1.本实用新型涉及安规测试的技术领域,特别是涉及一种机器人安规测试设备。
背景技术:
2.安规测试仪用于高电压元、器件的耐压测量试验(用交、直流耐压仪),如硅堆等。安规测试仪主要是用来检测产品是否漏电、是否接地良好、会不会伤害人身安全的专用仪器,主要检测项目有电压、泄漏电流、绝缘电阻和接地电阻。
3.现有的安规测试流程是在检测产品时,需要将待检产品放置在仿形工装盘内,仿形工装盘内设有电流连接组件,之后拔插夹爪将安规测试仪插入至插座内,对待检产品进行检测,每当检测完一组后,再启动链条驱动组件,进行下一组的传输检测即可,然而待检产品放入仿形工装盘后,易出现接触不良的情况,导致检测准确性降低。
技术实现要素:
4.为解决上述技术问题,本实用新型提供一种可避免待检产品出现电源接触不良的现象,保证检测准确性的机器人安规测试设备。
5.本实用新型的一种机器人安规测试设备,包括工作台、六轴机械手、链条驱动组件、多组导电底座、多组仿形工装盘和安规测试仪,工作台底端设有四组支腿,六轴机械手安装在工作台顶端,六轴机械手的输出端设有拔插夹爪,链条驱动组件固定安装在工作台左端,多组导电底座固定安装在链条驱动组件上,多组仿形工装盘分别安装在多组导电底座顶端,仿形工装盘与导电底座电连接,工作台顶端设有固定架,安规测试仪可插入至固定架内,每组导电底座顶端均设有插座,多组仿形工装盘内均设有固定装置,每组固定装置包括前滑杆、两组后滑杆、前夹板、后夹板、三组弹簧和三组限位板,前滑杆滑动穿过仿形工装盘前端,两组后滑杆均滑动穿过仿形工装盘后端,前夹板和前滑杆固定连接,后夹板和两组后滑杆固定连接,三组弹簧分别套设在两组后滑杆和前滑杆上,三组限位板分别和两组后滑杆与前滑杆固定连接。
6.本实用新型的一种机器人安规测试设备,还包括多组滚轴,每组仿形工装盘左右两侧内壁均设有安装架,多组滚轴分别转动安装在多组安装架内。
7.本实用新型的一种机器人安规测试设备,前夹板和后夹板的相对面均设有橡胶垫。
8.本实用新型的一种机器人安规测试设备,仿形工装盘前后两端的通孔内均设有滑套,前滑杆和后滑杆均可滑动穿过滑套。
9.本实用新型的一种机器人安规测试设备,还包括四组减震座,四组减震座分别安装在工作台底端和四组支腿顶端。
10.本实用新型的一种机器人安规测试设备,还包括四组脚轮,四组脚轮分别安装在四组支腿底端。
11.本实用新型的一种机器人安规测试设备,还包括把手,把手和工作台右端固定连
接。
12.本实用新型的一种机器人安规测试设备,还包括四组横梁,四组横梁分别固定安装在相邻两组支腿之间。
13.与现有技术相比本实用新型的有益效果为:将待检产品放置在仿形工装盘内时,分别前后压动前夹板和后夹板,带动两组后滑杆和一组前滑杆向外滑动,同时带动三组弹簧收缩,然后将待检产品放入仿形工装盘内,再松开前夹板和后夹板,使三组弹簧归位,前夹板和后夹板互相配合将待检产品固定住即可,通过上述设置,可避免待检产品出现电源接触不良的现象,保证检测的准确性。
附图说明
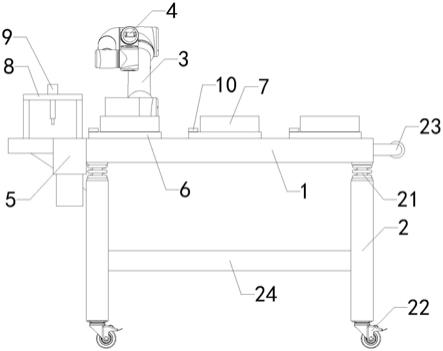
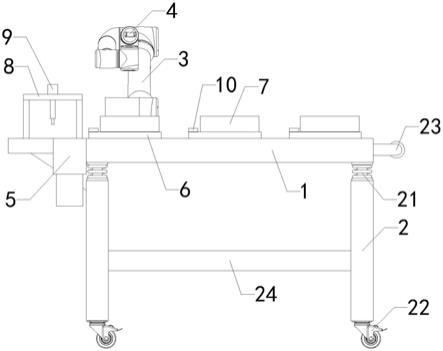
14.图1是本实用新型的结构示意图;
15.图2是六轴机械手和拔插夹爪连接的轴侧结构示意图;
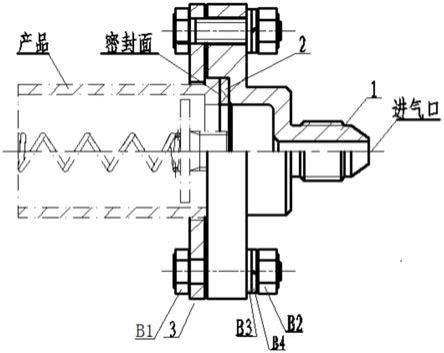
16.图3是仿形工装盘和后滑杆等连接的俯视剖面结构示意图;
17.图4是仿形工装盘的轴侧结构示意图;
18.附图中标记:1、工作台;2、支腿;3、六轴机械手;4、拔插夹爪;5、链条驱动组件;6、导电底座;7、仿形工装盘;8、固定架;9、安规测试仪;10、插座;11、前滑杆;12、后滑杆;13、前夹板;14、后夹板;15、弹簧;16、限位板;17、安装架;18、滚轴;19、橡胶垫;20、滑套;21、减震座;22、脚轮;23、把手;24、横梁。
具体实施方式
19.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
20.如图1至图4所示,本实用新型的一种机器人安规测试设备,包括工作台1、六轴机械手3、链条驱动组件5、多组导电底座6、多组仿形工装盘7和安规测试仪9,工作台1底端设有四组支腿2,六轴机械手3安装在工作台1顶端,六轴机械手3的输出端设有拔插夹爪4,链条驱动组件5固定安装在工作台1左端,多组导电底座6固定安装在链条驱动组件5上,多组仿形工装盘7分别安装在多组导电底座6顶端,仿形工装盘7与导电底座6电连接,工作台1顶端设有固定架8,安规测试仪9可插入至固定架8内,每组导电底座6顶端均设有插座10,多组仿形工装盘7内均设有固定装置,每组固定装置包括前滑杆11、两组后滑杆12、前夹板13、后夹板14、三组弹簧15和三组限位板16,前滑杆11滑动穿过仿形工装盘7前端,两组后滑杆12均滑动穿过仿形工装盘7后端,前夹板13和前滑杆11固定连接,后夹板14和两组后滑杆12固定连接,三组弹簧15分别套设在两组后滑杆12和前滑杆11上,三组限位板16分别和两组后滑杆12与前滑杆11固定连接;将待检产品放置在仿形工装盘7内时,分别前后压动前夹板13和后夹板14,带动两组后滑杆12和一组前滑杆11向外滑动,同时带动三组弹簧15收缩,然后将待检产品放入仿形工装盘7内,再松开前夹板13和后夹板14,使三组弹簧15归位,前夹板13和后夹板14互相配合将待检产品固定住即可,通过上述设置,可避免待检产品出现电源接触不良的现象,保证检测的准确性。
21.本实用新型的一种机器人安规测试设备,还包括多组滚轴18,每组仿形工装盘7左右两侧内壁均设有安装架17,多组滚轴18分别转动安装在多组安装架17内;便于待检产品
的取放,提供便利性。
22.本实用新型的一种机器人安规测试设备,前夹板13和后夹板14的相对面均设有橡胶垫19;通过设置橡胶垫19,可增大摩擦,防止待检产品滑动,提高稳定性。
23.本实用新型的一种机器人安规测试设备,仿形工装盘7前后两端的通孔内均设有滑套20,前滑杆11和后滑杆12均可滑动穿过滑套20;通过设置滑套20,便于前滑杆11和后滑杆12的滑动,提高顺畅性。
24.本实用新型的一种机器人安规测试设备,还包括四组减震座21,四组减震座21分别安装在工作台1底端和四组支腿2顶端;通过设置减震座21,可起到减震的作用。
25.本实用新型的一种机器人安规测试设备,还包括四组脚轮22,四组脚轮22分别安装在四组支腿2底端;通过设置脚轮22,便于整体装置的移动,提高灵活性。
26.本实用新型的一种机器人安规测试设备,还包括把手23,把手23和工作台1右端固定连接;通过设置把手23,便于工作人员推动整体装置移动,提高实用性。
27.本实用新型的一种机器人安规测试设备,还包括四组横梁24,四组横梁24分别固定安装在相邻两组支腿2之间;通过设置横梁24,可加强四组支腿2之间连接的稳定性。
28.本实用新型的一种机器人安规测试设备,其在工作时,将待检产品放置在仿形工装盘7内时,分别前后压动前夹板13和后夹板14,带动两组后滑杆12和一组前滑杆11向外滑动,同时带动三组弹簧15收缩,然后将待检产品放入仿形工装盘7内,再松开前夹板13和后夹板14,使三组弹簧15归位,前夹板13和后夹板14互相配合将待检产品固定住即可,设置安装架17和滚轴18,便于待检产品在仿形工装盘7内的取放,提供便利性,减震座21可起到减震的作用,当需要移动整体装置时,工作人员握住把手23,推动工作台1,带动脚轮22转动即可。
29.本实用新型的一种机器人安规测试设备,其安装方式、连接方式或设置方式均为常见机械方式,只要能够达成其有益效果的均可进行实施。
30.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。