1.本实用新型是一种用于停车设备中自带转盘的搬运台车,应用于各类垂直升降类或平面移动类停车设备中。
背景技术:
2.目前,智能库在停车设备市场中所占份额越来越大,且自动化程度越来越高。带转盘的搬运台车属于智能库停车设备的核心设备,是智能化全自动的高端设备。
3.该设备通过激光测距的定位及光通讯实时数据交换,能根据系统给出的指令实现横向移动搬运汽车,并预先根据汽车出库的行车路线事先将汽车调头放置。现有的带转盘的搬运台车是有车台板的,当取完汽车以后需要把空板送回到库位上去,这将大大影响车库存取车辆的效率。
技术实现要素:
4.本实用新型要解决的问题是现有技术存在的上述问题,旨在提供一种新型的用于停车设备中自带转盘的搬运台车。
5.本实用新型采用技术方案如下:
6.一种用于停车设备中自带转盘的搬运台车,包括构成搬运台车主体的下框,以及构成承载搬运器和汽车的上框,还包括旋转马达组、行走轮组、电源组件和回转支撑,所述的回转支撑通过旋转马达组带动上框相对于下框旋转;所述的行走轮组设于下框两边,实现搬运台车左右横移;所述电源组件对旋转马达组与行走轮组供电。
7.作为优选,所述的回转支撑为转盘轴承,其内圈连接在下框上,外圈连接在上框上,通过旋转马达组带动外圈,使上框旋转。
8.作为优选,所述的行走轮组包括主动行走轮组和从动行走轮组,所述的主动行走轮组设于下框两边,驱动下框沿横移轨道左右横移;所述的从动行走轮组设于主动行走轮组另一侧随主动行走轮组沿横移轨道左右横移。
9.作为优选,还包括导向轮组,在所述下框的在行走轮组旁沿横移轨道的侧面设有导向轮组。
10.作为优选,还包括缓冲器,所述的下框边缘处设有缓冲器。
11.作为优选,所述的上框与下框之间设有支撑轮,分别于上框0度和180度方向上设置支撑轮。
12.作为优选,还包括旋转到位开关,分别在上框0度和180度方向上共设置了两对旋转到位开关,且与旋转马达组电连接。
13.作为优选,所述的电源组件包括集电刷和与其相匹配的集电轨,所述的集电刷设有两组。
14.作为优选,所述的电源组件还包括设于上框上的电缆卷筒和导线轮组,在位于自带转盘的搬运台车上的搬运器运动过程中电缆卷筒与搬运台车之间的电缆通过导线轮组
换向。
15.作为优选,还包括测距仪和超长光电组,测距仪设于下框侧面;所述的超长光电组安装于下框边缘处,且一高一低设置。
16.与现有技术相比,本实用新型的有益效果包括:
17.本产品是无板式智能库停车设备中的搬运台车,解决了因出入口层场地限制无法前进出库的问题。利用轨道台车巷道比较宽的特点,将转盘设置在搬运台车上,实现汽车在库内180
°
回转,出库时旋转调头和轨道台车行走的同时进行,提高运行效率,将汽车回转掉头再送至升降机,完成前进入库前进出库的要求,不需要司机驾车调头,方便用户。同时,现有的带转盘的搬运台车是有车台板的,当取完汽车以后需要把空板送回到库位上去。而本产品是无板式的,不需要放汽车的车台板,取完车以后不需要回送车台板,提高了车库运行效率。
附图说明
18.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.图1为本产品的结构示意图。
20.图2为本产品另一角度的示意图。
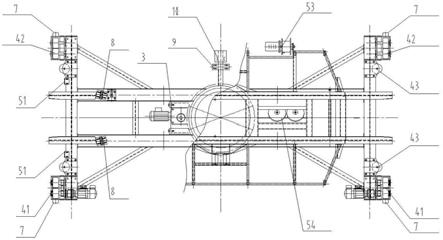
21.图3为本产品应用于停车设备中的示意图。
22.图4为图3中a部放大图。
23.图5为图3中b部放大图。
24.图6为图3中c部放大图。
25.图7为图2停有车辆状态示意图。
26.标号说明:下框1、上框2、旋转马达组3、主动行走轮组41、从动行走轮组42、导向轮组43、集电刷51、集电轨52、电缆卷筒53、导线轮组54、回转支撑6、缓冲器7、支撑轮8、旋转到位开关9、测距仪10、超长光电组11、搬运器12、横移轨道13。
具体实施方式
27.下面结合附图和具体实施方式对本实用新型作进一步的详细说明。
28.实施例:
29.如图1
‑
7所示,本实施例是一种用于停车设备中自带转盘的搬运台车,该设备包括构成搬运台车主体的下框1,以及构成承载搬运器12和汽车的上框2,还包括旋转马达组3、行走轮组、电源组件和回转支撑6,回转支撑6通过旋转马达组3带动上框2相对于下框1旋转;行走轮组设于下框1两边,实现搬运台车左右横移;电源组件对旋转马达组3与行走轮组供电。
30.本实施例的回转支撑6为转盘轴承,其内圈连接在下框1上,外圈连接在上框2上,通过旋转马达组3带动外圈,使上框2旋转;上框2与下框1之间设有支撑轮8,分别于上框0度
和180度方向上设置支撑轮8。本实施例还包括旋转到位开关9,分别在上框0度和180度方向上共设置了两对旋转到位开关9,且与旋转马达组3电连接。
31.本实施例的行走轮组包括主动行走轮组41和从动行走轮组42,主动行走轮组41设于下框1两边,驱动下框1沿横移轨道13左右横移;从动行走轮组42设于主动行走轮组41另一侧随主动行走轮组41沿横移轨道13左右横移。如图5所示,本实施例的主动行走轮组41和从动行走轮组42都采用双轮设计,可以平稳越过轨道间隙。本实施例还包括导向轮组43,在下框1的在行走轮组旁沿横移轨道13的侧面设有导向轮组43。本实施例还包括缓冲器7,在下框1边缘处设有缓冲器7。
32.本实施例的电源组件包括集电刷51和与其相匹配的集电轨52,集电刷51设有两组,集电刷51从集电轨52上取电,提供给搬运台车动力。如图4所示,采用了双集电刷51设计,可以避免搬运台车在运行过程中由于抖动时集电刷51和集电轨52脱离,导致断电突然停止。进一步,电源组件还包括设于上框2上的电缆卷筒53和导线轮组54,在位于自带转盘的搬运台车上的搬运器12运动过程中电缆卷筒53与搬运台车之间的电缆通过导线轮组54换向。
33.如图1和6所示,本实施例还包括测距仪10和超长光电组11,测距仪10设于下框1侧面;超长光电组11安装于下框1边缘处,且一高一低设置。更为具体地,安装在搬运台车前后两端的超长光电组11高低设置,可以增加检测面积(阴影部分),可以对普通汽车和suv汽车都能检测到。超长光电组11在搬运台车横移时全程检测,当汽车出现未拉手刹等原因出现滑动,超出安全范围,超长光电组11检测到后搬运台车立即停止运行,避免车辆损坏。
34.各个部件工作原理及作用:
35.下框1:为自带转盘的搬运台车主体钢架
36.上框2:供承载搬运器12搬运汽车的架体
37.回转支撑6:通过螺丝连接,内圈连接在下框1上,外圈连接在上框2上,通过旋转马达组3带动外圈,使上框2可以旋转。
38.主动行走轮组41:马达通电,通过马达转动能带动行走轮转动,实现搬运台车左右横移。
39.从动行走轮组42:无动力,为随动轮组。
40.导向轮组43:阻止搬运台车在横移过程中出现偏斜,使其能在一定的直线上横移。
41.缓冲器7:设置在搬运台车的四个角上,凸出与搬运台车本体。当搬运台车运行过行程时,缓冲器7保护搬运台车不直接撞上墙体,起缓冲保护作用。
42.旋转马达组3:安装在下框1上,马达输出齿轮与回转支撑6外圈相连,通电后带动回转支撑6外圈旋转。
43.支撑轮8:在上框0度和180度方向上共设置了4组支撑轮8。由于上框2在重载时端部会下挠,支撑轮8组可以对端部做支撑,使上框2旋转到位时不下挠。
44.旋转到位开关9:在上框0度和180度方向上共设置了2对旋转到位开关9,当0度到位开关on时,上框2停止旋转。同样,当180度到位开关on时,上框2也停止旋转。保证了上框2从0度开始旋转到180停止,再次启动时从180开始旋转到0度停止。
45.测距仪10(激光测距仪):安装在下框1的侧面,当搬运台车在运行时,激光测距议可以测出距离,通过系统计算出行走的路程以及所处的位置。
46.集电刷51:安装在搬运台车的单侧并分开2个设置。在横移轨道13上设置集电轨52,集电刷51负责从集电轨52上取电。设置两个可以有效避免搬运台车在运行过程中抖动使一个集电刷51短暂脱离电轨而发生断电。
47.超长光电组11:在搬运台车搬运汽车时,避免汽车发生滑动与周边物体发生刮擦。超长光电组11一高一低设置,可以有效增加检测面积,适用各种普通车和suv汽车的车型。
48.电缆卷筒53:给在搬运台车上的智能搬运器12供电的装置,当搬运器12运行至库位时可拉出电缆线,当搬运器12从库位返回时,可将电缆线收回至电缆卷筒53内。
49.导线轮组54:给电缆线换向,可实现电缆线0度和180方向出线。
50.配备有本产品的停车设备的工作过程:
51.存车:汽车自出入口驶入停车设备——搬运器12进入出入口汽车底部——搬运器12将汽车搬运至搬运台车上——搬运台车横移至目标库位处——搬运器12将汽车存放到库位;
52.取车:搬运器12将汽车搬到搬运台车上——搬运台车一边往出入口横移一边旋转——搬运台车横移到出入口处,并将汽车调转车头——搬运器12将汽车搬至出入口——司机驾车离开。
53.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。