技术特征:
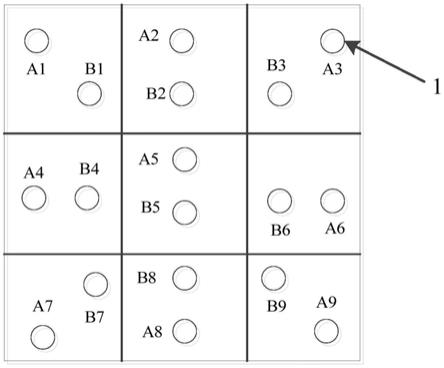
1.一种魔方机器人颜色识别系统,其特征在于,所述系统包括:磁力传感器和磁钢,所述磁力传感器设置在魔方承载台内,每个魔方块的每个面中设置有不同磁性的磁钢,不同磁性的磁钢在魔方块中代表不同的魔方块颜色,通过磁力传感器检测当前魔方块中磁体的磁性,判断当前魔方块的颜色,利用机械手臂完成魔方拼复。2.如权利要求1所述的一种魔方机器人颜色识别系统,其特征在于,所述魔方块中设置有两个磁钢安装位置ax bx,每个面对应具有九个魔方块的面,具体包括:a1 b1;a2 b2;a3 b3;a4 b4;a5 b5;a6 b6;a7 b7;a8 b8;a9 b9。3.如权利要求1所述的一种魔方机器人颜色识别系统,其特征在于,所述魔方块设置为白色时,则在位置ax放置朝向为s极的磁钢,位置bx不安装磁钢。4.如权利要求1所述的一种魔方机器人颜色识别系统,其特征在于,所述魔方块设置为黄色时,则在位置ax放置朝向为n极的磁钢,位置bx不安装磁钢。5.如权利要求1所述的一种魔方机器人颜色识别系统,其特征在于,所述魔方块设置为红色时,则在位置ax不安装磁钢,位置bx放置朝向为s极的磁钢。6.如权利要求1所述的一种魔方机器人颜色识别系统,其特征在于,所述魔方块设置为橙色时,则在位置ax不安装磁钢,位置bx放置朝向为n极的磁钢。7.如权利要求1所述的一种魔方机器人颜色识别系统,其特征在于,所述魔方块设置为绿色时,则在位置ax放置朝向为n极的磁钢,位置bx放置朝向为n极的磁钢。8.如权利要求1所述的一种魔方机器人颜色识别系统,其特征在于,所述魔方块设置为蓝色时,则在位置ax不安装磁钢,位置bx不安装磁钢。9.如权利要求1所述的一种魔方机器人颜色识别系统,其特征在于,所述磁力传感器感应到不同魔方块的面具有的磁性后,判断所有魔方块对应的颜色,通过中央处理器对各个面的魔方块颜色进行记录。10.如权利要求9所述的一种魔方机器人颜色识别系统,其特征在于,所述中央处理器根据识别结果运算处理后,控制机器人机械手臂按照设定程序进行魔方的复原。
技术总结
本实用新型公开了一种魔方机器人颜色识别系统,所述系统包括:磁力传感器和磁钢,所述磁力传感器设置在魔方承载台内,每个魔方块的每个面中设置有不同磁性的磁钢,不同磁性的磁钢在魔方块中代表不同的魔方块颜色,通过磁力传感器检测当前魔方块中磁体的磁性,判断当前魔方块的颜色,利用机械手臂完成魔方拼复。本实用新型解决现有魔方颜色的识别易受环境因素影响、易出现误差的问题。易出现误差的问题。易出现误差的问题。
技术研发人员:李卫平 王永平
受保护的技术使用者:山东漾生智能科技有限公司
技术研发日:2020.11.16
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。