1.本实用新型涉及舵机平台控制技术领域,具体涉及一种智能化舵机自稳云台。
背景技术:
2.目前传统的云台大都是固定在一个平台上,尤其是应用场景为能够观察几公里以外图像的设备,这导致了其重量会有几公斤直到几十公斤。然而为了保证监控设备的安全,需要将监控设备牢牢的固定在云台上,使用时监控设备会随着运动物体的上下左右摇摆而摇摆,在一些极端情况下运动物体的颠簸幅度很大,而依靠人工跟踪目标几乎是不可能的。因此监控设备经常捕捉不到目标,导致达不到监控的效果。
3.目前来说,传统的云台采用无刷电机作为驱动器,无刷电机的力矩小,无法满足重型器材的稳定方案。且需要将监控设备牢牢的固定在云台上,因此监控设备会随着运动物体的上下左右摇摆而摇摆,需要解决稳定问题,无法很好的监控和捕捉目标。
技术实现要素:
4.发明目的:本实用新型提出一种智能化舵机自稳云台,使监视设备时时保持与目标物的相对稳定状态,保证监控设备拍摄画面的稳定性。
5.技术方案:本实用新型所述智能化舵机自稳云台,包括云台固定座、控制器、俯仰角控制舵机、横滚角控制舵机、六轴加速度仪;所述云台固定座包括l型支架和支撑板,所述l型支架的两个外侧边分别与所述俯仰角控制舵机、横滚角控制舵机相连,所述支撑板固定在l型支架内侧边底部,所述六轴加速度仪设置在所述支撑板中部;所述横滚角控制舵机底端通过支杆固定在底座上,所述控制器设置在底座内;所述六轴加速度仪采集所述云台固定座的姿态角数据并传输至所述控制器,所述控制器输出pid控制量至所述俯仰角控制舵机和/或横滚角控制舵机,所述俯仰角控制舵机和/或横滚角控制舵机运动对所述云台固定座进行调平。
6.进一步完善上述技术方案,所述俯仰角控制舵机包括俯仰角舵机和控制组件,所述控制组件包括第一u型支架、第二u型支架、第三u型支架,所述第一u型支架顶部、底部固定在所述l型支架外侧边上,所述第二u型支架与所述第一u型支架呈背靠背固定,所述第三u型支架与第二u型支架呈对接相连且连接处为铰接,所述俯仰角舵机与第三u型支架固定相连。
7.进一步地,所述l型支架包括垂直相连的短边支板、长边支板,所述俯仰角控制舵机与短板支板的外侧相连,所述支撑板与短板支板的内侧相连。
8.进一步地,所述长边支板下半边设有矩形开口,所述短边支板在与长边支板的拐角连接处设有矩形开口。通过设置矩形开口,减轻整体结构重量。
9.进一步地,所述控制器型号为nxpk60单片机,所述六轴加速度仪为mpu6050。
10.有益效果:与现有技术相比,本实用新型的优点在于:本实用新型通过支撑板固定监控设备,支撑板外侧通过l型支架连接俯仰角控制舵机、横滚角控制舵机,能够保证监控
设备稳固,减轻了监控设备波动,通过在监控设备外侧两个直角方向分别进行俯仰角、横滚角控制,使监视设备时时保持与目标物的相对稳定状态,保证监控设备拍摄画面的稳定性。
11.本实用新型提供的结构以及俯仰角控制舵机、横滚角控制舵机的调节方式,舵机扭矩大,易于控制,适合于作为自稳云台的驱动器,可以用于防抖拍摄,在一些极端不稳定的情况下也可以拍摄到清晰稳定的画面,能够满足重型器材的稳定方案。
12.本实用新型具有实用和市场价值,并可以广泛的应用到生产生活中,为监控要求高的场景及运动目标的拍摄带来更好的体验和改变。
附图说明
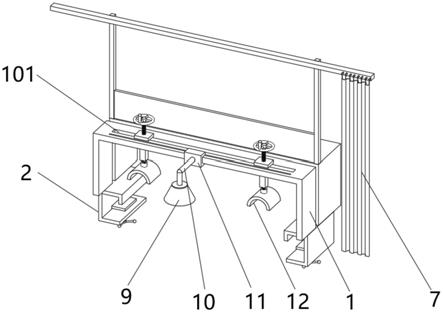
13.图1是本实用新型的立体结构示意图;
14.图2是本实用新型的主视图;
15.图3是本实用新型的左视图;
16.图4是本实用新型的俯视图;
17.图5是本实用新型的仰视图。
18.图中:1为俯仰角控制舵机;2为横滚角控制舵机;3为六轴加速度仪;4为底座;5为云台固定座。
具体实施方式
19.下面通过附图对本实用新型技术方案进行详细说明,但是本实用新型的保护范围不局限于所述实施例。
20.如图1至图4所示的智能化舵机自稳云台,包括俯仰角控制舵机1、横滚角控制舵机2、六轴加速度仪3、底座4、云台固定座5,底座4内设有控制器。六轴加速度仪3型号为mpu6050,控制器包括单片机、电池和稳压电路,单片机采用了32位nxpk60单片机实现浮点数据处理、解算、输出控制量。
21.云台固定座5包括l型支架和支撑板,l型支架包括垂直相连的短边支板、长边支板,长边支板下半边设有矩形开口,短边支板在与长边支板的拐角连接处设有矩形开口。长边支板、短边支板的外侧边分别与俯仰角控制舵机1、横滚角控制舵机2相连,支撑板固定在短边支板内侧边底部,六轴加速度仪3设置在支撑板中部。横滚角控制舵机2底端通过支杆固定在底座4上。
22.俯仰角控制舵机1包括俯仰角舵机和控制组件,控制组件包括第一u型支架、第二u型支架、第三u型支架,第一u型支架顶部、底部固定在短边支架外侧边上,第二u型支架与第一u型支架呈背靠背固定,第三u型支架与第二u型支架呈对接相连且连接处为铰接,俯仰角舵机与第三u型支架固定相连。横滚角控制舵机2的控制方式与俯仰角类似,仅控制角度不同。六轴加速度仪3采集云台固定座5的姿态角数据并传输至控制器4,控制器输出pid控制量至俯仰角控制舵机1和/或横滚角控制舵机2,俯仰角控制舵机1和/或横滚角控制舵机2运动对云台固定座5进行动态调平。
23.具体应用过程如下:底座4安装在运动物体的顶部,将监控设备固定在云台固定座5上。首先,上电之后,单片机进行初始化,然后通过iic接口采集六轴加速度仪3的数据,经过数据转换处理之后,得到三个方向的姿态数据,只使用两个方向的数据,通过计算出来的
姿态角与预期姿态角进行比对,通过pid负反馈控制,输出舵机控制量,俯仰角控制舵机1和横滚角控制舵机2实现云台固定座5的控制,自动的调整监视设备的绝对水平姿态,在小于30度的摆幅下能实现图像高度稳定,使监控设备保持与目标物的相对稳定状态,从而保证了图像画面的稳定。
24.本实用新型智能化舵机自稳云台的高速姿态是由两台执行电动机来实现,电动机接受来自控制器的信号精确地运行定位,舵机扭矩大,易于控制,满足重型器材使用的稳定性,适合于作为自稳云台的驱动器,实现平台自动稳定过程控制,在一些特殊场合下能使平台始终保持水平状态。在控制信号的作用下,云台上的监控设备既可自动扫描监视区域,也可在监控中心值班人员的操纵下跟踪监视对象,适用于对大范围进行扫描监视。
25.如上所述,尽管参照特定的优选实施例已经表示和表述了本实用新型,但其不得解释为对本实用新型自身的限制。在不脱离所附权利要求定义的本实用新型的精神和范围前提下,可对其在形式上和细节上作出各种变化。
技术特征:
1.一种智能化舵机自稳云台,其特征在于:包括云台固定座、控制器、俯仰角控制舵机、横滚角控制舵机、六轴加速度仪;所述云台固定座包括l型支架和支撑板,所述l型支架的两个外侧边分别与所述俯仰角控制舵机、横滚角控制舵机相连,所述支撑板固定在l型支架内侧边底部,所述六轴加速度仪设置在所述支撑板中部;所述横滚角控制舵机底端通过支杆固定在底座上,所述控制器设置在底座内;所述六轴加速度仪采集所述云台固定座的姿态角数据并传输至所述控制器,所述控制器输出pid控制量至所述俯仰角控制舵机和/或横滚角控制舵机,所述俯仰角控制舵机和/或横滚角控制舵机运动对所述云台固定座进行调平。2.根据权利要求1所述的智能化舵机自稳云台,其特征在于:所述俯仰角控制舵机包括俯仰角舵机和控制组件,所述控制组件包括第一u型支架、第二u型支架、第三u型支架,所述第一u型支架顶部、底部固定在所述l型支架外侧边上,所述第二u型支架与所述第一u型支架呈背靠背固定,所述第三u型支架与第二u型支架呈对接相连且连接处为铰接,所述俯仰角舵机与第三u型支架固定相连。3.根据权利要求2所述的智能化舵机自稳云台,其特征在于:所述l型支架包括垂直相连的短边支板、长边支板,所述俯仰角控制舵机与短板支板的外侧相连,所述支撑板与短板支板的内侧相连。4.根据权利要求3所述的智能化舵机自稳云台,其特征在于:所述长边支板下半边设有矩形开口,所述短边支板在与长边支板的拐角连接处设有矩形开口。5.根据权利要求1所述的智能化舵机自稳云台,其特征在于:所述控制器型号为nxpk60单片机,所述六轴加速度仪为mpu6050。
技术总结
本实用新型公开的一种智能化舵机自稳云台,包括云台固定座、控制器、俯仰角控制舵机、横滚角控制舵机、六轴加速度仪;云台固定座包括L型支架和支撑板,L型支架的两个外侧边分别与俯仰角控制舵机、横滚角控制舵机相连,支撑板固定在L型支架内侧边底部,六轴加速度仪设置在支撑板中部;横滚角控制舵机底端通过支杆固定在底座上,控制器设置在底座内;六轴加速度仪采集云台固定座的姿态角数据并传输至控制器,控制器输出PID控制量至俯仰角控制舵机和/或横滚角控制舵机,俯仰角控制舵机和/或横滚角控制舵机运动对云台固定座进行调平。本实用新型使监视设备时时保持与目标物的相对稳定状态,保证监控设备拍摄画面的稳定性。保证监控设备拍摄画面的稳定性。保证监控设备拍摄画面的稳定性。
技术研发人员:韩翔 邵涛
受保护的技术使用者:南京亚太嘉园智慧空间营造有限公司
技术研发日:2021.06.18
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。