1.本实用新型涉及骨科手术机器人技术领域,具体而言,涉及一种末端执行器。
背景技术:
2.在骨科技术领域,在腿骨骨折复位的手术过程中,可以利用磁导航系统,将腿骨的ct或mri二维图像进行三维重建,建立出腿骨的三维模型,利用探针和六自由度参考工具对腿骨进行定位,完成腿骨与三维模型的相关联,当腿骨运动时,其三维模型也会相对运动,通过观察腿骨的三维模型的复位情况,就可以体现出腿骨的复位情况,从而来完成腿骨骨折的复位。
3.磁导航系统可大大减少复杂骨科手术的风险,骨科手术利用导航系统在术前制定手术计划和术中导航,可以在手术过程中跟踪手术器械,并将手术器械的位置在病人术前或术中的影像上实时更新显示出来,让手术医生随时知道手术器械的位置同病患解剖结构的关系,同时又得到导航帮助,如此使得手术的过程更加精确。
4.参考专利号为201310700436.7的发明专利,就公开了一种磁导航系统。
5.参考专专利号为201711112547.0的发明申请,就公开了一种用于磁导航系统的骨科定位机器人基座。
6.参考专利申请号为201910468654.x的发明申请,其公开了一种基于电磁导航技术的用于辅助骨折复位的固定支架。
7.然而,现有骨科机器人的结构中,定位机器人的机械臂上安装有末端执行器,末端执行器只有一个工具接口,工具接口单一;此外不能固定导航识别装置。此外,目前的末端执行器一般为金属材质而不能实现患者和设备的隔离。
技术实现要素:
8.本实用新型就是为了解决现有骨科机器人的末端执行器工具接口单一的技术问题,提供了一种接口多样的末端执行器。
9.本实用新型提供的末端执行器,包括杆体(140)、安装台(130)、第一固定台(110
‑
1)和第二固定台(110
‑
2),所述安装台(130)与杆体(140)的一端固定连接,第一固定台(110
‑
1)和第二固定台(110
‑
2)分别与杆体(140)的另一端固定连接,第一固定台(110
‑
1)和第二固定台(110
‑
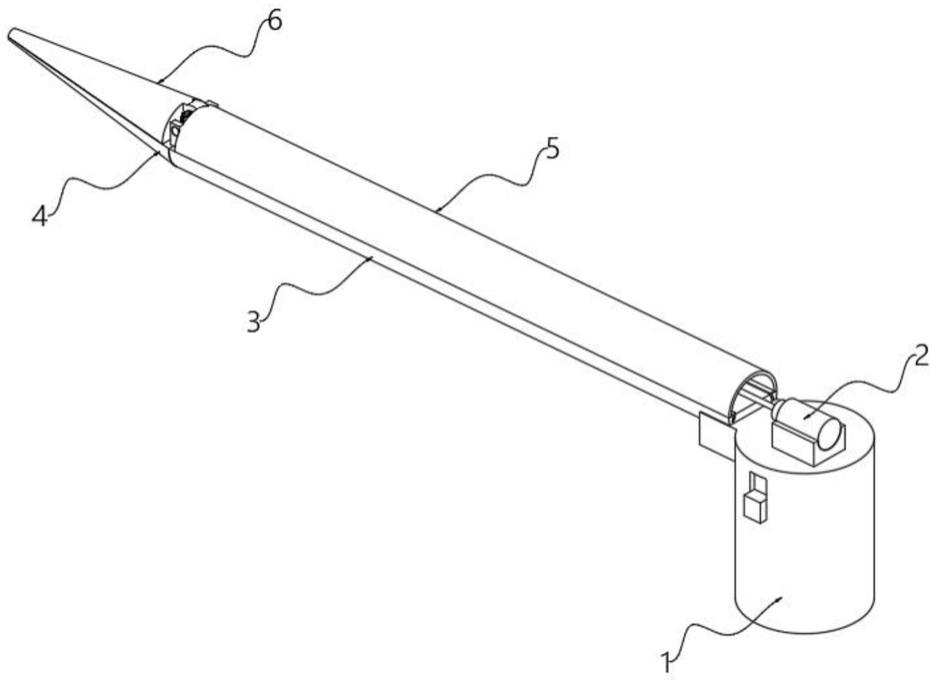
2)对称布置于杆体(140)的两侧;
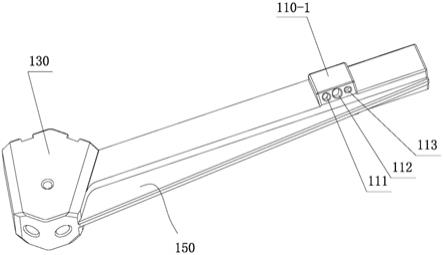
10.杆体(140)的端部沿轴向方向设有连接孔(101),杆体(140)的端部沿径向方向设有第一固定辅助螺纹孔(102)、第二固定辅助螺纹孔(103),所述第一固定辅助螺纹孔(102)与连接孔(101)连通,所述第二固定辅助螺纹孔(103)与连接孔(101)连通;
11.第一固定台(110
‑
1)的前端面设有第一斜面(114),所述第一斜面(114)上设有第一定位孔(111)、第二定位孔(113)和安装孔(112);所述第二固定台(110
‑
2)的前端面设有第二斜面,第二斜面设有两个定位孔和一个安装孔;
12.安装台130上设有两个不同方向的第一安装孔(131)、第二安装孔(132),安装台13
设有锁定螺纹孔(135),锁定螺纹孔(135)与第一安装孔(131)连通,锁定螺纹孔(135)与第二安装孔(132)连通。
13.优选地,末端执行器还包括加强连接片(150),加强连接片(150)固定连接于杆体(140)和安装台(130)之间。
14.本实用新型的有益效果是,(1)具有多个末端工具安装孔,减少了末端执行器的更换次数,提高了手术效率。(2)集成了导航识别装置安装位置,保证了导航识别器与导航系统的角度,并提高了导航器视野(空间)的利用率。(3)采用高介电系数材料。在满足机械性能的基础上,满足对患者和设备的静电隔离。
15.本实用新型进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
附图说明
16.图1是末端执行器的立体图;
17.图2是末端执行器的立体图。
18.图3是末端执行器安装在定位机器人的机械臂上的结构示意图。
19.附图中符号说明:
20.110
‑
1.第一固定台,110
‑
2.第二固定台,140.杆体,130.安装台,300.机械臂,400.末端定位套筒,500.参考架,600.参考架,700.锁定销。
具体实施方式
21.以下参照附图,以具体实施例对本实用新型作进一步详细说明。
22.如图1
‑
2所示,末端执行器包括杆体140、安装台130、第一固定台110
‑
1、第二固定台110
‑
2、加强连接片150,安装台130与杆体140的一端固定连接,第一固定台110
‑
1和第二固定台110
‑
2分别与杆体140的另一端固定连接,第一固定台110
‑
1和第二固定台110
‑
2对称布置于杆体140的两侧。加强连接片150固定连接于杆体140和安装台130之间。
23.杆体140的端部沿轴向方向设有用于与机器人连接使用的连接孔101。杆体140的端部沿径向方向设有第一固定辅助螺纹孔102、第二固定辅助螺纹孔103。第一固定辅助螺纹孔102与连接孔101连通,第二固定辅助螺纹孔103与连接孔101连通。
24.如图3所示,机械臂300的末端插入连接孔101中,用两个螺钉分别安装在第一固定辅助螺纹孔102、第二固定辅助螺纹孔103,两个螺钉的前端顶压在位于连接孔101中机械臂300的末端上,实现固定连接。
25.第一固定台110
‑
1和第二固定台110
‑
2用来固定导航识别装置,比如被动红外识别器。整个固定台比较厚重,第一固定台110
‑
1的前端面设有第一斜面114,这样既保证的整个固定台的强度,又能让导航识别器可以正对导航器,提高了导航精度;第一斜面114上设有第一定位孔111、第二定位孔113、以及安装孔112。第二固定台110
‑
2的结构与第一固定台110
‑
1相同,第二固定台110
‑
2的前端面设有第二斜面,第二斜面设有两个定位孔和一个安装孔。
26.安装台130用于与末端执行机构相连,安装台130上设有两个不同方向的第一安装孔131、第二安装孔132,第一安装孔131、第二安装孔132可以满足机器人在对不同部位实施手术时的手术要求。第一安装孔131、第二安装孔132与机械臂的轴向成不同的夹角,这样在
同一次安装就能就能满足在不同位置时的手术,减少了末端执行器的更换次数,提高了手术效率。安装台13设有锁定螺纹孔135,锁定螺纹孔135与第一安装孔131连通,锁定螺纹孔135与第二安装孔132连通。
27.如图3所示,末端定位套筒400插入第一安装孔131中,锁定销700设有外螺纹,锁定销700的外螺纹与锁定螺纹孔135连接,锁定销700的前端顶压在末端定位套筒400上,实现末端定位套筒400的安装定位。
28.安装台130的端面设有第一槽133和第二槽134,第一安装孔131的上端位于第一槽133中,第二安装孔132位于第二槽134中。第一槽133、第二槽134的作用是限制与其连接的定位套筒径向上的转动。
29.杆体140设计巧妙,其强度能满足大多数手术的要求,加强连接片150在降低了整体重量的同时,增加了整个末端执行器的强度。
30.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,采用其它形式的零件构型、驱动装置以及连接方式不经创造性的设计与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。