1.本实用新型涉及物流自动化分拣机械设备,具体地说是一种低成本的自动化分拣装置。
背景技术:
2.进入21世纪以来,随着我国经济的不断发展,特别是电商的蓬勃兴起,国内物流业总体规模快速增长,物流服务水平显著提高,物流占整个服务业的比重也不断增加。
3.但是,与国外发达国家相比,我国物流行业整体水平偏低,还存在效率偏低,采用人海战术,物流自动化水平低等突出问题。
4.物流业行业自身如何转变发展模式,向以信息技术和供应链管理为核心的现代物流业发展,通过提供低成本、高效率、多样化、自动化专业化的物流服务,成为行业研究的一个重要课题,虽然市场上有很多各式各样的分检系统,普片存在价格昂贵、结构复杂、维修不便等特点。
5.cn201821286632.9号中国专利公开了一种分拣装置,属于物流设备技术领域,包括扫描机构、传动机构、执行机构、分拣机构;扫描机构用于扫描快递的二维码;传动机构用于通过传送带传送分拣货物,并根据需要的传送速度,通过采用二级减速器对电机减速的方式,达到预期传送速度;执行机构用于采用曲柄滑块机构将在传送的货物推送到分拣口;分拣机构用于通过电机驱动与机械手连接的短螺纹杆进行机械手的开合以及驱动与机械手臂连接的长螺纹杆来进行机械手的移动最终实现对分拣口的货物的移动分拣。
技术实现要素:
6.本实用新型为解决现有的问题,旨在提供一种包裹自动化分拣装置,具有结构简单、价格低廉的特点,适合于中小企业普及使用。
7.为了达到上述目的,本实用新型采用的技术方案包括传输通道,包裹在所述传输通道上被运输至回收箱或收纳箱中,包括包裹地址二维码识别模块和若干包裹分拣及收纳箱模块;包裹地址二维码识别模块包括地址二维码识别系统;包裹分拣及收纳箱模块包括用于分拣包裹的机械手组件,所述机械手组件包括支杆和若干摆臂,所述若干摆臂依次通过转轴连接。
8.进一步地,机械手组件的支杆和若干摆臂分别由伺服电机驱动,并可做出阻止包裹前进、推动包裹进入回收箱或收纳箱中。机械手组件可将传输通道上的包裹推入目标包裹收纳箱模块,实现自动分拣。
9.进一步地,所述传输通道由平皮带输送机、传动链轮、传动链条组成,并由外部电机控制传动。
10.进一步地,所述包裹地址二维码识别模块采用cis,即由光电cis扫描管、图像处理系统等组成。
11.进一步地,所述传输通道的侧边设有包裹检测传感器,包裹进入包裹检测传感器
的检测区域时,包裹检测传感器发出信号,传输通道暂时停止传送。
12.进一步地,传输通道的末端通过倾斜的后通道进入回收箱。
13.进一步地,传输通道的侧边通过倾斜的侧通道进入包裹收纳箱。
14.进一步地,包裹二维码朝上放置于传输通道上,包裹经传输通道传输进入地址二维码识别系统对包裹目的地进行自动检测。
15.进一步地,在各个收纳箱模块安装有供包裹滑动的倾斜金属板和塑料包裹收纳箱。
16.进一步地,包裹分拣及包裹收纳箱模块可根据分拣目的地个数进行随意加减。和现有技术相比,本实用新型可自动识别包裹目的地,在传输系统中通过机械手将包裹送入目标包裹收纳箱,自动分拣失败的包裹进入回收箱由人工进行处理。
17.采用机器配合人工的半自动化方式,减少了人工分拣成本,同时与全自动化机器相比,具有构造简单,成本低,维护方便等优点。特别是目标包裹收纳箱实现模块化,根据包裹目的地的数量,可以自由拼装加减。使分拣系统的使用范围更加广泛。
附图说明
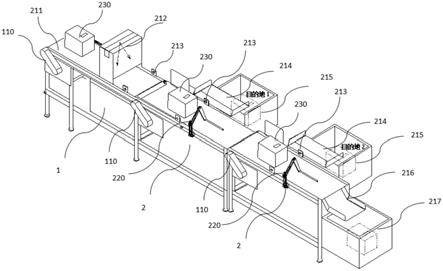
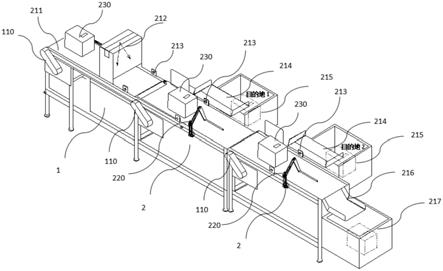
18.图1为本实用新型实施例的结构示意图;
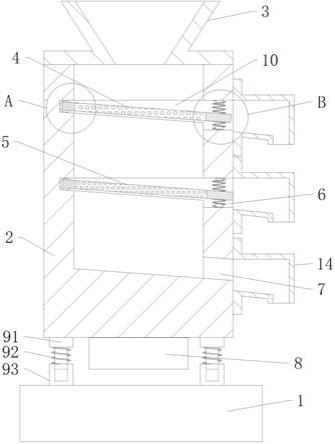
19.图2a为本实用新型的实施例的使用说明图;
20.图2b为本实用新型的实施例的使用说明图;
21.图2c为本实用新型的实施例的使用说明图。
具体实施方式
22.为使得本实用新型的发明目的、特征、优点能够更加的明显和易懂,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,下面所描述的实施例仅仅是本实用新型一部分实施例,而非全部的实施例。
23.参见图1,图1给出了本实用新型提供的一种低成本自动化分拣系统整体图,包裹类物流自动化分拣系统包括传输通道211、包裹地址二维码识别模块1、包裹分拣及包裹收纳箱模块2、回收箱217、外部电机及链条等动力装置110;包裹地址二维码识别模块1、包裹分拣及包裹收纳箱模块2分别带有独立的外部电机及链条等动力装置110,包裹分拣及包裹收纳箱模块2可以根据包裹目的地个数进行加减。
24.包裹地址二维码识别模块1由平皮带传输通道211、地址二维码识别系统212、包裹通过检测传感器213组成。在本实用新型例中,依靠人工将包裹二维码朝上放置于传输通道211上,包裹230经传输通道传输进入地址二维码识别系统212对包裹目的地进行自动检测,本实用新型地址二维码识别系统212识别采用cis(contact image sensor),当包裹230进入包裹检测传感器213时,传感器213发出信号,传输通道暂时停止传送,以保证前面已进入包裹分拣及包裹收纳箱模块2的包裹和后续包裹间的距离。
25.经地址二维码识别系统21识别的包裹230进入包裹分拣及包裹收纳箱模块2,系统根据识别结果自动对应包裹目的地1或目的地2等,当包裹230进入包裹检测传感器213时,包裹分拣机械手组件220开始运作,包裹分拣机械手组件220由内部伺服电机控制摆臂将包裹推离传输通道,包裹230经倾斜金属板进入塑料包裹收纳箱215。这些进入包裹收纳箱215
的所有包裹,均由快递员送往目的地。
26.在包裹分拣及包裹收纳箱模块2中由于包裹分拣机械手组件220及系统控制等失误造成包裹分拣失败的,该包裹将在传输通道上继续传输,最后经过倾斜的后通道216进入分拣系统末端的回收箱217内,进入回收箱217内包裹将由人工进行分拣处理。
27.图2a
‑
图2c展示了分拣机械手组件的具体工作过程,主要描述进入包裹分拣及包裹收纳箱模块2的包裹如何经分拣机械手组件220分拣进入包裹收纳箱215。分拣机械手组件220包括竖直的支杆,以及第一摆臂321、第二摆臂322以及第三摆臂323,并且依次通过由伺服电机驱动的转轴连接,可受控做出阻止包裹前进、推动包裹进入回收箱或收纳箱等动作。而上述操控可采用现有技术,并非本实用新型的改进之处。
28.图2a中,在包裹分拣及包裹收纳箱模块2的包裹230进入包裹通过检测传感器213时,系统自动判别包裹目的地。如包裹属于本目的地,分拣机械手组件220开始动作。
29.图2b中,分拣机械手组件220的第一摆臂321向下,进而通过横向的第三摆臂323阻止包裹230向前移动。
30.图2c中,分拣机械手组件220的第一摆臂321伸出,第二摆臂322与之一同推动包裹230经侧通道214(倾斜金属板)进入塑料包裹收纳箱215。进入包裹收纳箱215的所有包裹由快递员送往目的地。
31.本实用新型有以下几个特点:
32.(1)为满足中小物流企业降低成本的需求,本实用新型可由单人进行操作,实现了包裹自动分拣,极大提高了分拣效率。
33.(2)设有地址自动识别系统,能自动识别包裹目的地。
34.(3)根据包裹发送的目的地配备有目标包裹收纳箱模块、通过传感器位置识别,机械手可自动将传输通道上的包裹推入目标包裹收纳箱模块,实现自动分拣。
35.(4)针对传输通道上分拣失败的包裹,最后进入回收箱,由人工进行处理。本实用新型与传统的自动分拣系统相比,采用机器配合人工的半自动化方式,减少了人工分拣成本,同时与全自动化机器相比,具有构造简单、成本低、维护方便等优点。特别是目标包裹收纳箱实现模块化,根据包裹目的地的数量,可以自由拼装加减。使分拣系统的使用范围更加广泛。
36.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。