1.本技术涉及清洁机器人技术领域,尤其涉及一种清洁机器人及用于清洁机器人的清洁组件。
背景技术:
2.近年来,随着社会经济的发展以及家庭生活水平的提高,家具清洁逐步进入智能化、机器化的时代,应运而生的清洁机器人因其具有自动清洁等效果而正受到越来越多家庭的欢迎,清洁机器人能够将人们从家居清洁工作中解放出来,有效减轻人们在家居清洁方面的工作负担,缓解人们在进行家居清洁过程中的劳累程度。
3.清洁机器人是通过辊刷(亦称中扫)旋转刷扫和真空吸尘等技术将地面的垃圾清理入集尘盒中,如此,在清洁机器人的清扫过程中其辊刷的转轴上会缠绕大量的毛发,需要人工拆卸定期处理,如若清理不及时毛发的缠绕会导致辊刷旋转困难,清洁机器人的清扫效果明显变差。
4.因此,有必要提出一种用于清洁机器人的清洁组件,能够使得清洁机器人在清扫的过程中减少毛发缠绕于辊刷的转轴上以及方便地将缠绕于辊刷转轴上的毛发清除。
技术实现要素:
5.鉴于以上所述相关技术的缺点,本技术的目的在于提供一种清洁机器人及用于清洁机器人的清洁组件,以解决现有技术中存在的辊刷的转轴易缠绕毛发等杂物的问题。
6.为实现上述目的及其他相关目的,本技术第一方面公开一种用于清洁机器人的清洁组件,包括:辊刷,用于设置在清洁机器人底部的辊刷室内,包括轴芯以及装设于所述轴芯上的刷体;第一转轴组,连接于所述轴芯的第一端并卡设在所述辊刷室的主动端;第二转轴组,连接于所述轴芯的第二端并卡设在所述辊刷室的从动端;所述第二转轴组与所述第一转轴组在所述轴芯中被空间隔离。
7.在本技术第一方面的某些实施方式中,所述刷体包括毛刷体或/及胶刷体。
8.在本技术第一方面的某些实施方式中,所述轴芯包括位于所述轴芯第一端用于连接所述第一转轴组的第一轴接部、位于所述轴芯第二端用于连接所述第二转轴组的第二轴接部、以及用于隔离所述第一轴接部与第二轴接部的隔离部。
9.在本技术第一方面的某些实施方式中,所述隔离部为轴芯的实体结构、止挡结构、或孔径小于所述第一轴接部或第二轴接部的通孔结构。
10.在本技术第一方面的某些实施方式中,所述第一轴接部或/及第二轴接部具有沉孔。
11.在本技术第一方面的某些实施方式中,所述第一转轴组包括:第一转轴,其第一端连接于所述轴芯的第一轴接部,其第二端连接位于所述主动端的驱动系统;第一内盖,固定在所述第一转轴上,包括对应嵌入在所述沉孔内的嵌合结构;第一外盖,可转动地轴接在所述第一转轴上,并与所述第一内盖相互盖合;轴套件,固定在所述第一转轴的第二端,用于
连接所述驱动系统。
12.在本技术第一方面的某些实施方式中,所述嵌合结构的周侧形成有用于盖合在所述轴芯的第一端的内盖体。
13.在本技术第一方面的某些实施方式中,所述第一外盖与所述第一内盖之间具有一容设空间,所述容设空间内设置有一轴接在所述第一转轴上的轴承。
14.在本技术第一方面的某些实施方式中,所述第一外盖具有减震层。
15.在本技术第一方面的某些实施方式中,所述第一内盖对应所述第一外盖的一侧形成有环形隔离槽,所述第一外盖的盖沿位于所述环形隔离槽内。
16.在本技术第一方面的某些实施方式中,所述环形隔离槽内设有粘接件。
17.在本技术第一方面的某些实施方式中,所述第二转轴组包括:第二转轴,其第一端连接于所述轴芯的第二轴接部,其第二端用于卡合在所述卡设在所述辊刷室的从动端;第二内盖,固定在所述第二转轴上,包括对应嵌入在所述沉孔内的嵌合结构;第二外盖,可转动地轴接在所述第二转轴上,并与所述第二内盖相互盖合。
18.在本技术第一方面的某些实施方式中,所述第二转轴的第二端具有一颈部,所述第二外盖穿孔的内壁上具有用于滑动设置在所述第二转轴颈部的凸点以限制所述第二外盖在轴向的运动。
19.在本技术第一方面的某些实施方式中,所述嵌合结构的周侧形成有用于盖合在所述轴芯的第二端的内盖体。
20.在本技术第一方面的某些实施方式中,所述第二外盖与第二内盖之间具有一容设空间,所述容设空间内设置有一轴接在所述第二转轴上的轴承。
21.在本技术第一方面的某些实施方式中,所述第二外盖具有减震层。
22.在本技术第一方面的某些实施方式中,所述第二内盖对应所述第二外盖的一侧形成有环形隔离槽,所述第二外盖的盖沿位于所述环形隔离槽内。
23.在本技术第一方面的某些实施方式中,所述环形隔离槽内设有粘接件。
24.本技术的第二方面公开了一种清洁机器人,包括:机器人本体,包括壳体;动力系统,包括设置在所述机器人本体上相对两侧用于驱动所述机器人本体移动的驱动轮;控制系统,设置在所述壳体内用于控制所述驱动轮;清洁系统,设置在所述机器人本体上用于依据所述控制系统的控制指令执行清洁作业;集尘系统,设置在所述壳体内用于收集所述清洁系统在清洁作业中收集的灰尘;如本技术第一方面公开的清洁组件,设置在所述机器人本体底部的辊刷室内,用于在转动状态下执行清洁作业。
25.综上所述,本技术公开的清洁机器人及用于清洁机器人的清洁组件能有效的减少清洁机器人在清扫中毛发缠绕于辊刷的转轴上以及方便地将缠绕于辊刷转轴上的毛发清除,不仅免除或大大减少了人工清理辊刷,增强了用户体验感,而且提高了清洁机器人的清洁效率。
附图说明
26.图1显示为本技术用于清洁机器人的清洁组件在一实施例中分离于清洁机器人的结构示意图。
27.图2显示为本技术用于清洁机器人的清洁组件在一实施例中的结构示意图。
28.图3显示为本技术用于清洁机器人的清洁组件在一实施例中的又一结构示意图。
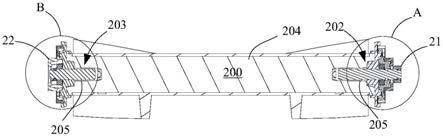
29.图4显示为本技术用于清洁机器人的清洁组件在一实施例中的截面结构示意图。
30.图5显示为本技术用于清洁机器人的清洁组件在一实施例中的分离结构示意图。
31.图6显示为本技术用于清洁机器人的清洁组件在一实施例中结合于清洁机器人的结构示意图。
32.图7显示为本技术用于清洁机器人的清洁组件在一实施例中的第一转轴组的拆分结构示意图。
33.图8显示为图4中a部分的局部放大图。
34.图9显示为本技术用于清洁机器人的清洁组件在一实施例中的第二转轴组的拆分结构示意图。
35.图10显示为图4中b部分的局部放大图。
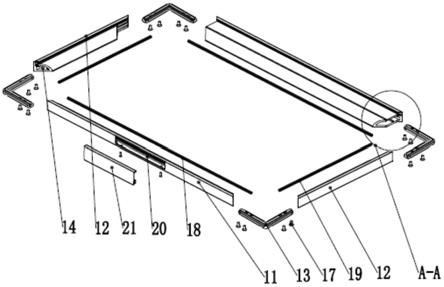
36.图11显示为本技术清洁机器人在一实施例中的结构示意图。
37.图12显示为本技术清洁机器人在一实施例中的仰视示意图。
具体实施方式
38.以下由特定的具体实施例说明本技术的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本技术的其他优点及功效。
39.在下述描述中,参考附图,附图描述了本技术的若干实施例。应当理解,还可使用其他实施例,并且可以在不背离本公开的精神和范围的情况下进行机械组成、结构、电气以及操作上的改变。下面的详细描述不应该被认为是限制性的,并且本技术的实施例的范围仅由公布的专利的权利要求书所限定。这里使用的术语仅是为了描述特定实施例,而并非旨在限制本技术。空间相关的术语,例如“上”、“下”、“左”、“右”、“下面”、“下方”、“下部”、“上方”、“上部”等,可在文中使用以便于说明图中所示的一个元件或特征与另一元件或特征的关系。
40.虽然在一些实例中术语第一、第二等在本文中用来描述各种元件或参数,但是这些元件或参数不应当被这些术语限制。这些术语仅用来将一个或参数件与另一个或参数进行区分。例如,第一端可以被称作第二端,并且类似地,第二端可以被称作第一端,而不脱离各种所描述的实施例的范围。第一端和第二端均是在描述一端,但是除非上下文以其他方式明确指出,否则它们不是同一端。相似的情况还包括第一转轴组与第二转轴组,或者第一轴接部与第二轴接部。
41.再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述的特征、步骤、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、步骤、操作、元件、组件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合。因此,“a、b或c”或者“a、b和/或c”意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、b和c”。仅当元件、功能、步骤或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
42.现有的清洁机器人的清扫过程中其辊刷的转轴上会缠绕大量的毛发,需要人工拆卸定期处理,如若清理不及时毛发的缠绕会导致辊刷旋转困难,清洁机器人的清扫效果明
显变差。
43.鉴于此,本技术公开一种用于清洁机器人的清洁组件,包括辊刷、第一转轴组和第二转轴组。
44.所述辊刷用于设置在清洁机器人底部的辊刷室内,包括轴芯和刷体,所述刷体装设于所述轴芯上。
45.所述第一转轴组连接于所述轴芯的第一端并卡设在所述辊刷室的主动端。
46.所述第二转轴组连接于所述轴芯的第二端并卡设在所述辊刷室的从动端,所述第二转轴组和所述第一转轴组在所述轴芯中被空间隔离。
47.在本技术中,所述卡设是指可免工具拆卸或安装地设置,即操作人员不借助额外的工具下,仅用手就可以将所述第一转轴组从轴芯的第一端拆下,当然,也可以仅用手就可以将所述第一转轴组安装在轴芯的第一端;同理,操作人员仅用手就可以将所述第二转轴组从轴芯的第二端拆下,当然,也可以仅用手就可以将所述第二转轴组安装在轴芯的第二端。
48.通过本技术公开的用于清洁机器人的清洁组件能有效的防止或减少清洁机器人在清扫中毛发缠绕于辊刷的转轴上,以下结合图1至图10对实施例中所述的用于清洁机器人的清洁组件进行详细阐述。
49.请参阅图1至图4,图1显示为本技术用于清洁机器人的清洁组件在一实施例中分离于清洁机器人的结构示意图;图2显示为本技术用于清洁机器人的清洁组件在一实施例中的结构示意图;图3显示为本技术用于清洁机器人的清洁组件在一实施例中的又一结构示意图;图4显示为本技术用于清洁机器人的清洁组件在一实施例中的截面结构示意图,如图所示,所述辊刷20设置在清洁机器人底部的辊刷室23内,所述辊刷20包括轴芯200以及装设于所述轴芯200上的刷体201。
50.于实际应用中,所述清洁机器人又称之为扫地机器人、智能机器人、移动机器人、自动扫地机、智能吸尘器等,是智能家用电器的一种,能完成清扫、吸尘、拖地或者吸尘与拖地兼备的清洁工作。具体地,清洁机器人可受人控制(操作人员手持遥控器)或按照一定的设定规则自行在房间内完成地面清洁工作。
51.在一实施例中,所述清洁机器人包括机器人本体,所述机器人本体包括壳体10,所述壳体10包括底盘100和外壳101,所述底盘100可以由诸如塑料的材料整体成型,其包括多个预先形成的槽、凹陷、卡位或类似结构,用于将相关装置或部件安装或集成在所述底盘上。在某些实施例中,所述外壳101也可以由诸如塑料的材料整体成型,并且被构造为与所述底盘100互补,能为安装到底盘100的相关装置或部件提供保护。所述底盘100和外壳101可以通过各种合适的装置(例如螺丝、卡扣等)可拆卸地组合在一起,并且在结合在一起之后,所述底盘100和外壳101可形成一具有一定容置空间的封装结构。
52.在一实施例中,所述底盘100底部中央区域具有容槽11和罩壳12,所述容槽11和罩壳12合围形成的一腔体即为所述辊刷室23,所述辊刷20设置在该辊刷室23内。
53.参阅图2和图3,如图所示,所述刷体201包括毛刷体2010或/及胶刷体2011。在一种实施方式中,所述刷体201包括毛刷体2010,所述毛刷体2010的生长方向与所述轴芯200的径向基本一致,清洁机器人清扫过程中采用毛刷体2010清扫垃圾;在另一种实施方式中,如图3所示,所述刷体201包括胶刷体2011,所述胶刷体2011的生长方向与所述轴芯200的径向
基本一致,清洁机器人清扫过程中采用胶刷体2011清扫垃圾;在又一种实施方式中,如图2所示,为了能够兼顾毛毯和地板等多种清洁环境以及吸尘效率,所述刷体201包括毛刷体2010和胶刷体2011,所述毛刷体2010和胶刷体2011交替间隔设置且生长方向与所述轴芯200的径向基本一致,由于毛刷体2010上的毛刷簇之间存在较大缝隙,使得风很容易从缝隙之间流失,对形成真空环境形成的帮助比较小。因此,通过设置胶刷体2011,可以形成兜风效果,并且当兜风强度达到预设强度时,即可协助实现对清洁对象的扫动,使得垃圾可以在辊刷20的扫动和风的吹动下更方便的被清理。
54.在一实施例中,所述胶刷体2011设置为v型或u型螺旋结构,且“v”字形的尖端位于辊刷20的中部位置且朝向清洁机器人行走方向,在辊刷20滚扫过程中,由v型或u型螺旋结构的相对两侧将垃圾从两侧的向中部位置聚集,使部分灰尘,尤其是大颗粒的垃圾更容易被清理,结构简单却大大提高了清扫效率。进一步地,为了缓解垃圾对辊刷20的冲击力,参见图2和图3,如图所示,在所述胶刷体2011上开设又若干缺口,所述缺口以胶刷体中心为首,间距逐渐增大地往两侧排列。当然,辊刷20中的胶刷体2011也可以呈其它螺旋排列方式,如“\”“/”向辊刷20中部交错分布,同样可以起到将垃圾朝辊刷20的中部位置聚集的效果
55.在一实施例中,所述毛刷体2010设置为v型或u型螺旋结构,且“v”字形的尖端位于辊刷20的中部位置且朝向清洁机器人行走方向,在辊刷20滚扫过程中,由v型或u型螺旋结构相对两侧的毛刷将垃圾从两侧的向中部位置聚集,使垃圾更容易被清理。当然,辊刷20中的毛刷体2010也可以呈其它螺旋排列方式,如“\”“/”向辊刷中部交错分布,同样可以起到将垃圾朝辊刷20的中部位置聚集的效果。
56.请参阅图4和图5,图5显示为本技术用于清洁机器人的清洁组件在一实施例中的分离结构示意图,如图所示,所述轴芯200包括位于所述轴芯200第一端用于连接所述第一转轴组21的第一轴接部202、位于所述轴芯200第二端用于连接所述第二转轴组22的第二轴接部203、以及用于隔离所述第一轴接部202与第二轴接部203的隔离部204。
57.在一实施例中,所述第一轴接部202或/及第二轴接部203具有沉孔205。在一种实施方式中,所述第一轴接部202具有沉孔205,该沉孔205用于将第一转轴组21连接在所述轴芯200的第一端,方便将第一转轴组21组装或拆卸于辊刷20;在另一种实施方式中,所述第二轴接部203具有沉孔205,该沉孔205用于将第二转轴组22连接在所述轴芯200的第二端,方便将第二转轴组22组装或拆卸于辊刷20;在其他的实施方式中,所述第一轴接部202和第二轴接部202均具有沉孔205,用于将第一转轴组21连接在所述辊刷20的第一端,第二转轴组22连接在所述轴芯200的第二端,方便将第一转轴组21和第二转轴组22组装或拆卸于所述辊刷20。
58.在一实施例中,所述沉孔205包括上孔位和下孔位,所述下孔位用于为所连接的第一转轴组21(或第二转轴组22)的伸入提供容纳空间,所述上孔位用于为所连接的第一转轴组21(或第二转轴组22)紧密嵌合在轴芯200上时提供嵌合空间。
59.为了避免第一转轴组21和第二转轴组22与所述轴芯200的径向发生相对运动,在一实施例中,在所述沉孔205的上孔位内壁上具有单个或间隔设置的多个凹槽2050。但并不以此为限,在其他实施例中,可例如将沉孔205的上孔位设置为三角形、方形、不规则多边形等非圆形结构以避免第一转轴组21和第二转轴组22与所述轴芯200的径向发生相对运动。
60.在一实施例中,如图4所示,所述隔离部204为轴芯200的实体结构,即,所述轴芯200内部由第一轴接部202至第二轴接部203之间为实心结构。但并不以此为限,所述隔离部204可例如为止挡结构,具体为设置在第一轴接部202和第二轴接部203末端的阻挡块。或者,所述隔离部204还可例如为孔径小于所述第一轴接部或第二轴接部的通孔结构。
61.请参阅图1和图6,图6显示为本技术用于清洁机器人的清洁组件在一实施例中结合于清洁机器人的结构示意图,如图所示,所述第一转轴组21连接于所述轴芯200的第一端并卡设在所述辊刷室23的主动端。在实施例中,所述第一转轴组21连接于所述轴芯200第一端的第一轴接部202,所述辊刷室23具有驱动所述辊刷20旋转的驱动系统(未予以图示)的一端为辊刷室23的主动端,位于辊刷室23主动端的相对的一端为所述辊刷室23的从动端。需要说明的是,所述驱动系统包括驱动电机,用来驱动所述辊刷20旋转以清扫地面。
62.请参阅图4、图7和图8,图7显示为本技术用于清洁机器人的清洁组件在一实施例中的第一转轴组的拆分结构示意图;图8显示为图4中a部分的局部放大图,如图所示,在实施例中,所述第一转轴组件21包括第一转轴210、第一内盖211、第一外盖212以及轴套件213。
63.所述第一转轴210的第一端连接于所述轴芯200的第一轴接部,其第二端连接位于所述主动端的驱动系统。在实施例中,所述第一转轴210的第二端固定有轴套件213,所述轴套件用于连接所述驱动系统,所述第一转轴210的第二端通过该轴件套213与位于所述主动端的驱动系统相连,驱动系统驱动轴套件213带动第一转轴210旋转。
64.在一实施例中,所述第一转轴210的第一端伸入所述第一轴接部202的沉孔205的下孔位,所述第一转轴210的第二端的相对两侧向下凹陷形成横截面为非圆形的凸台2100,所述轴套件213具有顺应所述凸台2100的套孔,所述轴套件213通过其套孔紧密的套设在凸台2100上,同时所述轴套件213连接于所述驱动系统的驱动电机的输出轴上并可被驱动带动所述第一转轴210旋转。如此,将所述轴套件213固定在所述第一转轴210的第二端,避免在旋转中轴件套213与第一转轴210的径向发生相对运动。但并不以此为限,所述第一转轴210的第二端也可设置为横截面三角形、方形、不规则多边形等非圆形结构,只需适应性的在所述轴件套213上开设顺应上述第二端结构的套孔即可,如此也可避免在旋转中轴件套213与第一转轴210的径向发生相对运动。
65.在一实施例中,在所述第一转轴210的第二端形成的凸台2100的侧壁上设有凹陷部2101,所述轴套件213的套孔的内壁上设置有配合于所述凹陷部2101的凸起部2130以限制所述轴件套213相对第一转轴210在轴向的运动,保证了轴件套213不可松动的与所述第一转轴210相连。
66.所述第一内盖211固定在所述第一转轴210上,包括对应嵌入在所述沉孔205内的嵌合结构2110,所述第一内盖211的嵌合结构2110用于将第一内盖211以及第一转轴210固定在轴芯200第一端的第一轴接部202。
67.在一实施例中,所述第一内盖211的嵌合结构2110设置在所述第一内盖211的朝向第一转轴210的第一端的一侧,在所述第一转轴210的第一端伸入所述第一轴接部202的沉孔205的下孔位时,所述嵌合结构2110嵌入所述第一轴接部202的沉孔205的上孔位以使得第一内盖211以及第一转轴210紧密的连接在轴芯200的第一轴接部202,从而在驱动系统驱动第一转轴210旋转时,所述轴芯200也随之旋转。具体地,为了避免第一内盖211和第一轴
接部202的径向发生相对运动,即避免第一转轴组21和轴芯200的径向发生相对运动,沉孔205的上孔位结构如上所述,所述第一内盖211的嵌合结构2110为顺应于沉孔205的上孔位的凸台,该凸台紧密的嵌入所述第一轴接部202的沉孔205的上孔位内。
68.为了避免或减少毛发缠绕于第一内盖211与所述轴芯200的第一端的结合处,在一实施例中,所述嵌合结构2110的周侧形成有用于盖合在所述轴芯200的第一端的内盖体2111。较佳地,所述内盖体2111的内缘刚好贴合于所述轴芯200的第一端的外缘。
69.所述第一外盖212可转动地轴接在所述第一转轴210上,并于所述第一内盖211相互盖合。
70.在一实施例中,所述第一外盖212包括盖本体、盖沿2120以及位于所述盖本体中心区域的穿孔2121,所述盖沿2120由盖本体的外沿向第一内盖211方向延伸形成,所述穿孔2121设置为向远离第一内盖211方向延伸的通孔结构,并且所述通孔结构中远离第一内盖211方向的孔径小于靠近第一内盖211方向的孔径使得第一转轴210可穿过穿孔且与穿孔之间的缝隙最小化以防止或减少毛发进入,所述第一转轴210贯穿第一外盖212的穿孔2121使得第一外盖212可转动地轴接在所述第一转轴210上,并于所述第一内盖211相互盖合。
71.于实际应用中,所述第一外盖212是可转动的轴接在第一转轴210上的,第一外盖212相对第一转轴210会在轴向移动,从而使得第一外盖212时而盖合于第一内盖211,时而远离第一内盖211,清洁机器人清扫中毛发很容易便进入第一外盖212和第一内盖211之间而缠绕于第一转轴210上。鉴于此,所述第一转轴210的第二端具有一颈部2102,所述第一外盖212的穿孔2121的内壁上具有用于滑动设置在所述第一转轴颈部2102的凸点2122,所述第一转轴210被驱动转动时,所述第一外盖212的穿孔2121内壁上的凸点2122在第一转轴颈部2102滑动,一方面限制了第一外壳212在轴向的移动而使得第一外壳212保持与第一内盖211的相互盖合状态,另一方面防止第一外盖212被带动旋转。在实施例中,所述凸点2122设置为半球状凸起,但并不以此为限,在其他实施例中,所述凸点2122也可例如为其他弧形状凸起。
72.在一实施例中,所述第一外盖212和第一内盖211之间具有一容设空间,所述容设空间内设置有一轴接在所述第一转轴210上的轴承24。在实施例中,所述第一外盖212的穿孔2121的周侧朝向第一内盖211方向形成有圆环形凸起,所述第一外盖212与第一内盖211相互盖合使得所述圆环形凸起与第一内盖211相配合而形成所述容设空间,所述轴承24设置于所述容设空间内并于所述第一转轴210相轴接以使得所述第一转轴210被驱动转动时所述第一外盖212不随第一转轴210转动,从而在清扫中毛发等缠绕物不易缠绕于第一外盖212上。
73.为了避免或减少毛发进入缠绕于内外盖之间的缝隙内,在实施例中,所述第一内盖211对应所述第一外盖212的一侧形成有环形隔离槽2112,所述第一外盖212的盖沿2120位于所述环形隔离槽2112内。如此,在驱动第一转轴210转动时,环形隔离槽将2112内外盖之间的缝隙遮挡住,减少了毛发的进入。
74.为了防止清洁机器人清扫过程中,毛发进入所述环形隔离槽2112内,于实际应用中,所述环形隔离槽2112内设有粘结件25,用来粘结可能进入所述环形隔离槽2112内的毛发。在一实施例中,所述粘结件25设置为匹配于所述环形隔离槽2112底部的环形毛毡。但并不以此为限,在其他实施例中,所述粘结件25也可例如为分散黏贴在环形隔离槽2112底部
的多个毛毡条,所述粘结件25还可例如为匹配于所述环形隔离槽2112底部的环形魔术贴等。
75.清洁机器人清扫中在房间里随处行走,不可避免的会碰撞到房间内的墙体、桌椅等障碍物,使得机身产生颠簸,另外辊刷20贴近地面进行清扫不可不避免的会上下抖动,鉴于此,所述第一外盖212具有减震层(未予以图示),用于缓冲辊刷20在清洁机器人在清扫中产生的震动,同时为第一外壳212提供一保护层,避免第一外壳212长期使用产生磨损。在实施例中,所述减震层为采用包胶工艺将例如橡胶等具有弹性性能的材料包裹在第一外壳212外侧(即远离第一内盖的一侧),但并不以此为限。
76.请参阅图9和图10,图9显示为本技术用于清洁机器人的清洁组件在一实施例中的第二转轴组的拆分结构示意图;图10显示为图4中b部分的局部放大图,如图所示,如图所示,在实施例中,所述第二转轴组件22包括第二转轴220、第二内盖221和第二外盖222。
77.所述第二转轴220的第一端连接于所述轴芯200的第二轴接部203,其第二端用于卡合在所述卡设在所述辊刷室23的从动端。在实施例中,所述第二转轴220的第一端伸入所述第二轴接部203的沉孔205的下孔位。
78.所述第二内盖221固定在所述第二转轴220上,包括对应嵌入在第二轴接部203的沉孔205内的嵌合结构2210,所述第二内盖221的嵌合结构2210用于将第二内盖221以及第二转轴220固定在轴芯200第二端的第二轴接部203。
79.在一实施例中,所述第二内盖221的嵌合结构2210设置在所述第二内盖221的朝向第二转轴220的第一端的一侧,在所述第二转轴220的第一端伸入所述第二轴接部203的沉孔的下孔位时,其嵌合结构2210嵌入所述第二轴接部203的沉孔205的上孔位以使得第二内盖221带动第二转轴220紧密的连接在轴芯200的第二轴接部203,从而在辊刷被驱动发生旋转时,所述第二转轴220也能顺应辊刷旋转。具体地,为了避免第二内盖221和第二轴接部220的径向发生相对运动,即避免第二转轴组件22和轴芯200的径向发生相对运动,沉孔205的上孔位结构如上所述,所述第二内盖221的嵌合结构2210为顺应于第二轴接部203的沉孔205的上孔位的凸台,该凸台紧密的嵌入所述第二轴接部203的沉孔205的上孔位内。
80.为了避免或减少毛发缠绕于第二内盖221与所述轴芯200的第二端的结合处,在一实施例中,所述第二内盖221的嵌合结构2210的周侧形成有用于盖合在所述轴芯200的第二端的内盖体2211。较佳地,所述内盖体2211的内缘刚好贴合于所述轴芯200的第二端的外缘。
81.所述第二外盖222可转动地轴接在所述第二转轴220上,并于所述第二内盖221相互盖合。
82.在一实施例中,所述第二外盖222包括盖本体、盖沿2220以及位于所述盖本体中心区域的穿孔2221,所述盖沿2220由盖本体的外沿向第二内盖221方向延伸形成,所述穿孔2221设置为向远离第二内盖221方向延伸的通孔结构,并且所述通孔结构中远离第二内盖221方向的孔径小于靠近第二内盖221方向的孔径使得第二转轴220可穿过穿孔且与穿孔之间的缝隙最小化以防止或减少毛发进入,所述第二转轴220贯穿第二外盖222的穿孔2221使得第二外盖222可转动地轴接在所述第二转轴220上,并于所述第二内盖221相互盖合。
83.于实际应用中,所述第二外盖222是可转动的轴接在第二转轴220上的,第二外盖222相对第二转轴220会在轴向移动,从而使得第二外盖222时而盖合于第二内盖221,时而
远离第二内盖221,清洁机器人清扫中毛发很容易便进入第二外盖222和第二内盖221之间而缠绕于第二转轴220上。鉴于此,所述第二转轴220的第二端具有一颈部2200,所述第二外盖222的穿孔2221的内壁上具有用于滑动设置在所述第二转轴颈部2200的凸点2222,在辊刷20被驱动转动时,所述第二外盖222的穿孔2221内壁上的凸点2222在第二转轴颈部2200滑动,一方面限制了第二外壳222在轴向的移动而使得第二外壳222保持与第二内盖221的相互盖合状态,另一方面防止第二外盖222被带动旋转。在实施例中,所述凸点2222设置为半球状凸起,但并不以此为限,在其他实施例中,所述凸点2222也可例如为其他弧形状凸起。
84.参阅图10,如图所示,所述第二外盖222和第二内盖221之间具有一容设空间,所述容设空间内设置有一轴接在所述第二转轴220上的轴承24。在实施例中,所述第二外盖222的穿孔2221的周侧朝向第二内盖221方向形成有圆环形凸起,所述第二外盖222与第二内盖221相互盖合使得所述圆环形凸起与第二内盖221相配合而形成所述容设空间,所述轴承24设置于所述容设空间内并于所述第二转轴220相轴接以使得所述第二转轴220被带动转动时所述第二外盖222不随第二转轴220转动,从而在清扫中毛发等缠绕物不易缠绕于第二外盖222上。
85.为了避免或减少毛发进入缠绕于内外盖之间的缝隙内,在实施例中,所述第二内盖221对应所述第二外盖222的一侧形成有环形隔离槽2212,所述第二外盖222的盖沿2220位于所述环形隔离槽2212内。如此,在驱动第二转轴220转动时,环形隔离槽2212将内外盖之间的缝隙遮挡住,减少了毛发的进入。
86.为了防止清洁机器人清扫过程中,毛发进入第二内盖221上的环形隔离槽2212内,于实际应用中,所述环形隔离槽2212内设有粘结件25,用来粘结可能进入所述环形隔离槽2212内的毛发。在一实施例中,所述粘结件25设置为匹配于所述环形隔离槽2212底部的环形毛毡。但并不以此为限,在其他实施例中,所述粘结件25也可例如为分散黏贴在环形隔离槽2212底部的多个毛毡条,所述粘结件25还可例如为匹配于所述环形隔离槽2212底部的环形魔术贴等。
87.清洁机器人清扫中在房间里随处行走,不可避免的会碰撞到房间内的墙体、桌椅等障碍物,使得机身产生颠簸,另外辊刷20贴近地面进行清扫不可不避免的会上下抖动,鉴于此,所述第二外盖222具有减震层(未予以图示),用于缓冲辊刷20在清洁机器人在清扫中产生的震动,同时为第二外壳222提供一保护层,避免第二外壳222长期使用产生磨损。在实施例中,所述减震层为采用包胶工艺将例如橡胶等具有弹性性能的材料包裹在第二外壳222外侧(即远离第二内盖221的一侧),但并不以此为限。
88.需要说明的是,在第一转轴组和第二转轴组拆离于辊刷后,为了防止重新组装时出现装反的情况,所述第一转轴组、第二转轴组以及第一轴接部和第二轴接部采用防呆设计。具体为,在第一轴接部和第二轴接部均具有沉孔的情况下,所述第一轴接部的沉孔的深度大于第二轴接部的沉孔的深度,所述第一转轴组的第一转轴的长度大于第二转轴组的第二转轴的长度且与第一轴接部的沉孔的深度相适应,所述第二转轴组的第二转轴的长度与第二轴接部的沉孔的深度相适应,如此,第一转轴组的第一转轴的长度要大于第二轴接部的沉孔的深度,第二转接部的沉孔不足以容纳第一转轴组的第一转轴,第一转轴组无法安装于第二轴接部。
89.通过本技术公开的用于清洁机器人的清洁组件,能够有效的防止清洁机器人在清扫中毛发缠绕于辊刷的转轴上,不仅免除了人工清理辊刷,增强用户体验感,而且提高了清洁机器人的清洁效率,另外本技术中的清洁组件结构简单,方便拆卸,也便于清理。
90.本技术还公开一种清洁机器人,包括机器人本体、动力系统、控制系统、清洁系统、集尘系统以及上述清洁组件,所述清洁组件设置在所述机器人本体底部的辊刷室内,用于在转动状态下执行清洁作业。
91.以下结合图1至图12,对实施例中所述的一种清洁机器人进行详细阐述。
92.为了方便理解和清楚地表述,在本技术实施例中,将所述动力系统驱动所述机器人本体前进的方向定义为前向(即图11中虚线箭头所示的方向);对应的,所述机器人本体前进的方向的反方向定义为后向。应理解的,所述机器人本体前进的方向的机器人本体的一侧定义为前侧或前端;远离所述前侧或前端的相反方向的机器人本体的一侧定义为后侧或后端。
93.请参阅图11和图12,图11显示为本技术清洁机器人在一实施例中的结构示意图;图12显示为本技术清洁机器人在一实施例中的仰视示意图,如图所示,所述清洁机器人本体包括壳体10,所述壳体10包括底盘100和外壳101,所述底盘100可以由诸如塑料的材料整体成型,其包括多个预先形成的槽、凹陷、卡位或类似结构,用于将所述动力系统、所述控制系统、所述清洁系统、所述集尘系统和所述清洁组件安装或集成在所述底盘100上。在某些实施例中,所述外壳101也可以由诸如塑料的材料整体成型,并且被构造为与所述底盘100互补,能为安装到底盘100的各系统提供保护。所述底盘100和外壳101可以通过各种合适的装置(例如螺丝、卡扣等)可拆卸地组合在一起,并且在结合在一起之后,所述底盘100和外壳101可形成一具有一定容纳/容置空间的封装结构。
94.本实施例清洁机器人中的机器人本体整体呈扁圆柱形结构:底盘100为圆形,外壳101的顶部面板为圆形,外壳101的侧部面板自圆形的顶部面板的周缘向下延伸形成外圆周侧壁,所述侧部面板也可开设有多个凹槽、开口等。当所述清洁机器人进行移动(所述移动包括前进、后退、转向、以及旋转中的至少一种组合)时,扁圆柱形结构的机器人本体具有更好的环境适应性,例如,在移动时会减少与周边物件(例如家具、墙壁等)发生碰撞的几率或者减少碰撞的强度以减轻对清洁机器人本身和周边物件的损伤,更有利于转向或旋转。但并不以此为限,在其他实施例中,机器人本体还可以采用例如为矩形体结构、三角柱结构、或半椭圆柱结构(也可称为d字型结构)等。
95.一般地,所述外壳101的顶面还设有顶盖102,顶盖102可通过转动结构转动连接于外壳101上。顶盖102可位于外壳101的后部,但并不以此为限,所述顶盖102也可位于所述外壳101的前部。在某些实施方式中,所述转动结构可具有一转动端和一连接端,其中,所述转动端转动连接于外壳101,所述连接端固定连接于顶盖。在实际应用中,通过拨动顶盖102中远离转动结构的远端促使顶盖102绕着所述转动结构相对外壳101翻转,实现顶盖102的开启、闭合等。
96.外壳101的顶面还设有按键区,所述按键区布设有一个或多个功能按键,例如:电源按键、充电按键、清洁模式选择按键等。在某些实施例中,所述这些按键还配置有状态显示灯,显示这些按键的状态,以提供更佳的人机用户体验。在具体实现上,所述状态显示灯可在显示颜色及显示方式上有不同的选择,例如,所述状态显示灯可根据不同的状态(例
如:正常、待机、故障等)而显示不同的灯光颜色,所述状态显示灯也可根据不同的功能(例如:电源、充电、清洁模式等)而显示不同的灯光颜色,所述状态显示灯也可根据不同的状态(例如:正常、待机、故障等)或不同的功能(例如:电源、充电、清洁模式等)而采用不同的显示方式(例如:常亮、呼吸灯方式、闪烁等)。
97.外壳101的顶面还可设有其他装置。例如,在某些实施例中,在外壳101的顶面可设有摄像装置,所述摄像装置的数量可以是一个或多个,至于摄像装置的结构及设置信息可容后详述。在某些实施例中,在外壳101的顶面可设有拾音器,用于采集来自清洁机器人在清洁操作过程中的环境声音或者来自使用者的语音指令。在某些实施例中,在外壳101的顶面可设有麦克风,用于播放语音信息。在某些实施例中,在外壳101的顶面可设有触控显示屏,实现良好的人机体验。
98.为保护清洁机器人,所述机器人本体上还配置有防撞组件,用于避免因清洁机器人与清洁环境中的周边物体碰撞而产生损毁。所述防撞组件可例如为保险杠,用于缓冲清洁机器人在移动过程中与周围物体产生的碰撞。所述保险杠大致呈圆弧片状,其可安装于机器人本体的侧部面板的前向部分处。所述保险杠与机器人本体之间可设有弹性结构,从而在两者之间形成有一可伸缩弹性空间。当清洁机器人碰撞到障碍物时,所述保险杠受力后朝向机器人本体收缩,吸收并消解碰撞到障碍物所产生的冲击力,从而保护机器人本体。在某些实施例中,所述保险杠可采用多层结构,或者,在保险杠外侧还可设有软胶条等。
99.在一实施例中,所述清洁机器人还包括供电装置,所述供电装置用于向其他用电系统(例如动力系统、控制系统、清洁系统等)供电。在实际的实施方式中,所述供电装置包括可充电电池(组),例如可采用常规的镍氢(nimh)电池,经济可靠,或者,所述供电装置也可采用其他合适的可充电电池(组),例如锂电池,相比于镍氢电池,锂电池的体积比能量比镍氢电池更高,且,锂电池无记忆效应,可随用随充,便利性大大提高。所述可充电电池(组)安装在底盘的电池凹槽中,该电池凹槽的大小可以根据所安装的电池(组)来定制。所述可充电电池(组)可以通过常规的方式安装在所述电池凹槽中,例如弹簧闩。所述电池凹槽可被电池盖板封闭,所述电池盖板可以通过常规方式固定到所述底盘,例如螺丝。所述可充电电池(组)可连接有充电控制电路、电池充电温度检测电路以及电池欠压监测电路,充电控制电路、电池充电温度检测电路、以及电池欠压监测电路再与所述控制系统相连。清洁机器人通过设置在机器人本体侧部或者底部的充电电极与充电座连接进行充电。另外,在必要的情形下,所述供电装置中可包括主用电池和备用电池,当主用电池电量过低或出线故障时,就可转由备用电池工作。
100.请参阅图12,如图所示,所述动力系统包括设置在所述机器人本体上相对两侧用于驱动所述机器人本体移动的驱动轮13。所述驱动轮13沿着底盘100的任一侧安装,通常所述驱动轮13设置位于所述清洁系统的后端,用于驱动所述清洁机器人按照规划的移动轨迹进行前后往复运动、旋转运动或曲线运动等,或者驱动所述清洁机器人进行姿态的调整,并且提供所述本体与地板表面的两个接触点。所述驱动轮13可具有偏置下落式悬挂系统,以可移动方式紧固,例如以可旋转方式安装到所述机器人本体上,且接收向下及远离所述机器人本体偏置的弹簧偏置。所述弹簧偏置允许驱动轮以一定的着地力维持与地面的接触及牵引,以确保所述驱动轮13的轮胎面与地面充分地接触。在本技术中,在清洁机器人需要转弯或曲线行走时,通过调整器驱动所述机器人本体移动的两侧的驱动轮13的转速差来实现
转向。
101.在某些实施例中,所述机器人本体上还可以设置至少一个从动轮14(在某些实施例中,所述从动轮也被称为:辅轮、脚轮、滚轮、万向轮等)以稳定地支撑本体。例如,在所述机器人本体上设置一个从动轮14且位于所述驱动轮13的前部分,所述从动轮14与所述驱动轮13一并保持所述机器人本体在运动状态的平衡。
102.为了驱动所述驱动轮13和从动轮14的运转,所述动力系统还包括驱动电机和控制所述驱动电机的控制电路,控制所述驱动电机的驱动电路与所述控制系统电性连接,利用所述驱动电机可驱动所述驱动轮13实现移动。在具体实现上,所述驱动电机可例如为可逆驱动电机。
103.所述清洁系统设置在所述机器人本体上用于依据所述控制系统的控制指令执行清洁作业。在实施例中,所述清洁系统包括清洁组件和边扫组件15。在某些实施例中,参见1和图6,如图所示,所述底盘100底部中央区域具有容槽11和罩壳12,其中,所述容槽11和所述罩壳12经合体可形成一腔体,所述腔体为辊刷室23,所述清洁组件设置于所述辊刷室232内,且在罩壳12的下部设有毛刷清扫腔口(也可称为吸尘口),所述清洁组件凸出毛刷清扫腔口与需清扫地面接触。在实施例中,所述清洁组件包括辊刷20、第一转轴组21和第二转轴组22。
104.参见图1至图4,如图所示,所述辊刷20设置在清洁机器人底部的辊刷室23内,所述辊刷20包括轴芯200以及装设于所述轴芯200上的刷体201。
105.所述刷体201包括毛刷体2010或/及胶刷体2011。在一种实施方式中,所述刷体201包括毛刷体2010,所述毛刷体2010的生长方向与所述轴芯200的径向基本一致,清洁机器人清扫过程中采用毛刷体2010清扫垃圾;在另一种实施方式中,如图3所示,所述刷体201包括胶刷体2011,所述胶刷体2011的生长方向与所述轴芯200的径向基本一致,清洁机器人清扫过程中采用胶刷体2011清扫垃圾;在又一种实施方式中,如图2所示,为了能够兼顾毛毯和地板等多种清洁环境以及吸尘效率,所述刷体201包括毛刷体2010和胶刷体2011,所述毛刷体2010和胶刷体2011交替间隔设置且生长方向与所述轴芯200的径向基本一致,由于毛刷体2010上的毛刷簇之间存在较大缝隙,使得风很容易从缝隙之间流失,对形成真空环境形成的帮助比较小。因此,通过设置胶刷体2011,可以形成兜风效果,并且当兜风强度达到预设强度时,即可协助实现对清洁对象的扫动,使得垃圾可以在辊刷20的扫动和风的吹动下更方便的被清理。
106.在一实施例中,所述胶刷体2011设置为v型或u型螺旋结构,且“v”字形的尖端位于辊刷20的中部位置且朝向清洁机器人行走的方向,在辊刷20滚扫过程中,由v型或u型螺旋结构的相对两侧将垃圾从两侧的向中部位置聚集,使部分灰尘,尤其是大颗粒的垃圾更容易被清理,结构简单却大大提高了清扫效率。进一步地,为了缓解垃圾对辊刷20的冲击力,参见图2和图3,如图所示,在所述胶刷体2011上开设又若干缺口,所述缺口以胶刷体中心为首,间距逐渐增大地往两侧排列。当然,辊刷20中的胶刷体2011也可以呈其它螺旋排列方式,如“\”“/”向辊刷20中部交错分布,同样可以起到将垃圾朝辊刷20的中部位置聚集的效果
107.在一实施例中,所述毛刷体2010设置为v型或u型螺旋结构,且“v”字形的尖端位于辊刷20的中部位置且朝向清洁机器人行走的方向,在辊刷20滚扫过程中,由v型或u型螺旋
结构相对两侧的毛刷将垃圾从两侧的向中部位置聚集,使垃圾更容易被清理。当然,辊刷20中的毛刷体2010也可以呈其它螺旋排列方式,如“\”“/”向辊刷中部交错分布,同样可以起到将垃圾朝辊刷20的中部位置聚集的效果。
108.请参阅图4和图5,如图所示,所述轴芯200包括位于所述轴芯200第一端用于连接所述第一转轴组21的第一轴接部202、位于所述轴芯200第二端用于连接所述第二转轴组22的第二轴接部203、以及用于隔离所述第一轴接部202与第二轴接部203的隔离部204。
109.在一实施例中,所述第一轴接部202或/及第二轴接部203具有沉孔205。在一种实施方式中,所述第一轴接部202具有沉孔205,该沉孔205用于将第一转轴组21连接在所述轴芯200的第一端,方便将第一转轴组21组装或拆卸于辊刷20;在另一种实施方式中,所述第二轴接部203具有沉孔205,该沉孔205用于将第二转轴组22连接在所述轴芯200的第二端,方便将第二转轴组22组装或拆卸于辊刷20;在其他的实施方式中,所述第一轴接部202和第二轴接部202均具有沉孔205,用于将第一转轴组21连接在所述轴芯200的第一端,第二转轴组22连接在所述轴芯200的第二端,方便将第一转轴组21和第二转轴组22组装或拆卸于所述辊刷20。
110.在一实施例中,所述沉孔205包括上孔位和下孔位,所述下孔位用于为所连接的第一转轴组21(或第二转轴组22)的伸入提供容纳空间,所述上孔位用于为所连接的第一转轴组21(或第二转轴组22)紧密嵌合在轴芯200上时提供嵌合空间。
111.为了避免第一转轴组21和第二转轴组22与所述轴芯200的径向之间发生相对运动,在一实施例中,在所述沉孔205的上孔位内壁上具有单个或间隔设置的多个凹槽2050。但并不以此为限,在其他实施例中,可例如将沉孔205的上孔位设置为三角形、方形、不规则多边形等非圆形结构以避免第一转轴组21和第二转轴组22与所述轴芯200的径向发生相对运动。
112.在一实施例中,如图4所示,所述隔离部204为轴芯200的实体结构,即,所述轴芯200内部由第一轴接部202至第二轴接部203之间为实心结构。但并不以此为限,所述隔离部204可例如为止挡结构,具体为设置在第一轴接部202和第二轴接部203末端的阻挡块。或者,所述隔离部204还可例如为孔径小于所述第一轴接部或第二轴接部的通孔结构。
113.请参阅图1和图6,如图所示,所述第一转轴组21连接于所述轴芯200的第一端并卡设在所述辊刷室23的主动端。在实施例中,所述第一转轴组21连接于所述轴芯200第一端的第一轴接部202,所述辊刷室23具有驱动所述辊刷20旋转的驱动系统(未予以图示)的一端为辊刷室23的主动端,位于辊刷室23主动端的相对的一端为所述辊刷室23的从动端。需要说明的是,所述驱动系统包括驱动电机,用来驱动所述辊刷20旋转以清扫地面。
114.请参阅图4、图7和图8,如图所示,在实施例中,所述第一转轴组件21包括第一转轴210、第一内盖211、第一外盖212以及轴套件213。
115.所述第一转轴210的第一端连接于所述轴芯200的第一轴接部,其第二端连接位于所述主动端的驱动系统。在实施例中,所述第一转轴210的第二端固定有轴套件213,所述轴套件用于连接所述驱动系统,所述第一转轴210的第二端通过该轴件套213与位于所述主动端的驱动系统相连,驱动系统驱动轴套件213带动第一转轴210旋转。
116.在一实施例中,所述第一转轴210的第一端伸入所述第一轴接部202的沉孔205的下孔位,所述第一转轴210的第二端的相对两侧向下凹陷形成横截面为非圆形的凸台2100,
所述轴套件213具有顺应所述凸台2100的套孔,所述轴套件213通过其套孔紧密的套设在凸台2100上,同时所述轴套件213连接于所述驱动系统的驱动电机的输出轴上并可被驱动带动所述第一转轴210旋转。如此,将所述轴套件213固定在所述第一转轴210的第二端,避免在旋转中轴件套213与第一转轴210的径向发生相对运动。但并不以此为限,所述第一转轴210的第二端也可设置为横截面三角形、方形、不规则多边形等非圆形结构,只需适应性的在所述轴件套213上开设顺应上述第二端结构的套孔即可,如此也可避免在旋转中轴件套213与第一转轴210的径向发生相对运动。
117.在一实施例中,在所述第一转轴210的第二端形成的凸台2100的侧壁上设有凹陷部2101,所述轴套件213的套孔的内壁上设置有配合于所述凹陷部2101的凸起部2130以限制所述轴件套213相对第一转轴210在轴向的运动,保证了轴件套213不可松动的与所述第一转轴210相连。
118.所述第一内盖211固定在所述第一转轴210上,包括对应嵌入在所述沉孔205内的嵌合结构2110,所述第一内盖211的嵌合结构2110用于将第一内盖211以及第一转轴210固定在轴芯200第一端的第一轴接部202。
119.在一实施例中,所述第一内盖211的嵌合结构2110设置在所述第一内盖211的朝向第一转轴210的第一端的一侧,在所述第一转轴210的第一端伸入所述第一轴接部202的沉孔205的下孔位时,所述嵌合结构2110嵌入所述第一轴接部202的沉孔205的上孔位以使得第一内盖211以及第一转轴210紧密的连接在轴芯200的第一轴接部202,从而在驱动系统驱动第一转轴210旋转时,所述轴芯200也随之旋转。具体地,为了避免第一内盖211和第一轴接部202的径向发生相对运动,即避免第一转轴组21和轴芯200的径向发生相对运动,沉孔205的上孔位结构如上所述,所述第一内盖211的嵌合结构2110为顺应于沉孔205的上孔位的凸台,该凸台紧密的嵌入所述第一轴接部202的沉孔205的上孔位内。
120.为了避免或减少毛发缠绕于第一内盖211与所述轴芯200的第一端的结合处,在一实施例中,所述嵌合结构2110的周侧形成有用于盖合在所述轴芯200的第一端的内盖体2111。较佳地,所述内盖体2111的内缘刚好贴合于所述轴芯200的第一端的外缘。
121.所述第一外盖212可转动地轴接在所述第一转轴210上,并于所述第一内盖211相互盖合。
122.在一实施例中,所述第一外盖212包括盖本体、盖沿2120以及位于所述盖本体中心区域的穿孔2121,所述盖沿2120由盖本体的外沿向第一内盖211方向延伸形成,所述穿孔2121设置为向远离第一内盖211方向延伸的通孔结构,并且所述通孔结构中远离第一内盖211方向的孔径小于靠近第一内盖211方向的孔径使得第一转轴210可穿过穿孔且与穿孔之间的缝隙最小化以防止或减少毛发进入,所述第一转轴210贯穿第一外盖212的穿孔2121使得第一外盖212可转动地轴接在所述第一转轴210上,并于所述第一内盖211相互盖合。
123.于实际应用中,所述第一外盖212是可转动的轴接在第一转轴210上的,第一外盖212相对第一转轴210会在轴向移动,从而使得第一外盖212时而盖合于第一内盖211,时而远离第一内盖211,清洁机器人清扫中毛发很容易便进入第一外盖212和第一内盖211之间而缠绕于第一转轴210上。鉴于此,所述第一转轴210的第二端具有一颈部2102,所述第一外盖212的穿孔2121的内壁上具有用于滑动设置在所述第一转轴颈部2102的凸点2122,所述第一转轴210被驱动转动时,所述第一外盖212的穿孔2121内壁上的凸点2122在第一转轴颈
部2102滑动,一方面限制了第一外壳212在轴向的移动而使得第一外壳212保持与第一内盖211的相互盖合状态,另一方面防止第一外盖212被带动旋转。在实施例中,所述凸点2122设置为半球状凸起,但并不以此为限,在其他实施例中,所述凸点2122也可例如为其他弧形状凸起。
124.在一实施例中,所述第一外盖212和第一内盖211之间具有一容设空间,所述容设空间内设置有一轴接在所述第一转轴210上的轴承24。在实施例中,所述第一外盖212的穿孔2121的周侧朝向第一内盖211方向形成有圆环形凸起,所述第一外盖212与第一内盖211相互盖合使得所述圆环形凸起与第一内盖211相配合而形成所述容设空间,所述轴承24设置于所述容设空间内并于所述第一转轴210相轴接以使得所述第一转轴210被驱动转动时所述第一外盖212不随第一转轴210转动,从而在清扫中毛发等缠绕物不易缠绕于第一外盖212上。
125.为了避免毛发进入缠绕于内外盖之间的缝隙内,在实施例中,所述第一内盖211对应所述第一外盖212的一侧形成有环形隔离槽2112,所述第一外盖212的盖沿2120位于所述环形隔离槽2112内。如此,在驱动第一转轴210转动时,环形隔离槽将2112内外盖之间的缝隙遮挡住,减少了毛发的进入。
126.为了防止清洁机器人清扫过程中,毛发进入所述环形隔离槽2112内,于实际应用中,所述环形隔离槽2112内设有粘结件25,用来粘结可能进入所述环形隔离槽2112内的毛发。在一实施例中,所述粘结件25设置为匹配于所述环形隔离槽2112底部的环形毛毡。但并不以此为限,在其他实施例中,所述粘结件25也可例如为分散黏贴在环形隔离槽2112底部的多个毛毡条,所述粘结件25还可例如为匹配于所述环形隔离槽2112底部的环形魔术贴等。
127.清洁机器人清扫中在房间里随处行走,不可避免的会碰撞到房间内的墙体、桌椅等障碍物,使得机身产生颠簸,另外辊刷20贴近地面进行清扫不可不避免的会上下抖动,鉴于此,所述第一外盖212具有减震层(未予以图示),用于缓冲辊刷20在清洁机器人在清扫中产生的震动,同时为第一外壳212提供一保护层,避免第一外壳212长期使用产生磨损。在实施例中,所述减震层为采用包胶工艺将例如橡胶等具有弹性性能的材料包裹在第一外壳212外侧(即远离第一内盖的一侧),但并不以此为限。
128.请参阅图9和图10,如图所示,如图所示,在实施例中,所述第二转轴组件22包括第二转轴220、第二内盖221和第二外盖222。
129.所述第二转轴220的第一端连接于所述轴芯200的第二轴接部203,其第二端用于卡合在所述卡设在所述辊刷室23的从动端。在实施例中,所述第二转轴220的第一端伸入所述第二轴接部203的沉孔205的下孔位。
130.所述第二内盖221固定在所述第二转轴220上,包括对应嵌入在第二轴接部203的沉孔205内的嵌合结构2210,所述第二内盖221的嵌合结构2210用于将第二内盖221以及第二转轴220固定在轴芯200第二端的第二轴接部203。
131.在一实施例中,所述第二内盖221的嵌合结构2210设置在所述第二内盖221的朝向第二转轴220的第一端的一侧,在所述第二转轴220的第一端伸入所述第二轴接部203的沉孔的下孔位时,其嵌合结构2210嵌入所述第二轴接部203的沉孔205的上孔位以使得第二内盖221带动第二转轴220紧密的连接在轴芯200的第二轴接部203,从而在辊刷被驱动发生旋
转时,所述第二转轴220也能顺应辊刷旋转。具体地,为了避免第二内盖221和第二轴接部220的径向发生相对运动,即避免第二转轴组件22和轴芯200的径向发生相对运动,沉孔205的上孔位结构如上所述,所述第二内盖221的嵌合结构2210为顺应于第二轴接部203的沉孔205的上孔位的凸台,该凸台紧密的嵌入所述第二轴接部203的沉孔205的上孔位内。
132.为了避免或减少毛发缠绕于第二内盖221与所述轴芯200的第二端的结合处,在一实施例中,所述第二内盖221的嵌合结构2210的周侧形成有用于盖合在所述轴芯200的第二端的内盖体2211。较佳地,所述内盖体2211的内缘刚好贴合于所述轴芯200的第二端的外缘。
133.所述第二外盖222可转动地轴接在所述第二转轴220上,并于所述第二内盖221相互盖合。
134.在一实施例中,所述第二外盖222包括盖本体、盖沿2220以及位于所述盖本体中心区域的穿孔2221,所述盖沿2220由盖本体的外沿向第二内盖221方向延伸形成,所述穿孔2221设置为向远离第二内盖221方向延伸的通孔结构,并且所述通孔结构中远离第二内盖221方向的孔径小于靠近第二内盖221方向的孔径使得第二转轴220可穿过穿孔且与穿孔之间的缝隙最小化以防止或减少毛发进入,所述第二转轴220贯穿第二外盖222的穿孔2221使得第二外盖222可转动地轴接在所述第二转轴220上,并于所述第二内盖221相互盖合。
135.于实际应用中,所述第二外盖222是可转动的轴接在第二转轴220上的,第二外盖222相对第二转轴220会在轴向移动,从而使得第二外盖222时而盖合于第二内盖221,时而远离第二内盖221,清洁机器人清扫中毛发很容易便进入第二外盖222和第二内盖221之间而缠绕于第二转轴220上。鉴于此,所述第二转轴220的第二端具有一颈部2200,所述第二外盖222的穿孔2221的内壁上具有用于滑动设置在所述第二转轴颈部2200的凸点2222,在辊刷20被驱动转动时,所述第二外盖222的穿孔2221内壁上的凸点2222在第二转轴颈部2200滑动,一方面限制了第二外壳222在轴向的移动而使得第二外壳222保持与第二内盖221的相互盖合状态,另一方面防止第二外盖222被带动旋转。在实施例中,所述凸点2222设置为半球状凸起,但并不以此为限,在其他实施例中,所述凸点2222也可例如为其他弧形状凸起。
136.参阅图10,如图所示,所述第二外盖222和第二内盖221之间具有一容设空间,所述容设空间内设置有一轴接在所述第二转轴220上的轴承24。在实施例中,所述第二外盖222的穿孔2221的周侧朝向第二内盖221方向形成有圆环形凸起,所述第二外盖222与第二内盖221相互盖合使得所述圆环形凸起与第二内盖221相配合而形成所述容设空间,所述轴承24设置于所述容设空间内并于所述第二转轴220相轴接以使得所述第二转轴220被带动转动时所述第二外盖222不随第二转轴220转动,从而在清扫中毛发等缠绕物不易缠绕于第二外盖222上。
137.为了避免或减少毛发进入缠绕于内外盖之间的缝隙内,在实施例中,所述第二内盖221对应所述第二外盖222的一侧形成有环形隔离槽2212,所述第二外盖222的盖沿2220位于所述环形隔离槽2212内。如此,在驱动第二转轴220转动时,环形隔离槽2212将内外盖之间的缝隙遮挡住,减少毛发的进入。
138.为了防止清洁机器人清扫过程中,毛发进入第二内盖221上的环形隔离槽2212内,于实际应用中,所述环形隔离槽2212内设有粘结件25,用来粘结可能进入所述环形隔离槽
2212内的毛发。在一实施例中,所述粘结件25设置为匹配于所述环形隔离槽2212底部的环形毛毡。但并不以此为限,在其他实施例中,所述粘结件25也可例如为分散黏贴在环形隔离槽2212底部的多个毛毡条,所述粘结件25还可例如为匹配于所述环形隔离槽2212底部的环形魔术贴等。
139.清洁机器人清扫中在房间里随处行走,不可避免的会碰撞到房间内的墙体、桌椅等障碍物,使得机身产生颠簸,另外辊刷20贴近地面进行清扫不可不避免的会上下抖动,鉴于此,所述第二外盖222具有减震层(未予以图示),用于缓冲辊刷20在清洁机器人在清扫中产生的震动,同时为第二外壳222提供一保护层,避免第二外壳222长期使用产生磨损。在实施例中,所述减震层为采用包胶工艺将例如橡胶等具有弹性性能的材料包裹在第二外壳222外侧(即远离第二内盖221的一侧),但并不以此为限。
140.需要说明的是,在第一转轴组和第二转轴组拆离于辊刷后,为了防止重新组装时出现装反的情况,所述第一转轴组、第二转轴组以及第一轴接部和第二轴接部采用防呆设计。具体为,在第一轴接部和第二轴接部均具有沉孔的情况下,所述第一轴接部的沉孔的深度大于第二轴接部的沉孔的深度,所述第一转轴组的第一转轴的长度大于第二转轴组的第二转轴的长度且与第一轴接部的沉孔的深度相适应,所述第二转轴组的第二转轴的长度与第二轴接部的沉孔的深度相适应,如此,第一转轴组的第一转轴的长度要大于第二轴接部的沉孔的深度,第二转接部的沉孔不足以容纳第一转轴组的第一转轴,第一转轴组无法安装于第二轴接部。
141.所述容槽11可例如浮动系统支架或固定框架,所述罩壳12可例如辊刷盖或固定框架。
142.以浮动系统支架为例,浮动系统支架更可包括固定支架和浮动支架。所述浮动支架的一侧可通过轴转结构轴接于所述固定支架,从而可使得所述浮动支架的另一侧相对所述固定支架实现上下浮动。另外,在浮动系统支架中,所述浮动支架的后端开设有进尘开口,所述固定支架的后端开设有对应的进尘开口,且所述浮动支架的进尘开口与所述固定支架的进尘开口之间通过可伸缩的柔性进风通道连通。所述柔性进风通道可在所述浮动支架相对所述固定支架相对上下浮动时实现伸缩运动,具体地,当所述浮动支架相对所述固定支架远离时,所述浮动支架和所述固定支架之间的柔性进风通道伸展,当所述浮动支架相对所述固定支架靠近时,所述浮动支架和所述固定支架之间的柔性进风通道收缩。当清洁机器人处于正常的清洁过程时,所述浮动系统支架中的浮动支架在重力作用下浮动至最低位置,无论在地板、地毯或者其他不光滑清洁表面上,安装在所述浮动系统支架内的清洁组件都可以紧贴于被清洁地面,以实现最高效率的贴地清扫,同时,针对不同类型清洁地面上都具有较好的贴地效果,这样,对风道的密封性贡献明显。另外,当清洁地面高低起伏或清洁地面上存在障碍物时,通过所述浮动支架的上下浮动,可以降低清洁组件等与障碍物之间的相互作用,从而协助清洁机器人完成越障操作,也能保护清洁组件等,延长其使用寿命。
143.值得注意的是,一般地,清洁组件中的辊刷20,其宽度越宽则清洁覆盖范围越大,单次清洁宽度越宽,而集尘盒作为垃圾收纳部件,其与驱动轮等部件共同设置在壳体内,宽度受限,而且为了增加真空净压以将垃圾抽吸到集尘盒内,集尘盒的进尘口也不能很宽,因此,浮动支架中对应清洁组件的毛刷清扫腔口至浮动支架的进尘开口之间的截面是减缩。
144.所述辊刷盖可拆卸地盖合于浮动系统支架或固定框架的底部。当所述辊刷盖盖合于浮动系统支架或固定框架时,两者之间形成一可容纳清洁组件的辊刷室并将清洁组件的辊刷限定于所述辊刷室内。所述辊刷盖设有与辊刷对应以能显露出辊刷中的毛刷体及胶刷体的开口。在某些实施例中,在所述辊刷盖的开口的后边缘上设有刮条(即,所述刮条沿清洁机器人上是位于辊刷的后方),所述刮条与辊刷之间保持一定间距(例如1毫米至3毫米),并通过贴合于清扫地面,使其可以将一小部分未被辊刷直接卷起的垃圾拦截并撮起,从而使其在辊刷的扫动和风机的抽吸下被卷入。所述刮条的位置和角度的选择使得垃圾始终位于最佳的清扫和抽吸位置,避免在胶条之后还有遗留。在实际应用中,所述刮条可采用软胶材料制作,并可拆卸式地安装在所述辊刷盖上。
145.所述边扫组件15设于底盘100底部的边缘,在某些实施例中,所述边扫组件15可包括清洁边刷和用于控制所述清洁边刷的边刷电机。在图12所示的实施例中,清洁边刷的数量可为至少一个,设置于机器人本体前部的相对边侧(若所述清洁边刷的数量可为至少两个,则这至少两个清洁边刷分别对称设置于机器人本体前端的相对两侧),清洁边刷可采用旋转式清洁边刷,可在所述边刷电机的控制下作旋转。在某些实施例中,旋转式清洁边刷中的旋转轴相对于地面(所述地面可以设定为与机器人主体的底盘地面平行)成一定角度,例如,所述设置角度可确保清洁边刷处于外侧的刷毛要低于处于内侧的刷毛,使得外侧的刷毛更贴近地面,更有利于将垃圾碎屑等清扫到滚刷区域中。
146.所述集尘系统设置在所述壳体内,用于收集所述清洁系统在清洁作业中收集的灰尘。在实施例中,所述集尘系统包括集尘盒、吸尘风机以及相应的风道结构。
147.在一实施例中,所述集尘盒可安装在底盘的容纳空间中,该容纳空间开设于底盘的中央区域,该容纳空间的大小可以根据所安装的集尘盒来定制。集尘盒可以通过常规的方式安装在所述容纳空间中,例如弹簧闩或者直接放置。在某些实施例中,集尘盒设有把手或握手结构(例如凹槽、凸块等),以便于握持。所述把手可采用抽拉式把手或翻转式把手。
148.集尘盒可至少包括集尘腔以及与所述集尘腔连通的进尘口和出风口,在集尘盒的出风口处还设有滤芯或类似的过滤网结构,所述滤芯或类似的过滤网结构为可拆卸式设计,并可重复利用,例如,通过毛刷清理或水洗。集尘盒的进尘口处设有密封条或密封圈,所述集尘箱的进尘口与所述浮动系统支架中固定支架的进尘开口对应,这样,集尘盒的进尘口就通过所述固定支架和所述浮动支架之间的进风通道与所述浮动支架连通。集尘盒的出风口设有密封条或密封圈。
149.另外,集尘盒为可开合设计,在某些实施例中,集尘盒可分为盒本体和盒盖,所述盒本体具有集尘腔,且,所述出风口及所述出风口处的滤芯或类似的过滤网结构设于所述盒本体上,所述盒盖上则开设有进尘口,所述盒盖可以例如转轴等方式轴接于所述盒本体,并可通过例如卡扣等方式盖合于所述盒本体上。
150.所述吸尘风机具有进风口和出风口,吸尘风机的进风口通过连接通道与集尘盒的出风口的连通,吸尘风机的出风口与一排风通道连通。因此,本技术所述的风道结构可至少包括所述浮动支架的进尘开口与所述固定支架的进尘开口之间柔性进风通道、集尘盒和吸尘风机之间的连接通道、以及与吸尘风机的出风口连通的排风通道。排风通道可通过安装结构固定于底盘100上,在某些实施例中,所述安装结构可例如为螺丝锁附等。
151.在实际应用中,由吸尘风机中的风机马达驱动风扇旋转以使得掺杂有垃圾的气流
localization and mapping,视觉同时定位与地图创建)和物体识别。例如,在一实现方式中,所述机器人本体的顶部表面可设有单目摄像头,所述单目摄像头可以通过临近图像匹配计算出摄像头位姿的变换,在两个视角上进行三角测距又可以得出对应点的深度信息,通过迭代过程可以实现定位及建图。在一实现方式中,所述机器人本体的顶部表面可设有双目摄像头,所述单目摄像头可以通过三角方法计算出深度信息,通过迭代过程可以实现定位及建图。在一实现方式中,所述机器人本体的顶部表面可设有鱼眼摄像头,所述鱼眼摄像头凸出于机器人本体的顶部表面,通过所述鱼眼摄像头可获得全景图像。
156.在某些实施例中,所述至少一摄像装置可设置在机器人本体的侧部表面。例如,在一实现方式中,所述至少一摄像装置可设于机器人本体的前方的侧部表面上。
157.在某些实施例中,所述至少一摄像装置可设置在机器人本体的顶部表面和侧部表面的交接处,例如,在一实现方式中,可在邻设于机器人本体的顶部表面和侧部表面的交接处设置至少一凹陷结构,将所述至少一摄像装置设置于对应的至少一凹陷结构内,如此,可使得所述摄像装置具有更为宽广的摄像视角,获得信息量更多的图像资料,借助所述摄像装置的图像资料来获得更精准的距离测量并确定移动机器人的位置及姿态,提高基于视觉同时定位与地图构建的精准度及可靠性。关于凹陷结构及其摄像装置的设置位置、设置方式、设计结构、工作方式等信息可参阅本技术人于2017年11月20日提交的专利申请(发明名称:移动机器人,公告号:cn207424680u)中的相关描述,在此不再赘述。
158.所述感知系统可包括多种不同用途的各类传感器,这些传感器包括但不限于压力传感器、重力感应器、测距传感器、悬崖传感器、跌落传感器、碰撞检测传感器等中的任一或多个组合。
159.在某些实施例中,压力传感器可设置在驱动轮的减震装置上,通过检测减震装置压力变化来确定移动装置是否经过清扫区域的凹凸表面,当清洁机器人经过凹凸表面时,减震装置的减震运动使得所述压力传感器输出不同于在平坦地面压力信号的压力信号。在某些实施例中,压力传感器可设置在清洁机器人的防撞组件(例如保险杠等)上,当所述防撞组件碰撞到障碍物时,所述防撞组件的减压振动使得该压力传感器输出基于碰撞而产生的压力信号。
160.在某些实施例中,重力感应器可设置在机器人本体的任意位置处,通过检测清洁机器人重力值来确定移动装置是否经过清扫区域的凹凸表面,当清洁机器人经过凹凸表面时,清洁机器人的重力值发生变化。
161.测距传感器既可以检测清洁机器人的底盘与地面之间的垂向距离变化也可检测清洁机器人与周边物体之间的距离变化。在某些实施例中,测距传感器可设置在清洁机器人的底盘,通过检测清洁机器人的底盘与地板表面之间的距离来确定移动装置是否经过清扫区域的凹凸表面,当清洁机器人经过凹凸表面时,测距传感器能够检测到清洁机器人底盘与地面之间的距离变化。在某些实施例中,测距传感器可设置在清洁机器人的防撞组件上,用于在清洁机器人在行进时,测距传感器能够检测到清洁机器人与清洁环境中其他物体的距离变化。如前所述,以防撞组件为保险杠为例,所述保险杠为圆弧片状,设置在机器人本体的前部。在一具体实现上,测距传感器可包括红外测距传感器,红外测距传感器的数量可为多个,例如,红外测距传感器的数量可为四路、六路或八路,分别对称设置于所述保险杠的相对两侧。每一路红外测距传感器具有红外信号发射器和红外信号接收器,利用红
外信号发射器发射出一束红外光,在照射到物体后形成反射,反射的红外光再被红外信号接收器接收,根据红外线发射与接收的时间差数据,计算得出清洁机器人与物体之间的距离。在一具体实现上,测距传感器可包括tof传感器,tof(time of flight)即飞行时间技术。tof传感器的数量可为多个,例如,tof传感器的数量为两个,分别对称设置于所述保险杠的相对两侧。tof传感器通过发射经调制的近红外光,遇物体后反射,接收反射的光线,通过计算光线发射和反射时间差或相位差,计算得出清洁机器人与物体之间的距离。在一具体实现上,测距传感器可包括超声测距传感器,所述超声测距传感器可设置在所述保险杠中居中的最前端上。所述超声测距传感器具有超声波发射器和声波接收器,超声波发射器用于发射超声波,在发射时刻的同时计数器开始计时,超声波在空气中传播,途中碰到物体阻挡就立即反射回来,超声波接收器收到反射回的超声波就立即停止计时,从而根据计时器记录的时间,计算出清洁机器人与物体之间的距离。在实际应用中,上述各类测距传感器也可组合使用,通过多种方式的测距方式,在测距范围、测距准确性以及成本等方面获得较好的平衡。
162.碰撞检测传感器设置于机器人本体上且与保险杠相关联,主要包括光线发射器、光线接收器以及位于光线发射器和光线接收器之间的碰撞伸缩杆,在正常状态下,碰撞伸缩杆处于初始位置,光线发射器和光线接收器之间光路畅通,当清洁机器人躲闪不及而碰撞到障碍物时,位于清洁机器人前部的保险杠将受到障碍物的冲击而相对机器人本体内陷,此时,位于保险杠内侧的碰撞伸缩杆经受力后收缩并阻挡在光线发射器和光线接收器之间,光线发射器和光线接收器之间的光路被切断,碰撞检测传感器发出碰撞信号。
163.悬崖传感器设置于机器人本体的底部。在某些实施例中,悬崖传感器的数量为多个,例如为四个,分别设置于机器人本体底部的前端,用于向地面发射感知信号并利用反射而接收的信号来感知悬崖。悬崖传感器还称为悬空传感器,悬崖传感器是主要利用多种形态的光传感器,在某些实施例中,悬崖传感器可采用红外线传感器,具有红外信号发射器和红外信号接收器,如此,可通过发射红外光线和接收反射的红外光线来感知悬崖,更进一步地,能够分析悬崖的深度。
164.当然,在某些实施例中,所述传感装置还可包括其他传感器,例如,磁力计、加速度计、陀螺仪、里程计等。
165.所述控制系统设置在所述壳体内,用于控制各所述系统工作。在一实施例中,所述控制系统设置在机器人本体内的电路板上,包括存储器(例如硬盘、快闪存储器、随机存取存储器)和处理器(例如中央处理单元、应用处理器)等。所述处理器根据感知系统中的激光测距装置反馈的物体信息利用定位算法(例如slam)来绘制清洁机器人所在环境中的即时地图,或者,所述处理器根据感知系统中的摄像装置所拍摄的图像信息利用定位算法(例如vslam)来绘制清洁机器人所在环境中的即时地图,从而基于绘制的即时地图信息规划最为高效合理的清扫路径和清扫方式,大大提高机器人的清扫效率。并且,结合感知系统中的其他传感器(例如:压力传感器、重力感应器、测距传感器、悬崖传感器、跌落传感器、碰撞检测传感器、磁力计、加速度计、陀螺仪、里程计等)反馈的距离信息、速度信息、姿态信息等综合判断扫地机当前处于何种工作状态,从而能针对不同情况给出具体的下一步动作策略,向清洁机器人发出相应的控制指令。
166.通过本技术公开的清洁机器人对地面作清扫工作时,能有效地防止或减少毛发缠
绕于清洁组件上以及将缠绕于清洁组件上的毛发清除,不仅免除或大大减少了人工清理辊刷,增强了用户体验感,而且提高了清洁机器人的清洁效率。
167.上述实施例仅例示性说明本技术的原理及其功效,而非用于限制本技术。任何熟悉此技术的人士皆可在不违背本技术的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本技术所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本技术的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。