1.本发明属于海上小型目标状态测量技术领域,具体涉及一种利用sins/gnss组合运算且兼顾gnss信号缺失的情况下,海面小型目标升沉运动测量方法。
背景技术:
2.随着土地资源的逐渐枯竭,人类对海洋的开发步伐也在加快,越来越多的探测设备被投入海洋。作为探索海洋任务的最后也是最重要的一部分,设备的回收利用可能决定整个项目的成败。海洋勘探设备浮出水面后的回收工作,受海洋状态的影响很大。从工程实践的经验来看,由于船舶在恶劣海况下的晃动会严重威胁起重机的运行安全,所以对设备的回收工作经常是在良好的海况下进行。错过了最好的回收时间可能会导致设备因耗尽电能而失去联系,消失在茫茫的海洋中。波浪大小是影响回收工作的重要因素,从目标的升沉运动中提取的波高数据,可以用于估计其所处环境的海况信息,为回收工作的合理安排提供重要参考。
3.作为经典的组合的方式,sins/gnss组合导航技术不仅能够提供很高的定位精度,sins的高频采样还可以保证非常高的实时性,gnss在限制sins发散方面效果显著。在工程实践中,一些小型设备在浮出水面后,因舱体内的gnss天线距离水平面较近,卫星信号容易受到波浪的影响,在海况稍微差的中浪级情况下,偶有gnss信号中断数分钟的情况发生。恶劣海况下gnss信号的频繁缺失,将导致sins/gnss组合的测量结果不再可靠。在天向运动轨迹解算方面,模拟波面历程有助于解决天向发散问题。波浪是一种具有平稳性和各态历经性的随机现象,能够利用少数几个测点的波浪记录表征海浪的总体特征。在工程实践中,一般先要获得波浪的有效波高、周期等参数后,通过模拟靶谱法来获得一列不规则波面的时间历程。可用于靶谱模拟的波浪频谱有neumann谱、bretschneider谱、mitsuyasu谱、issc谱、p
‑
m谱、jonswap谱和文氏谱等。其中单参数谱p
‑
m谱,只有一个输入参数,即有效波高,十分适合应用于与sins的组合运算。模拟波面时间历程用于填补gnss缺失后的组合运算,于天向升沉运动测量方面具有重要研究意义。
技术实现要素:
4.为解决上述问题,本发明公开了一种海面小型目标升沉运动测量方法,适用于对远处的海面目标回收前,通过测量目标的升沉运动轨迹,判断其所处环境的海况信息,为工作人员回收工作的合理安排提供参考。
5.为达到上述目的,本发明的技术方案如下:
6.一种海面小型目标升沉运动测量方法,包括以下步骤:
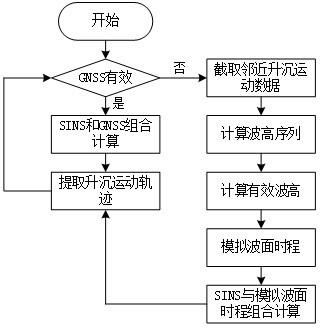
7.步骤1:判断gnss是否有效,若有效则跳转至步骤2,否则跳转至步骤4;
8.步骤2:获取sins和gnss参量,并进行组合运算,计算出在东北天坐标系下的天向运动轨迹;
9.步骤3:根据步骤2计算出的天向运动轨迹,计算海面目标的升沉运动轨迹,跳转至
步骤1;
10.步骤4:截取临近时间段内的升沉运动轨迹,计算波高序列,计算有效波高;
11.步骤5:根据有效波高和波浪频谱,模拟出下一个时间段内的波面时间历程;
12.步骤6:将sins的参量和模拟的波面时程组合运算,计算出在东北天坐标系下的天向运动轨迹;
13.步骤7:根据步骤6计算出的天向运动轨迹,计算海面目标的升沉运动轨迹,跳转至步骤1。
14.进一步的,所述步骤3具体为:
15.从sins/gnss的组合结果中,选取天向运动轨迹数据,记为h
i
(t),i=1,2,3,...,n。将该数据等分成若干个数据片段,取其中一个数据片段记为h
i
(t),i=1,2,3,...,n,n<n。以位移h为纵轴,时间t为横轴,建立直角坐标系,利用最小二乘法对该坐标系中数据片段的离散点进行拟合,得直线h=at b,该直线可视为本数据片段的虚拟水平线,计算所有离散点到该直线的距离,记为d
i
(t),i=1,2,3,...,n,其中,若离散点位于直线上方,取距离为正值,视为高于水平线的波程;若离散点位于直线下方,取距离为负值,视为低于水平线的波程。对d
i
(t)求平均值,记为d
a
。在理想条件下,波面历程可视为无限多个正弦波组成的合成波的运动轨迹,其均值d
a
应为零,但是在工程实践中,因误差的存在,d
a
的值并不为零,为了消除该均值误差,令d
i
(t)=d
i
(t)
‑
d
a
,于是从该数据片段中得到了海面目标的以水平面为参考的升沉运动轨迹,即d
i
(t)。其它数据片段的处理方法以此类推。所有数据片段的升沉运动轨迹组成了海面目标的天向运动历程。
16.进一步的,所述步骤4具体为:
17.选取gnss失效前的一段时间内的升沉运动数据,该段数据包含若干波程信息(d1、d2、d3...),且持续时间较短(分钟量级),记为
18.d(t)={d
1 d
2 d
3 ... d
m
}
19.令
20.d
i
(t)={u1(t) u2(t) ... u
n
(t)}
21.其中,n<m,且有
22.u1(t)={d
1 d
2 ... d
j
},
23.u2(t)={d
j 1 d
j 2 ..., d
j k
},
24....
25.u
n
(t)={d
l d
l 1 ... d
m
}
26.其中,每个u(t)中的元素都同号,相邻两个u(t)中的元素异号。如果u1(t)中的元素是负号,在舍弃该组元素后,根据上跨零点法,各区间的波高可表示为
27.w
i
=max(u
2i
(t))
‑
min(u
2i 1
(t)),i=1,2,3,...,q,且q<n/2
28.如果u1(t)中的元素是正号,在舍弃该组元素后,根据下跨零点法,波高可表示为
29.w
i
=max(u
2i 1
(t))
‑
min(u
2i
(t)),i=1,2,3,...,q,且q<n/2
30.将波高数组中的所有元素按照数值大小降序排列,取前面三分之一大波的平均波高作为有效波高。
31.进一步的,所述步骤5具体为:
32.以有效波高值代入p
‑
m频谱中得到的波浪谱为靶谱,模拟不规则波面的时间历程,
其中,p
‑
m谱为
[0033][0034]
其中ω为圆频率,h
s
为有效波高,把频率分成m份,则波面时程可表示为
[0035][0036]
其中,m0是频谱的零阶矩,是随机初相位,另有
[0037][0038]
其中,ω
i
是边界频率。至此可以根据需求模拟任意时长和采样频率的波面时程,记为
[0039]
η(t)={η
1 η
2 η
3 ... η
n
}
[0040]
即可用于和sins的天向位置组合计算。
[0041]
本发明的有益效果是:
[0042]
本发明所述的海面小型目标升沉运动测量方法,采用p
‑
m波浪频谱模拟波面历程,可以应对gnss缺失导致的天向发散问题,保证系统在恶劣海况导致的gnss断断续续的情况下,能够持续稳定地输出升沉运动轨迹以用于估计海况信息。相比常规的使用快速傅里叶变换的频域分析方法,具有更高的实时性,无需在固定时间间隔截取数据用于计算,也避免了频域分析导致的失真问题。
附图说明
[0043]
图1为本发明的计算原理图;
[0044]
图2为从组合结果中提取波面历程示意图;
[0045]
图3为上跨零点法计算波高示意图;
[0046]
图4采用模拟波面组合和不采用其参与组合的结果对比图;
[0047]
图5为该方法的计算结果的波高统计图。
具体实施方式
[0048]
下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
[0049]
海洋探测设备浮出水面后,其升沉运动可以在一定程度上反应其所在环境的海况信息。如图1所示,本发明所述的一种海面小型目标升沉运动测量方法,实现方法具体步骤如下:
[0050]
1)建立组合导航系统模型
[0051]
以gnss信号有效情况为例,建立基于卡尔曼滤波的组合导航系统模型为:
[0052][0053]
其中,
[0054]
[0055]
其中,φ
z
、φ
y
、φ
z
为惯导失准角,为速度误差,δλ、δl、δh为位置误差,ε
x
、ε
y
、ε
z
为陀螺随机常值漂移,为加速度计随机常值偏值。
[0056]
测量向量z为sins和gnss在天向的量测值之差,即
[0057]
z=[h
sins
‑
h
gnss
]
[0058]
矩阵w是陀螺仪和加速度计的测量噪声,矩阵v是gnss在天向高度的测量噪声。
[0059]
2)从sins/gnss组合中提取数据
[0060]
在gnss信号有效的情况下,则采用sins和gnss组合的结果作为升沉运动轨迹的数据来源。记所选天向运动轨迹数据为h
i
(t),i=1,2,3,...,n。将该数据等分成若干个数据片段,取其中一个数据片段记为h
i
(t),i=1,2,3,...,n,n<n。以位移h为纵轴,时间t为横轴,建立直角坐标系,如图2所示。图中t1和t2是目标的天向运动轨迹中对应的时刻,vt1和vt2是其相对于虚拟水平线的时刻。利用最小二乘法对该坐标系中数据片段的离散点进行拟合,即求解下面目标函数的最优值:
[0061]
j(θ)=(b
‑
tθ)
t
(b
‑
tθ)
[0062]
其中,
[0063]
b=[h
1 h
2 ... h
n
]
t
[0064][0065][0066]
n是数据片段中测量值的个数。
[0067]
所得直线h=at b,即为虚拟水平线。计算所有离散点到该直线的距离,记为di(t),i=1,2,3,...,n,其中,若离散点位于直线上方,其距离为正值,若离散点位于直线下方,其距离为负值。对di(t)求平均值,记为da,令di(t)=di(t)
‑
da,于是从该数据片段中得到了海面目标的以水平面为参考的升沉运动轨迹,即di(t)。其它数据片段的处理方法以此类推。所有数据片段的升沉运动轨迹组成了海面目标的天向运动历程。
[0068]
3)从sins和模拟波面历程的组合中提取数据
[0069]
当gnss失效时,需要对波面时间历程模拟,以供sins在天向位移组合之用。分为以下几个步骤:
[0070]
步骤1:计算有效波高
[0071]
选取gnss失效前的一段时间内的升沉运动数据,该段数据包含足够多的波高信息,且持续时间较短(分钟量级)。记为
[0072]
d(t)={d
1 d
2 d
3 ... d
m
}
[0073]
令
[0074]
d(t)={u1(t) u2(t) ... u
n
(t)}
[0075]
其中,n<m,且有
[0076]
u1(t)={d
1 d
2 ... d
j
},
[0077]
u2(t)={d
j 1 d
j 2 ..., d
j k
},
[0078]
...
[0079]
u
n
(t)={d
l d
l 1 ... d
m
}
[0080]
其中,每个u(t)中的元素都同号,相邻两个u(t)中的元素异号。如果u1(t)中的元素是负号,在舍弃该组元素后,根据图3所示上跨零点法,各区间的波高可表示为
[0081]
w
i
=max(u
2i
(t))
‑
min(u
2i 1
(t)),i=1,2,3,...,q,且q<n/2
[0082]
如果u1(t)中的元素是正号,在舍弃该组元素后,根据下跨零点法,波高可表示为
[0083]
w
i
=max(u
2i 1
(t))
‑
min(u
2i
(t)),i=1,2,3,...,q,且q<n/2
[0084]
将波高数组中的所有元素按照数值大小降序排列,取前面三分之一大波的平均波高作为有效波高。
[0085]
步骤2:模拟波面历程
[0086]
以有效波高值代入p
‑
m频谱中得到的波浪谱为靶谱,模拟不规则波面的时间历程,其中,p
‑
m谱为
[0087][0088]
其中ω为圆频率,h
s
为有效波高,把频率分成m份,则波面时程可表示为
[0089][0090]
其中,m0是频谱的零阶矩,是随机初相位,另有
[0091][0092]
其中,ω
i
是边界频率。至此可以根据需求模拟任意时长和采样频率的波面时程,记为
[0093]
η(t)={η
1 η
2 η
3 ... η
n
}
[0094]
即可用于和sins的天向位置组合计算。
[0095]
步骤3:sins和模拟值组合运算
[0096]
使用模拟的波面历程数据和sins的组合模型中,量测方程为
[0097]
z
s
=hx v
s
[0098]
其中,v
s
表示模拟波面历程数据的误差,量测向量为
[0099]
z
s
=[h
sins
‑
η(t)]
[0100]
采用模拟波高程与sins组合的方式,填补了恶劣海况下gnss中断时的不足。而且可提供高动态性的实时输出。
[0101]
步骤4:提取升沉运动信息
[0102]
对组合结果的升沉运动信息提取方法与图2所示方法相同。
[0103]
在gnss有效的时候使用gnss和sins组合,在其组合结果的天向位移中提取目标的升沉轨迹。在gnss无效的时候,使用模拟的波面历程和sins组合,在其组合结果中提取目标的升沉轨迹。如此往复,可以持续输出目标在所处环境中的升沉信息,为回收设备的工作人员提供实时海况信息参考。
[0104]
实施例1
[0105]
本实施例设置gnss中断时间为小于30分钟的随机值,连通时间为小于5秒的随机值,断断续续持续10小时,采用上述方法对目标的升沉轨迹进行计算。截取某一gnss中断时
间的组合片段,结果如图4所示。每五分钟计算一次该时间段的平均波高和有效波高,如图5所示,仿真结果验证了该发明的有效性。
[0106]
本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。