1.本发明涉及相控阵天气雷达技术领域,特别是一种相控阵天气雷达标定机外验证系统。
背景技术:
2.相控阵天气雷达对目标的探测原理与常规多普勒天气雷达相同,都是通过发射机、天线发射朝一定的方向发射电磁波,电磁波遇到目标(雨滴、雪、冰晶、冰雹等)时,其后向散射的能量回到雷达天线,被接收机接收,获取目标信号强度。
3.cn201910370672.4(公开日20190628)公开了一种相控阵天气雷达机内标校系统,包括:信号收发组件,用于信号采集与标校后的信号输出;标定单元,用于产生激励信号并发送激励信号至信号收发组件;数据处理端,用于幅值、相值差值计算与幅相修正参数计算,并将计算结果输出至信号收发组件。
4.在这个过程中,相控阵天气雷达的各个组件及其电子元件会随着不同季节温度、湿度等环境要素的变化而产生变化,会给雷达整机系统标定带来一定的挑战。另外,由于相控阵天气雷达采用的阵列天线结构,其波束宽度、收发增益等参数将随扫描角度而变化,同时,由于相控阵天气雷达一般采用的波束较宽,不同仰角下天线副瓣的影响也会发生变化,导致标定难度进一步提升,从而对雷达资料产生影响。
5.实时定量分析上述因素带来的系统误差,并对雷达整机系统标定进行系统误差验证,是确保雷达探测数据质量的重要手段,验证结果将有助于进一步指导雷达标定。
6.由于外场试验或实际观测时,一般无法满足两部雷达同场地观测的条件,而采用无人机标校等成本较高,无法多次实时标校。
技术实现要素:
7.针对现有技术中存在的问题,本发明提供了一种可利用观测网内的任意已标校多普勒天气雷达,基于自然目标,自动计算获取符合条件的自然目标,进行系统误差的统计和计算,完成雷达整机的系统误差验证的相控阵天气雷达标定机外验证系统。
8.本发明的目的通过以下技术方案实现。
9.一种相控阵天气雷达标定机外验证系统,所述相控阵天气雷达系统的探测数据由数据采集单元采集数据后,以基数据的形式网络传输至雷达产品生成系统,由雷达产品生成系统对数据进行处理和产品加工后,分别传输至显示终端或客户指定的其他数据中心,所述雷达产品生成系统中设有机外验证系统,所述机外验证系统的数据处理中设有数据融合模块,所述机外验证系统的数据处理中设有共同自然目标获取模块,所述共同自然目标获取模块的数据处理中设有空间分析模块和强度分析模块,所述机外验证系统的数据处理中设有系统误差分析验证模块。
10.包括健康管理系统,所述健康管理系统进行相控阵天气雷达状态获取和记录,在健康管理系统的数据库中设有机外验证日志。
11.机外验证包括如下步骤:a) 相控阵天气雷达正常开机;b)在雷达产品生成系统上选择机外验证系统,点击“验证设置”,在弹出的界面中,分别选择需要进行机外验证的目标雷达以及参照雷达的数据路径;c)数据处理启动
ꢀ“
数据融合模块”,数据融合模块根据机外验证系统提供雷达数据,自动识别数据类型,融合成相同的标准数据格式;d)数据处理启动“共同自然目标获取模块”,共同自然目标获取模块先启动“空间分析模块”,空间分析模块的算法将根据不同雷达的经纬度、高度位置信息,结合地物分布特征,基于地球曲率订正、标准大气折射条件,计算获取出符合高度、距离、仰角条件的空间共同自然目标;e)共同自然目标获取模块随后启动“强度分析模块”,强度分析模块中的算法将根据空间分析模块中提供的结果,分析每个结果的绝对强度、传播累积强度信息,再次过滤、提取符合传播路径要求的共同自然目标;f) 数据处理启动“系统误差分析验证模块”,系统误差分析验证模块根据共同自然目标获取模块完成后提供的结果,对不同结果进行不同步长的划分,统计不同步长下样本的均值、中位值、标准差统计特征,将不同雷达的结果,进行不同步长下的误差计算并绘图展示,根据结果自动判断误差可靠性并对系统误差进行修正;g)机外验证结束。
12.步骤d)中空间分析模块的算法:假设相控阵雷达的站点位置为,其中,代表站点的经度,代表其纬度,代表其高度,可采用如公式(1)、(2)、(3)计算得出相控阵雷达探测空间内某个空间点1 的,其中,a1为空间点1的方位,e1为其仰角,l1为其斜距,为该点计算得出的经度,为纬度,h为高度,下式中s为两点间地球表面的投影距离,其通过公式(4)计算得出,r
e
为地球半径; 在获取空间点1的位置信息后,结合已标定雷达的站点位置,其中,代表已标定雷达站点的经度,代表其纬度, 代表其高度,根据公式(5)计算得出两点地球表面的投影距离为后,可通过公式(6)计算得出空间点1相对于已标定雷达的斜距l2,之后通过球面三角公式(7) (8)建立的关系,可推导出公式(9)(10),反算得出空间点1相对于已标定雷达的方位和仰角,从而结合空间点1和观测网内已标定雷达对应的空间点2的数据进行标定,其中r
m
为等效地球半径,约为4/3的地球半径长度;
ꢀ
。
13.相比于现有技术,本发明的优点在于:本发明专利针对相控阵天气雷达设计出的机外验证系统,不依赖于雷达的地理位置以及机外标校仪器,不限制相控阵雷达不同仰角的工作模式,可实时订正雷达整机系统的系统误差,操作简单、耦合度低、实时性强、精度高,可嵌入在产品生成系统中,成本低。
14.本发明提出了切实可行的设计思想,并已具体实现。采用机外验证系统的相控阵天气雷达已安装并投入正式使用,在长期的观测过程中,能较好地验证雷达整机系统误差,通过相关部门检测,各项指标均满足设计要求,使用效果良好。
15.本发明适用于相控阵天气雷达的系统设计。
附图说明
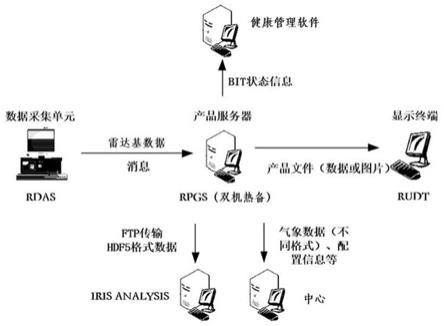
16.图1为本发明某相控阵天气雷达软件分系统结构图。
17.图2为本发明流程图。
18.图3为筛选出共同自然目标的散点图。
19.图4为不同步长下的样本占比、标准差以及平均误差。
具体实施方式
20.下面结合说明书附图和具体的实施例,对本发明作详细描述。
21.某相控阵天气雷达的软件分系统架构(见图1)分为多个分系统,该雷达系统的探测数据由数据采集单元(rdas)采集数据后,以基数据的形式网络传输至雷达产品生成系统(rpgs),由产品生成系统对数据进行处理和产品加工后,分别传输至显示终端(rudt)、客户指定的其他数据中心,从而完成对观测雷达资料的应用。所述雷达产品生成系统中设有机外验证系统,所述机外验证系统的数据处理中设有数据融合模块,所述机外验证系统的数
据处理中设有共同自然目标获取模块,所述共同自然目标获取模块的数据处理中设有空间分析模块和强度分析模块,所述机外验证系统的数据处理中设有系统误差分析验证模块。
22.包括健康管理系统,所述健康管理系统进行相控阵天气雷达状态获取和记录,在健康管理系统的数据库中设有机外验证日志。
23.机外验证系统与上述产品生成系统融合,达到了设计简洁低成本的目的。机外验证系统由产品生成系统对应的交互接口自动控制,其工作流程图见图2。机外验证包括如下步骤:a)相控阵天气雷达正常开机;b)在雷达产品生成系统上选择机外验证系统,点击“验证设置”,在弹出的界面中,分别选择需要进行机外验证的目标雷达以及参照雷达的数据路径;c)数据处理启动
ꢀ“
数据融合模块”,数据融合模块根据机外验证系统提供雷达数据,自动识别数据类型(兼容国内主流业务雷达格式以及国外雷达系统的数据格式hdf5),融合成相同的标准数据格式;d)数据处理启动“共同自然目标获取模块”,共同自然目标获取模块先启动“空间分析模块”,空间分析模块的算法将根据不同雷达的经纬度、高度位置信息,结合地物分布特征,基于地球曲率订正、标准大气折射条件,计算获取出符合高度、距离、仰角条件的空间共同自然目标;e)共同自然目标获取模块随后启动“强度分析模块”,强度分析模块中的算法将根据空间分析模块中提供的结果,分析每个结果的绝对强度、传播累积强度信息,再次过滤、提取符合传播路径要求的共同自然目标;f)数据处理启动“系统误差分析验证模块”,系统误差分析验证模块根据共同自然目标获取模块完成后提供的结果,对不同结果进行不同步长的划分,统计不同步长下样本的均值、中位值、标准差统计特征,将不同雷达的结果,进行不同步长下的误差计算并绘图展示,根据结果自动判断误差可靠性并对系统误差进行修正;g)机外验证结束。
24.步骤d)中空间分析模块的算法:假设相控阵雷达的站点位置为 ,其中,代表站点的经度,代表其纬度,代表其高度,可采用如公式(1)、(2)、(3)计算得出相控阵雷达探测空间内某个空间点1 的,其中,a1为空间点1的方位,e1为其仰角,l1为其斜距,为该点计算得出的经度,为纬度,h为高度,下式中s为两点间地球表面的投影距离,其通过公式(4)计算得出,r
e
为地球半径; 在获取空间点1的位置信息后,结合已标定雷达的站点位置
,其中,代表已标定雷达站点的经度,代表其纬度, 代表其高度,根据公式(5)计算得出两点地球表面的投影距离为后,可通过公式(6)计算得出空间点1相对于已标定雷达的斜距l2,之后通过球面三角公式(7) (8)建立的关系,可推导出公式(9)(10),反算得出空间点1相对于已标定雷达的方位和仰角,从而结合空间点1和观测网内已标定雷达对应的空间点2的数据进行标定,其中r
m
为等效地球半径,约为4/3的地球半径长度;半径长度; 。
实施例
25.根据某相控阵雷达的某次观测结果,获取了对应时刻的同观测网内
‑
国外雷达的数据,下面通过产品生成系统的机外验证系统对雷达进行系统误差的机外验证。
26.a)雷达正常开机;b)在产品生成系统上选择机外验证模块,点击“验证设置”,在弹出的界面中,分别选择需要进行机外验证的目标雷达以及参照雷达的数据路径,如某相控阵雷达数据名为“qzbadbvt200823210241730.040.gz”,而国外雷达数据具备自有格式,分参量存储,对应时次的数据名为“2020082321020400dbz.vol”。
27.c)数据处理启动
ꢀ“
数据融合模块2”,数据融合模块2根据外验证系统1提供雷达数据,自动识别数据类型(兼容国内主流业务雷达格式以及国外vaisala\rainbow雷达系统的数据格式),融合成相同的标准数据格式。
28.d)数据处理启动“共同自然目标获取模块3”,共同自然目标获取模块3先启动“空间分析模块4”,空间分析模块4的算法将根据不同雷达的经纬度、高度位置信息,结合地物分布特征,基于地球曲率订正、标准大气折射条件,计算获取出符合高度、距离、仰角条件的
空间共同自然目标,本次个例共有11个时次的数据,通过3共获取到110394个空间共同自然目标点;共同自然目标获取模块3随后启动“强度分析模块5”,强度分析模块5中的算法将根据空间分析模块4中提供的结果,分析每个结果的绝对强度、传播累积强度等信息,再次过滤、提取符合传播路径要求的共同自然目标,共计72072个。
29.e)数据处理启动“系统误差分析验证模块6”,系统误差分析验证模块6根据共同自然目标获取模块完成后提供的结果,对不同结果进行以5个分贝作为步长,进行划分,统计不同步长下样本的均值、中位值、标准差等统计特征,将不同雷达的结果,进行不同步长下的误差计算并绘图展示见图3和4所示,根据结果,本次机外验证的结果中,标准差满足阈值,可靠性高,系统自动判断误差可靠性并对系统误差进行修正。而根据结果所示,两部雷达的平均误差在
‑
0.11分贝,证明通过验证,当前相控阵雷达的整机系统误差已经标定较好,与组网内已标定雷达的结果一致。通过长期的机外验证,统计了多次的验证结果如表1所示:表1 长期机外验证结果
个例日期201909122019110920191129201912152020010520200823平均误差(dbz)
‑
0.12
‑
0.11
‑
0.090.070.06
‑
0.11样本数(个)361774356917444664164388772072样本中位值(dbz)17.7515.3712.4115.9312.217.12
可见雷达的状态较为稳定,长时间运行以来的系统误差都较小,标定结果准确。
30.f)机外验证结束。
31.本发明针对相控阵天气雷达的需求,设计出一套机外验证系统,可利用观测网内的任意已标校多普勒天气雷达,基于自然目标,自动计算获取符合条件的自然目标,进行系统误差的统计和计算,完成雷达整机的系统误差验证。
32.该机外验证系统具有以下突出优点:1) 各个模块一键完成,操作简单,实现快捷,实时性强;2) 不依赖雷达型号或位置,耦合度低;3) 位置计算精确到米级,观测结果计算精确到小数级,精度高;4) 每个步骤自动记录日志,便于排查故障;5)系统构架简洁、成本低。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。