1.本实用新型涉及大型夹具技术领域,具体涉及一种用于大行程重载夹具的自动对中机构。
背景技术:
2.大型夹具主要由夹爪、仿形块和气动手指安装座组成,现有大型夹具的夹爪通常都是平行夹爪,y形夹爪。在大型夹具的使用中,通常会出现夹爪行程不足,不能自动对中的问题,尤其是不对中导致夹具不能抓取问题严重,通常采用的方式为两侧液压杆驱动代替单个气缸,工作流程有两种:
3.(1)双向液压缸驱动:由固定在机架上的液压缸作为驱动件,伸出时,仿形块沿着机架上的导向轴向中心移动,待液压杆至极限位置,仿形压紧工件,夹取完成;
4.(2)三爪卡盘驱动:均匀分布在机架上的三方向液压缸驱动,液压缸同时向中心伸出,带动与之连接的弧形仿形块向中心夹取工件。
5.现有技术的缺点有:
6.1)夹具主要夹取大型零部件,有效行程小,夹取工件少;
7.2)结构上,夹具与机架一体连接,整体结构大,且不能自动对中;
8.3)夹具均采用液压缸驱动,多液压缸间不同步,夹取不精确,液压缸寿命低。
技术实现要素:
9.鉴于以上技术问题,本实用新型的目的是提供一种能自动对中、有效行程长、能准确夹取工件且是单动力驱动的夹具。
10.本实用新型采用了以下技术方案:一种用于大行程重载夹具的自动对中机构,包括单动力机构、框架、左转动杆、中转动杆、右转动杆、左归正板、左仿形块、右归正板和右仿形块。所述左转动杆的一端转动连接于所述左归正板上,另一端转动连接于所述中转动杆的一端;所述中转动杆的另一端转动连接于所述右转动杆的一端;所述右转动杆的另一端转动连接于所述右归正板上;所述中转动杆的中部转动连接于所述框架。所述左仿形块固定连接于所述左归正板;所述右仿形块固定连接于所述右归正板;所述框架包括导向轴,所述左归正板和所述右归正板均滑动安装于所述导向轴上。所述单动力机构安装于所述框架上,能驱动所述左归正板沿所述导向轴移动,并通过所述左转动杆、中转动杆和右转动杆的转动而带动所述右归正板沿所述导向轴移动,使得所述左仿形块和所述右仿形块相向移动或者背离移动,以夹取工件或者放开工件;所述左转动杆、中转动杆和右转动杆的转动轨迹位于同一平面。
11.作为本实用新型的用于大行程重载夹具的自动对中机构的进一步改进,所述框架还包括左侧板、连接杆和右侧板;所述连接杆的两端分别固定连接所述左侧板和所述右侧板;所述导向轴的两端分别固定连接所述左侧板和所述右侧板;所述左归正板和所述右归正板位于所述左侧板和所述右侧板之间;所述中转动杆的中部转动连接于所述连接杆;所
述单动力机构固定于所述左侧板上,其输出端连接于所述左归正板。
12.作为本实用新型的用于大行程重载夹具的自动对中机构的进一步改进,所述框架包括两根平行的所述导向轴,每个导向轴的两端分别固定于所述左侧板和所述右侧板;所述左归正板和所述右归正板均滑动安装于两根所述导向轴上。
13.作为本实用新型的用于大行程重载夹具的自动对中机构的进一步改进,所述中转动杆的中部通过中转动螺栓转动连接于所述连接杆的中部;所述左转动杆的左端通过左转动螺栓转动连接于所述左归正板;所述右转动杆的右端通过右转动螺栓转动连接于所述右归正板。
14.作为本实用新型的用于大行程重载夹具的自动对中机构的进一步改进,所述左归正板、所述右归正板、所述左侧板和所述右侧板相互平行;所述连接杆和所述导向轴相互平行;所述连接杆垂直于所述左归正板;所述连接杆安装于所述左归正板和所述右归正板的上端;所述所述左仿形块固定于所述左归正板的下端,所述右仿形块固定于所述右归正板的下端。
15.作为本实用新型的用于大行程重载夹具的自动对中机构的进一步改进,所述单动力机构包括气缸,所述气缸固定于所述左侧板的外侧面,所述气缸的输出轴无接触穿过所述左侧板并连接于所述左归正板。
16.作为本实用新型的用于大行程重载夹具的自动对中机构的进一步改进,所述气缸的输出轴通过浮动接头连接于所述左归正板。
17.作为本实用新型的用于大行程重载夹具的自动对中机构的进一步改进,所述自动对中机构还包括缓冲垫块和重荷载液压缓冲器,其安装方式为:所述缓冲垫块固定于所述左仿形块上,所述重荷载液压缓冲器固定于所述右仿形块上;或者为所述缓冲垫块固定于所述右仿形块上,所述重荷载液压缓冲器固定于所述左仿形块上。所述左仿形块和所述右仿形块相向移动以夹取工件时,所述重荷载液压缓冲器抵接于所述缓冲垫块,减缓所述左仿形块和所述右仿形块相互靠近的冲击力。
18.作为本实用新型的用于大行程重载夹具的自动对中机构的进一步改进,所述自动对中机构包括两组缓冲垫块和重荷载液压缓冲器的组合,分别安装在所述左仿形块和所述右仿形块的接触线的两端。
19.作为本实用新型的用于大行程重载夹具的自动对中机构的进一步改进,所述左仿形块和所述右仿形块的前端均为v形的开口,相互接触后,形成菱形空间,用于夹取工件。
20.本实用新型的用于大行程重载夹具的自动对中机构的有益效果是:
21.1)单动力机构能驱动左归正板沿导向轴移动,并通过左转动杆、中转动杆和右转动杆的转动而带动所述右归正板沿所述导向轴移动,由于中转动杆的中部转动连接于框架,平衡了两侧速度,实现了自动对中,使得所述左仿形块和所述右仿形块能同步移动,使得工件能被稳定夹取,实现提高夹取成功率与夹取精度的目的。
22.2)由两侧动力源夹持改为单侧驱动夹持,单动力源的有效驱动行程为原来的两倍。
23.3)结构紧凑,易与其他工位配合安装。
附图说明
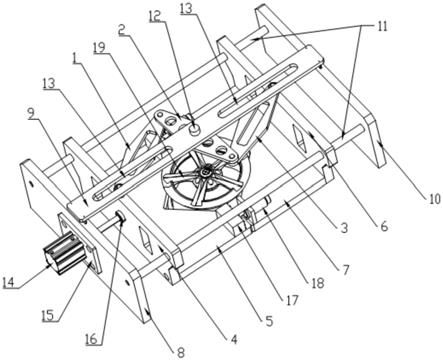
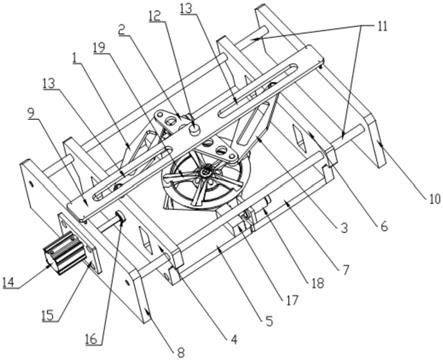
24.图1是本实用新型实施例的用于大行程重载夹具的自动对中机构的结构示意图。
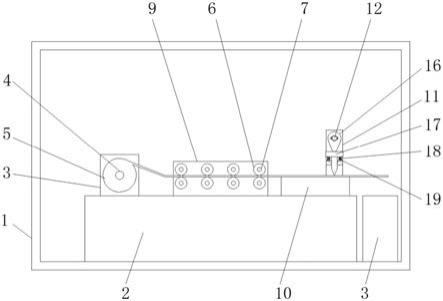
25.图2是本实用新型实施例的用于大行程重载夹具的自动对中机构在准备夹取工件的原位状态的俯视图。
26.图3是本实用新型实施例的用于大行程重载夹具的自动对中机构在夹取了工件的俯视图。
27.图4是本实用新型实施例的用于大行程重载夹具的自动对中机构的正视角示意图。
28.附图标记:左转动杆1、中转动杆2、右转动杆3、左归正板4、左仿形块5、右归正板6、右仿形块7、左侧板8、连接杆9、右侧板10、导向轴11、中转动螺栓12、条形槽13、气缸14、安装座15、浮动接头16、缓冲垫块17、重荷载液压缓冲器18、轮毂19。
具体实施方式
29.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制本实用新型要求保护的范围,而仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
30.如图1所示,一种用于大行程重载夹具的自动对中机构,包括单动力机构、框架、左转动杆1、中转动杆2、右转动杆3、左归正板4、左仿形块5、右归正板6和右仿形块7。
31.所述左转动杆1的一端转动连接于所述左归正板4的上方中间位置,另一端转动连接于所述中转动杆2的一端。所述中转动杆2的另一端转动连接于所述右转动杆3的一端。所述右转动杆3的另一端转动连接于所述右归正板6的上方中间位置。
32.所述框架包括左侧板8、连接杆9、右侧板10和两根平行的导向轴11。所述连接杆9的两端分别固定连接所述左侧板8和所述右侧板10的上方中间处,此为优选实施方式,还可以是连接在非中间处的其他实施方式。
33.每个导向轴11的两端分别固定连接于所述左侧板8和所述右侧板10的侧面处。所述左归正板4和所述右归正板6均滑动安装于两根所述导向轴11上。所述左归正板4和所述右归正板6位于所述左侧板8和所述右侧板10之间。
34.所述中转动杆2的中部通过中转动螺栓12转动连接于所述连接杆9的中部,使得中转动杆2能平衡的转动,使左仿形块5和右仿形块7能自动准确对位。所述连接杆9位于所述中转动螺栓12的两侧还分别设置有条形槽13。所述左转动杆1的左端通过左转动螺栓转动连接于所述左归正板4的上端中间,该左转动螺栓可以插入左侧的条形槽13中,能沿条形槽13滑动,也可以不必插入左侧的条形槽13中。所述右转动杆3的右端通过右转动螺栓转动连接于所述右归正板6,该右转动螺栓可以插入右侧的条形槽13中,能沿条形槽13滑动,也可以不必插入左侧的条形槽13中,不影响装置运行。
35.所述左归正板4、所述右归正板6、所述左侧板8和所述右侧板10相互平行。所述连接杆9和所述导向轴11相互平行。所述连接杆9垂直于所述左归正板4。所述连接杆9安装于
所述左归正板4和所述右归正板6的上端。所述所述左仿形块5固定于所述左归正板4的下端,所述右仿形块7固定于所述右归正板6的下端。
36.所述单动力机构包括气缸14,所述气缸14固定于安装座15,安装座15固定在所述左侧板8的外侧面,所述气缸14的输出轴无接触穿过所述安装座15和左侧板8并通过浮动接头16连接于所述左归正板4。气缸14能驱动所述左归正板4沿所述导向轴11移动,并通过所述左转动杆1、中转动杆2和右转动杆3的转动而带动所述右归正板6沿所述导向轴11移动,使得所述左仿形块5和所述右仿形块7相向移动或者背离移动,以夹取工件或者放开工件。其中,所述左转动杆1、中转动杆2和右转动杆3的转动轨迹位于同一平面或者是相贴合的平面上。
37.所述自动对中机构还包括两组缓冲垫块17和重荷载液压缓冲器18的组合,分别安装在所述左仿形块5和所述右仿形块7的接触线的两端。其具体安装方式可以是:所述缓冲垫块17固定于所述左仿形块5上,所述重荷载液压缓冲器18固定于所述右仿形块7上,如图1;或者为所述缓冲垫块17固定于所述右仿形块7上,所述重荷载液压缓冲器18固定于所述左仿形块5上。所述左仿形块5和所述右仿形块7相向移动以夹取工件时,所述重荷载液压缓冲器18抵接于所述缓冲垫块17,减缓所述左仿形块5和所述右仿形块7相互靠近的冲击力。
38.其中,所述左仿形块5和所述右仿形块7的前端可以是v形的开口,相互接触后,形成菱形空间,用于夹取工件。所述左仿形块5和所述右仿形块7的前端还可以是弧形开口,开口处可以安装缓冲垫,以夹紧工件并能避免损坏工件。图1中的轮毂19为待夹取的工件。
39.本实用新型的用于大行程重载夹具的自动对中机构的工作工序如下。
40.如图2所示,为未夹取工件的自动对中机构的原位图,其中当工件达到指定位置后,按动电源开关,三位五通电磁阀起作用由排气变为进气,气缸14输出轴被气体推动而伸出,以夹取工件。选择三位五通电磁阀原因是空气压缩机停电时,电磁阀保持中位气体不会泄露,保持工件夹持位置,防止事故发生。
41.如图3所示,气缸14的输出轴向右推出,通过导杆11的导向作用,气缸14推动左归正板4向右移动,左转动杆1、中转动杆2和右转动杆3的组合受到推力作用作逆时针转动,左仿形块5和右仿形块7相互向中间靠拢夹紧,中转动杆2通过中心支点进行平衡两侧速度,达到两仿形块至中心轴线距离一致,实现提高夹取成功率与夹取精度的目的。
42.如图4所示,为能正确完成工序,其中当左仿形块5和右仿形块7夹紧时,左右两端冲击载荷大,为仿形块质量乘以加速度,普通的液压缓冲器不能满足要求,选择重荷载液压缓冲器18,另一端选择缓冲垫块17以尽量减少缓冲力,减少对气缸14的冲击力,以增加气缸14使用寿命。
43.以上所描述的仅是本实用新型的部分实施例,而不是全部的实施例,本实用新型的实施例的详细描述并非旨在限制本实用新型要求保护的范围,而仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。