于导弹的摆翼结构,结构简单,整体体积较小,稳定性好。
4.为达此目的,本发明提供一种用于导弹的摆翼结构,包括底座、固定设置在底座上的上箱体和与上箱体配合的下箱体,所述底座为圆盘状结构,所述上箱体和下箱体共同拼接组成动力箱,所述动力箱为端部开口的立方体箱状结构,其开口端位于下箱体上,下箱体开口端设置固定连接有固定板,所述动力箱内还设置有圆轴轴舵和方轴轴舵,所述圆轴轴舵和方轴轴舵相互垂直设置,所述方轴轴舵为中部设置有环状结构的轴状结构,圆轴轴舵为轴状结构且穿过方轴轴舵中部的环状结构,所述方轴轴舵和圆轴轴舵均与动力箱侧壁活动连接且方轴轴舵和圆轴轴舵两端均穿过动力箱侧壁至动力箱外,方轴轴舵和圆周轴舵两端均设置有安装槽用于安装翼片;所述底座上设置有两个电机,所述电机输出端连接有蜗杆,蜗杆穿过底座延伸至动力箱内,所述方轴轴舵和所述圆轴轴舵上均设置有蜗轮与两个电机上的蜗杆配合,方轴轴舵和圆轴轴舵可在电机带动下分别转动;所述底座上还设置有安装孔用于连接导弹本体。
5.本发明的进一步改进,所述动力箱内还设置有两个角度测量仪,所述角度测量仪测量轴连接测量从动齿轮,所述方轴轴舵和圆轴轴舵上分别设置有测量主动齿轮与测量从动齿轮啮合;所述角度测量仪通过固定架固定于固定板上,所述角度测量仪上设置有数据接口用于连接数据线并传递测量数据。
6.本发明的进一步改进,所述方轴轴舵和所述圆周轴舵转动角度在
±
15
°
。
7.本发明的进一步改进,所述电机输出端和蜗杆之间设置有减速箱。
8.本申请一种用于导弹的摆翼结构,其实现的技术效果如下:1)结构简单,整体结构小,通过两个电机控制两组、四个翼片摆动,可以用于小型导弹或飞行器的导向且导向准确。
9.2)具备翼片摆动角度检测装置,通过角度测量仪可以完成翼片摆动角度的准确检测,并反馈测量数据。
附图说明
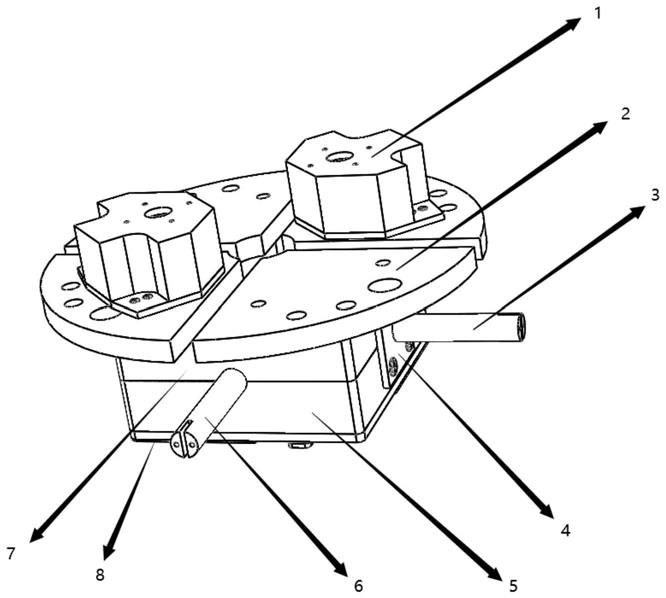
10.图1为本发明结构示意图一;图2为本发明结构示意图二;图3为本发明结构示意图三;图4为方轴轴舵结构示意图;附图说明:1、减速箱;2、底座;3、圆轴轴舵;4、固定垫片;5、下箱体;6、方轴轴舵;7、上箱体;8、固定板;9、蜗杆固定盖;10、固定架;11、角度测量仪;12、测量从动齿轮;13、测量主动齿轮;14、蜗杆;15、蜗轮。
具体实施方式
11.下面结合附图与具体实施方式对本发明作进一步详细描述:如图1和2所示的一种用于导弹的摆翼结构,包括底座2、固定设置在底座2上的上箱体7和与上箱体7配合的下箱体5,所述底座2为圆盘状结构,所述上箱体7和下箱体5共同拼接组成动力箱,所述动力箱为端部开口的立方体箱状结构,其开口端位于下箱体5上,下箱体5开口端设置固定连接有固定板8。所述底座2上设置有两个减速箱1,减速箱1输入端通过电机驱动,为简化附图,附图中没有画出电机,减速箱1输出端连接有蜗杆14,蜗杆14穿过底座2延伸至动力箱内。所述底座2上还设置有安装孔用于连接导弹本体。
12.如图3所示,动力箱内还设置有圆轴轴舵3和方轴轴舵6,所述圆轴轴舵3和方轴轴舵6相互垂直设置。如图4所示,所述方轴轴舵6为中部设置有环状结构的轴状结构,圆轴轴舵3为轴状结构且穿过方轴轴舵6中部的环状结构,所述方轴轴舵6和圆轴轴舵3均与动力箱侧壁活动连接且方轴轴舵6和圆轴轴舵3两端均穿过动力箱侧壁至动力箱外,方轴轴舵6和圆周轴舵两端均设置有安装槽用于安装翼片;所述方轴轴舵6和所述圆轴轴舵3上均设置有蜗轮15与两个电机上的蜗杆14配合,方轴轴舵6和圆轴轴舵3可在电机带动下分别转动;方轴轴舵6和所述圆周轴舵转动角度在
±
15
°
。
13.上箱体7和下箱体5通过设置在箱体侧部的固定垫片4连接,固定垫片4上设置有螺栓分别与上箱体7和下箱体5侧壁连接,上箱体7和下箱体5分体设置也方便与圆轴轴舵3和方轴轴舵6安装。
14.本发明的进一步改进,所述动力箱内还设置有两个角度测量仪11,所述角度测量仪11测量轴连接测量从动齿轮12,所述方轴轴舵6和圆轴轴舵3上分别设置有测量主动齿轮13与测量从动齿轮12啮合;所述角度测量仪11通过固定架10固定于固定板8上,所述角度测量仪11上设置有数据接口用于连接数据线并传递测量数据。
15.上述摆翼结构整体结构简单,体积小,通过两个电机控制两组、四个翼片摆动,可以用于小型导弹或飞行器的导向且导向准确。所述摆翼结构具备翼片摆动角度检测装置,通过角度测量仪11可以完成翼片摆动角度的准确检测,并反馈测量数据。
16.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
技术特征:
1.一种用于导弹的摆翼结构,其特征在于,包括底座、固定设置在底座上的上箱体和与上箱体配合的下箱体,所述底座为圆盘状结构,所述上箱体和下箱体共同拼接组成动力箱,所述动力箱为端部开口的立方体箱状结构,其开口端位于下箱体上,下箱体开口端设置固定连接有固定板,所述动力箱内还设置有圆轴轴舵和方轴轴舵,所述圆轴轴舵和方轴轴舵相互垂直设置,所述方轴轴舵为中部设置有环状结构的轴状结构,圆轴轴舵为轴状结构且穿过方轴轴舵中部的环状结构,所述方轴轴舵和圆轴轴舵均与动力箱侧壁活动连接且方轴轴舵和圆轴轴舵两端均穿过动力箱侧壁至动力箱外,方轴轴舵和圆周轴舵两端均设置有安装槽用于安装翼片;所述底座上设置有两个电机,所述电机输出端连接有蜗杆,蜗杆穿过底座延伸至动力箱内,所述方轴轴舵和所述圆轴轴舵上均设置有蜗轮与两个电机上的蜗杆配合,方轴轴舵和圆轴轴舵可在电机带动下分别转动;所述底座上还设置有安装孔用于连接导弹本体。2.根据权利要求1所述的一种用于导弹的摆翼结构 ,其特征在于:所述动力箱内还设置有两个角度测量仪,所述角度测量仪测量轴连接测量从动齿轮,所述方轴轴舵和圆轴轴舵上分别设置有测量主动齿轮与测量从动齿轮啮合;所述角度测量仪通过固定架固定于固定板上,所述角度测量仪上设置有数据接口用于连接数据线并传递测量数据。3.根据权利要求1或2所述的一种用于导弹的摆翼结构 ,其特征在于:所述方轴轴舵和所述圆周轴舵转动角度在
±
15
°
。4.根据权利要求3所述的一种用于导弹的摆翼结构 ,其特征在于:所述电机输出端和蜗杆之间设置有减速箱。
技术总结
本发明公开一种用于导弹的摆翼结构,包括底座、固定设置在底座上的上箱体和与上箱体配合的下箱体,所述上箱体和下箱体共同拼接组成动力箱,所述动力箱内还设置有圆轴轴舵和方轴轴舵,所述圆轴轴舵和方轴轴舵相互垂直设置,所述方轴轴舵和圆轴轴舵均与动力箱侧壁活动连接且方轴轴舵和圆轴轴舵两端均穿过动力箱侧壁至动力箱外,方轴轴舵和圆周轴舵两端均设置有安装槽用于安装翼片;方轴轴舵和圆轴轴舵可在电机带动下分别转动。所述的用于导弹的摆翼结构,结构简单,整体体积较小,稳定性好。稳定性好。
技术研发人员:刘忠福
受保护的技术使用者:镇江康驰机电设备有限公司
技术研发日:2020.05.21
技术公布日:2021/11/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。