1.本发明涉及石油修井作业技术领域,特别涉及一种电动修井系统及方法。
背景技术:
2.随着油田开发进入中后期,井下修井作业中面临的困难和作业环境变得日益复杂,随着近年来深井、超深井以及水平井修井数量的增多,传统的人工修井方法存在许多问题,包括:
3.1)人工修井在对深井、超深井、水平井等复杂井检修时只能停工检修,检修周期长,无法及时检修;
4.2)人工修井的失误率较高,例如,在套损修复过程容易造成意外开窗侧钻,尤其是严重套管变形井和错段井,修复过程中极易丢失原井眼,造成油水井报废;
5.3)人工修井的成功率较低,例如,大斜度井、水平井受井身结构的影响,人工修井过程中扭矩损失大,钻压施加困难,修复成功率极低;
6.4)人工修井在进行卡阻管柱快速打捞、套管错断、套变严重井等修井作业时,效率低、成本高;
7.5)人工修井存在较大的安全隐患。
8.综上所述,传统的人工修井方法存在施工工序繁琐、施工周期长、人员劳动强度大、施工效率低、成本高、安全隐患高等问题,难以满足现有的大量的复杂井对修井作业的需求。
9.针对上述问题,目前尚未提出有效的解决方案。
技术实现要素:
10.本发明实施例提供一种电动修井系统,用于提高修井作业的效率,该系统包括:电缆、修井仪、测量设备、井下控制设备和地面控制设备;
11.其中,电缆用于带动修井仪下井;
12.测量设备用于测量电缆的张力参数和修井仪的位置参数;
13.井下控制设备用于:将电缆的张力参数和修井仪的位置参数发送至地面控制设备;接收地面控制设备发送的控制指令;根据控制指令,控制电缆移动和修井仪修井;
14.地面控制设备用于:根据电缆的张力参数和修井仪的位置参数,确定电缆和修井仪状态信息,生成控制指令;将控制指令发送至井下控制设备。
15.本发明实施例提供一种电动修井方法,用于提高修井作业的效率,该方法包括:
16.电缆带动修井仪下井;
17.测量设备测量电缆的张力参数和修井仪的位置参数;
18.井下控制设备将电缆的张力参数和修井仪的位置参数发送至地面控制设备;
19.地面控制设备根据电缆的张力参数和修井仪的位置参数,确定电缆和修井仪状态信息,生成控制指令;将控制指令发送至井下控制设备;
20.井下控制设备接收地面控制设备发送的控制指令;根据控制指令,控制电缆移动和修井仪修井。
21.本发明实施例提供又一种电动修井方法,用于提高修井作业的效率,该方法包括:
22.在电缆带动修井仪下井之后,获得电缆的张力参数和修井仪的位置参数;
23.根据电缆的张力参数和修井仪的位置参数,确定电缆和修井仪状态信息,生成控制指令;
24.根据控制指令,控制电缆移动和修井仪修井。
25.本发明实施例还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述电动修井方法。
26.本发明实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有执行上述电动修井方法的计算机程序。
27.本发明实施例通过:电缆带动修井仪下井,无需人工下井;测量设备测量电缆的张力参数和修井仪的位置参数,实现了井下数据采集;井下控制设备将电缆的张力参数和修井仪的位置参数发送至地面控制设备,实现了井下数据传输;地面控制设备根据电缆的张力参数和修井仪的位置参数,确定电缆和修井仪状态信息,生成控制指令;将控制指令发送至井下控制设备,实现了对井下数据进行综合分析,提高了修井的成功率;井下控制设备接收地面控制设备发送的控制指令;根据控制指令,控制电缆移动和修井仪修井,本发明通过电缆带动实现修井仪下井,可以减少人工劳动,降低修井成本,规避安全隐患,通过测量设备、井下控制设备和地面控制设备实现井下数据的采集、分析、传输,以及控制指令下达,可以减少施工工序,缩短施工周期长,提高修井的成功率,从提高了修井作业的整体效率。
附图说明
28.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
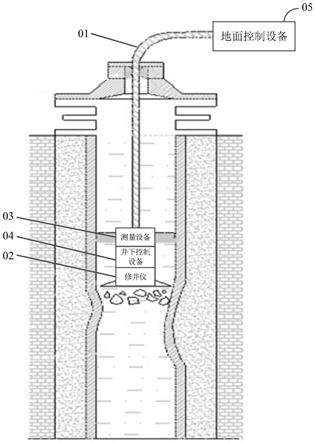
29.图1为本发明实施例电动修井系统结构的示意图;
30.图2为本发明实施例电动修井系统具体结构的示意图;
31.图3为本发明实施例中电动修井方法流程的示意图;
32.图4为本发明实施例中又一种电动修井方法流程的示意图;
33.图5为本发明实施例中计算机设备结构的示意图。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。以下所使用的,术语“单元”或者“模块”可以实现预定功能的软件和/或硬件的组合。
35.为了解决现有的人工修井方法施工工序繁琐、效率低的技术问题,本发明实施例
提供一种电动修井系统,用于提高修井作业的效率,图1为本发明实施例电动修井系统结构的示意图,如图1所示,该系统包括:电缆01、修井仪02、测量设备03、井下控制设备04和地面控制设备05;
36.其中,电缆01用于带动修井仪02下井;
37.测量设备03用于测量电缆01的张力参数和修井仪02的位置参数;
38.井下控制设备04用于:将电缆01的张力参数和修井仪02的位置参数发送至地面控制设备05;接收地面控制设备05发送的控制指令;根据控制指令,控制电缆01移动和修井仪02修井;
39.地面控制设备05用于:根据电缆01的张力参数和修井仪02的位置参数,确定电缆01和修井仪02状态信息,生成控制指令;将控制指令发送至井下控制设备04。
40.如图1所示,本发明实施例通过:电缆带动修井仪下井,无需人工下井;测量设备测量电缆的张力参数和修井仪的位置参数,实现了井下数据采集;井下控制设备将电缆的张力参数和修井仪的位置参数发送至地面控制设备,实现了井下数据传输;地面控制设备根据电缆的张力参数和修井仪的位置参数,确定电缆和修井仪状态信息,生成控制指令;将控制指令发送至井下控制设备,实现了对井下数据进行综合分析,提高了修井的成功率;井下控制设备接收地面控制设备发送的控制指令;根据控制指令,控制电缆移动和修井仪修井,本发明通过电缆带动实现修井仪下井,可以减少人工劳动,降低修井成本,规避安全隐患,通过测量设备、井下控制设备和地面控制设备实现井下数据的采集、分析、传输,以及控制指令下达,可以减少施工工序,缩短施工周期长,提高修井的成功率,从提高了修井作业的整体效率。
41.在一个实施例中,修井仪02可以包括:磨铣仪、切割仪或钻孔仪。
42.具体实施时,在井发生故障时,可以根据故障原因确定修井作业类型,进而确定修井仪02的类型,包括:磨铣仪、切割仪或钻孔仪,修井仪02还可以是其他工具,本发明不以此为限定,修井仪02有锚定、伸缩、旋转等功能,可以在地面控制设备05的控制指令下完成磨铣、切割或钻孔等修井作业。电缆01可以是钢丝电缆,电缆01可以与修井仪02连接,在操作人员的控制下,带动修井仪02下井。
43.图2为本发明实施例电动修井系统具体结构的示意图,如图2所示,在一个实施例中,测量设备03可以包括:张力测量短节031和接箍测量短节032;
44.其中,张力测量短031节用于测量电缆01的张力参数;接箍测量短节032用于测量修井仪02的位置参数。
45.具体实施时,张力测量短节031和接箍测量短节032可以连接在电缆01上,并且接箍测量短节032可以位于张力测量短节031之下,张力测量短节031可以测量电缆01的张力参数,接箍测量短节032可以测量修井仪02的位置参数。测井仪02在上提与下放的过程中,张力测量短节031和接箍测量短节032可以通过井下控制设备04将上述测量到的参数传输至地面控制设备05,可以得到加在电缆01头上力的大小以及测井仪02准确位置,这样可以使操作人员在地面有效地监控井下仪器的工作状态,从而达到有效保护仪器的目的。
46.井下控制设备04可以连接在电缆01上,并且位于接箍测量短节032之下,井下控制设备04可以是一个电子节,包括遥测电路,用于数据传输,将上述测量到的参数传输至地面控制设备05。
47.在一个实施例中,地面控制设备05还用于:为电缆01、修井仪02、测量设备03和井下控制设备04提供电力。
48.具体实施时,地面控制设备05可以设置于地面,实现与井下控制设备04的通信,可以根据上述测量到的参数,实时监视井下电缆01的电缆头电压、电流、张力,以及修井仪02的工作状态,实现测量监视及校深曲线,地面控制设备05可以包括计算机,可以将上述测量到的参数解码送入计算机,通过计算机和操作人员分析计算后,生成控制电缆01和修井仪02的控制指令,并将上述控制指令发送至井下控制设备04。地面控制设备05还可以为电缆01、修井仪02、测量设备03和井下控制设备04提供0-1000v,2a的电力。
49.电缆01和修井仪02的控制指令可以被井下控制设备04接收,井下控制设备04还可以包括单片机,通过单片机可以根据上述控制指令控制电缆01移动和修井仪02修井。可以采用仿真技术实现井下控制设备04的信号采集和控制逻辑的软件开发调试。
50.如图2所示,在一个实施例中,该系统还可以包括:防喷设备06,防喷设备06可以设置于井口,用于防止井口井喷。
51.具体实施时,防喷设备06可以是钢丝电缆专用的防喷装置,具有密封和剪切功能,可以设置于井口,在修井作业过程中防止井口井喷。
52.如图2所示,在一个实施例中,该系统还可以包括:旋转短节07,用于调整修井仪02的角度,防止修井仪02随电缆旋转;
53.井下控制设备04还用于:根据控制指令,控制旋转短节07调整修井仪02的角度。
54.具体实施时,旋转短节07可以连接在电缆01上,并且位于张力测量短节031之上,在电缆01输送测井仪02时,仅旋转短节07的上端随电缆02的旋转而转动,而旋转短节07下端及下部的测井仪02以及其他设备在井内的姿态保持不变,可以避免测井仪02以及其他设备在上提或下放时产生旋转运动,造成电缆打扭。地面控制设备05还可以根据电缆01的张力参数和测量修井仪02的位置参数,生成控制旋转短节07的控制指令,该控制指令可以被井下控制设备04接收,井下控制设备04还可以根据该控制指令,控制旋转短节07调整修井仪02的角度。
55.如图2所示,在一个实施例中,该系统还可以包括:扶正器08,用于调整修井仪02在井中的位置,防止修井仪02与井壁接触;
56.井下控制设备04还用于:根据控制指令,控制扶正器08调整修井仪02在井中的位置。
57.具体实施时,扶正器08可以连接在电缆01上,并且位于井下控制设备04之上,可以提供足够的弹性力,保证井下修井仪02以及其他设备处于居中位置,居中放置的仪器与井壁的接触面积最小,在运移的过程中受到的阻力也最小,能够使修井仪02快速到达目的层位。地面控制设备05还可以根据电缆01的张力参数和测量修井仪02的位置参数,生成控制扶正器08的控制指令,该控制指令可以被井下控制设备04接收,井下控制设备04还可以根据该控制指令,控制扶正器08调整修井仪02在井中的位置。
58.如图2所示,在一个实施例中,该系统还可以包括:平衡短节09,用于平衡修井仪02内部与井液的之间的压力;
59.井下控制设备04还用于:根据控制指令,控制平衡短节09平衡修井仪02内部与井液的之间的压力。
60.具体实施时,平衡短节09可以连接在电缆01上,并且位于井下控制设备04之下,用于平衡修井仪02内部与井液的之间的压力,地面控制设备05还可以根据电缆01的张力参数和测量修井仪02的位置参数,生成控制平衡短节09的控制指令,该控制指令可以被井下控制设备04接收,井下控制设备04还可以根据该控制指令,控制平衡短节09平衡修井仪02内部与井液的之间的压力。
61.基于同一发明构思,本发明实施例中还提供了一种电动修井方法,该方法应用于上述的电动修井系统,如下面的实施例。由于电动修井方法解决问题的原理与电动修井系统相似,因此方法的实施可以参见系统的实施,重复之处不再赘述。
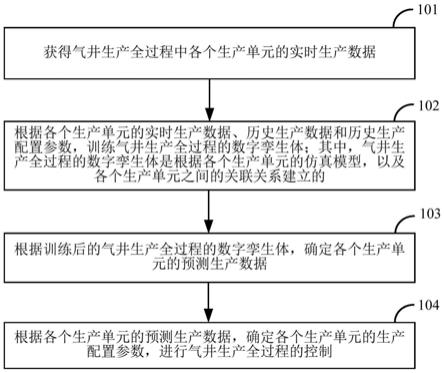
62.图3为本发明实施例中电动修井方法流程的示意图,如图3所示,该方法包括:
63.步骤301:电缆带动修井仪下井;
64.步骤302:测量设备测量电缆的张力参数和修井仪的位置参数;
65.步骤303:井下控制设备将电缆的张力参数和修井仪的位置参数发送至地面控制设备;
66.步骤304:地面控制设备根据电缆的张力参数和修井仪的位置参数,确定电缆和修井仪状态信息,生成控制指令;将控制指令发送至井下控制设备;
67.步骤305:井下控制设备接收地面控制设备发送的控制指令;根据控制指令,控制电缆移动和修井仪修井。
68.在一个实施例中,该方法还包括:
69.井下控制设备根据控制指令,控制旋转短节调整修井仪的角度。
70.在一个实施例中,该方法还包括:
71.井下控制设备根据控制指令,控制扶正器调整修井仪在井中的位置。
72.在一个实施例中,该方法还包括:
73.井下控制设备根据控制指令,控制平衡短节平衡修井仪内部与井液的之间的压力。
74.下面举一个具体的例子,以便于理解本发明如何实施。
75.在井发生故障时,根据故障原因确定作业类型,进而确定修井仪的类型,按照图2将电动修井系统中的各个设备连接,在井口设置防喷设备,通过地面控制设备为系统中的其他设备提供电力,然后进行以下步骤:
76.第一步:在操作人员的控制电缆带动修井仪下井;
77.第二步:测井仪在上提与下放的过程中,张力测量短节实时测量电缆的张力参数,接箍测量短节实时测量修井仪的位置参数;
78.第三步:张力测量短节和接箍测量短节通过井下控制设备将测量到的参数传输至地面控制设备;
79.第四步:地面控制设备根据上述测量到的参数,实时监视井下电缆的电缆头电压、电流、张力,以及修井仪的工作状态,实现测量监视及校深曲线,并将上述测量到的参数解码送入计算机,通过计算机和操作人员分析计算后,生成控制电缆、修井仪、旋转短节、扶正器和平衡短节的控制指令,并将上述控制指令发送至井下控制设备;
80.第五步:井下控制设备根据上述控制指令,控制电缆移动、修井仪修井、旋转短节调整修井仪的角度、扶正器调整修井仪在井中的位置和平衡短节平衡修井仪内部与井液的
之间的压力,完成修井作业。
81.基于同一发明构思,本发明实施例中还提供了又一种电动修井方法,如下面的实施例。由于电动修井方法解决问题的原理与电动修井系统相似,因此方法的实施可以参见系统的实施,重复之处不再赘述。
82.图4为本发明实施例中又一种电动修井方法流程的示意图,如图4所示,该方法包括:
83.步骤401:在电缆带动修井仪下井之后,获得电缆的张力参数和修井仪的位置参数;
84.步骤402:根据电缆的张力参数和修井仪的位置参数,确定电缆和修井仪状态信息,生成控制指令;
85.步骤403:根据控制指令,控制电缆移动和修井仪修井。
86.本发明实施例还提供了一种计算机设备,图5为本发明实施例中计算机设备结构的示意图,如图5所示,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述电动修井方法。
87.本发明实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有执行上述电动修井方法的计算机程序。
88.综上所述,本发明实施例提供的电动修井系统及方法具有以下优点:
89.(1)通过电缆带动实现修井仪下井,可以减少人工劳动,降低修井成本,规避安全隐患,通过测量设备、井下控制设备和地面控制设备实现井下数据的采集、分析、传输,以及控制指令下达,可以减少施工工序,缩短施工周期长,提高修井的成功率,从提高了修井作业的整体效率。
90.(2)仪器的摩擦阻力小、扭矩损失小,井下电动修井技术采用电缆传输,磨铣可通过井底电机实现近端输入,所需扭矩较小,可解决水平井、大斜度井磨阻大、扭矩损失大的问题。
91.(3)居中效果好,采用近井底扶正方式,磨铣时保证管柱居中,有效避免管柱开窗。
92.(4)安全环保,井口专用防喷工具具有密封和剪切功能,可确保作业过程井口安全,取消常规起下管柱作业,减少人为参与,在降低安全事故的同时减少现场油污落地。
93.本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
94.本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
95.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特
定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
96.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
97.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。