1.本技术属于晶圆生产设备技术领域,尤其是涉及一种晶圆倒盒装置。
背景技术:
2.晶圆在被加工成形及抛光处理的过程中,由于会与各种有机物、粒子及金属接触而被污染,如需要去除光刻胶、去除腐蚀剂、去除颗粒物,因此需要通过晶圆清洗来清除污染物。
3.在清洗过程中需要使用不同的清洗剂,因此在使用不同清洗剂的清洗槽内进行清洗时,需要多晶圆进行倒盒,也即将晶圆从一个晶圆盒转移到另一个晶圆盒。现有技术中,晶圆盒中晶圆的转移,通常需要机械手进行转移,结构较为复杂,通常机械手抓取多个晶圆时,容易损坏晶圆。
技术实现要素:
4.本发明要解决的技术问题是:为解决现有技术中的不足,从而提供一种能够自动对晶圆进行转移的晶圆倒盒装置。
5.本发明解决其技术问题所采用的技术方案是:一种晶圆倒盒装置,包括:框架;工作平台,设置在框架内;倒盒机构,设置在工作平台上,包括相对设置的第一旋转组件和第二旋转组件;空盒运输机构,用于向第二旋转组件提供空晶圆盒或者存储从第一旋转组件运输的空晶圆盒;所述第一旋转组件,包括用于承载晶圆盒的第一旋转座,第一旋转轴和第一旋转驱动电机,第一旋转驱动电机能够驱动第一旋转座绕第一旋转轴旋转,还包括固定于第一旋转座上的第一定位总成和推动总成;所述第一旋转座包括相互垂直的第一发出固定板,第二发出固定板;所述第一定位总成,包括设置于第一发出固定板上的第一滑动定位座,设置于第一滑动定位座一侧的两个第一固定定位块,设置于第一滑动定位座另一侧的两个第一侧边定位块,发出端滑动定位驱动件推动晶圆盒靠近第一固定定位块以对晶圆盒进行固定;还包括设置于第二发出固定板上的远离第一发出固定板一侧的位置设置有第二固定定位块;所述滑动定位座由第二滑动定位驱动件驱动而使滑动定位座靠近或者远离第二接收固定板;所述推动总成用于推动第一旋转组件上晶圆盒内的晶圆进入第二旋转组件上的晶圆盒内;第二旋转组件包括用于承载晶圆盒的第二旋转座,第二旋转轴和第二旋转驱动电机,第二旋转驱动电机能够驱动第二旋转座绕第二旋转轴旋转;
第二旋转座包括相互垂直的第一接收固定板和第二接收固定板;第二定位总成,包括设置于第一接收固定板上的第二滑动定位座,设置于第二滑动定位座一侧的两个第三固定定位块,设置于第二滑动定位座另一侧的两个第二侧边定位块,接收端滑动定位驱动件推动晶圆盒靠近第三固定定位块以对进行固定;还包括设置于第二接收固定板上的远离第一接收固定板一侧的位置设置有第四固定定位块。
6.优选地,本发明的晶圆倒盒装置,所述推动总成包括推杆,推动滑轨和推动驱动器,推动驱动器驱动推杆在推动滑轨上运动,使推杆穿过第一旋转座上的第一过孔推动晶圆盒内的晶圆进入第二旋转组件上的晶圆盒完成倒盒。
7.优选地,本发明的晶圆倒盒装置,第一侧边定位块、第二侧边定位块、第一固定定位块、第二固定定位块、第三固定定位块和第四固定定位块均为l形。
8.优选地,本发明的晶圆倒盒装置,第二发出固定板和第二接收固定板上分别设置有滚轮支撑固定第一滑动定位座和第二滑动定位座。
9.优选地,本发明的晶圆倒盒装置,第二滑动定位座由第二滑动定位驱动件驱动而使第二滑动定位座靠近或者远离第二接收固定板;第一滑动定位座由第一滑动定位驱动件驱动而使第一滑动定位座靠近或者远离第二发出固定板。
10.优选地,本发明的晶圆倒盒装置,在第二旋转组件处还设置有升降组件,用于顶起第二旋转组件的晶圆盒。
11.优选地,本发明的晶圆倒盒装置,所述升降组件包括升降块及升降驱动件,升降驱动件驱动升降块从第二过孔处穿出,以将晶圆盒顶出升起。
12.优选地,本发明的晶圆倒盒装置,第二发出固定板和第二接收固定板中间位置的还设置有用于卡住晶圆盒边缘的卡块。
13.优选地,本发明的晶圆倒盒装置,所述卡块中间具有v形卡槽。
14.本发明的有益效果是:本发明的晶圆倒盒装置,需要进行倒盒时,满载晶圆的晶圆盒放置到第一旋转组件上,空的晶圆盒放置到第二旋转组件上,第一旋转组件和第二旋转组件旋转使晶圆盒相对设置,之后由推动总成推动第一旋转组件上的晶圆盒内的晶圆推动到第二旋转组件上的晶圆盒内,而后,第一旋转组件和第二旋转组件旋转回归图位置,满载晶圆的晶圆盒和空的晶圆盒均被机械手抓走,可继续进行下一个晶圆的转移。
附图说明
15.下面结合附图和实施例对本技术的技术方案进一步说明。
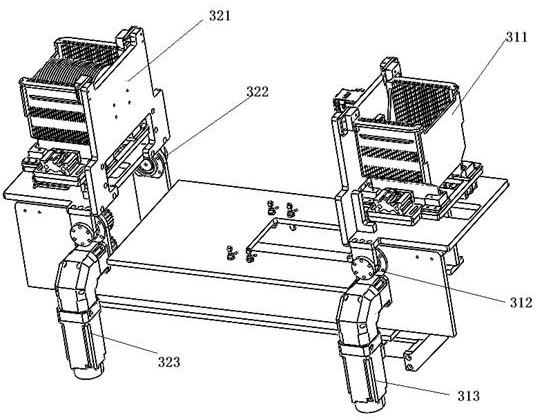
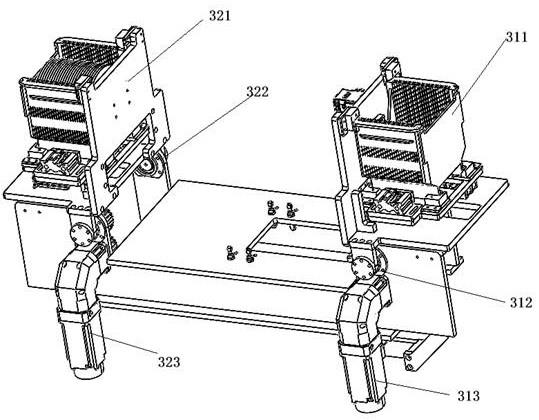
16.图1是本技术实施例的晶圆倒盒装置的结构示意图;图2是本技术实施例的工作台处的结构示意图;图3是本技术实施例的第一旋转组件和第二旋转组件打开时的结构示意图;图4是本技术实施例的第一旋转组件和第二旋转组件对接时的结构示意图;(注:图中虽然两个晶圆盒都有晶圆,但通常情况下仅有一个晶圆盒具有晶圆)图5是本技术实施例的第一旋转组件和第二旋转组件对接时的侧向视角的结构示意图;(注:图中虽然两个晶圆盒都有晶圆,但通常情况下仅有一个晶圆盒具有晶圆)
图6是本技术实施例的第一旋转组件的结构示意图;图7是本技术实施例的具有晶圆盒时第二旋转组件的结构示意图;图8是本技术实施例的无晶圆盒时第二旋转组件的结构示意图;图9是本技术实施例的升降组件的结构示意图;图10是本技术实施例的滚轮位置的结构示意图。
17.图中的附图标记为:1ꢀ框架;2ꢀ工作平台;3ꢀ倒盒机构;4ꢀ空盒运输机构;9ꢀ晶圆盒;31ꢀ第一旋转组件;32ꢀ第二旋转组件;33ꢀ滚轮;311ꢀ第一旋转座;312ꢀ第一旋转轴;313ꢀ第一旋转驱动电机;314ꢀ第一定位总成;319ꢀ推动总成;321ꢀ第二旋转座;322ꢀ第二旋转轴;323ꢀ第二旋转驱动电机;324ꢀ第二定位总成;329ꢀ升降组件;3111ꢀ第一发出固定板;3112ꢀ第二发出固定板3140ꢀ第一滑动定位座;3141ꢀ第二固定定位块;3142ꢀ第一卡块;3143ꢀ第一固定定位块;3144ꢀ第一侧边定位块;3145ꢀ发出端滑动定位驱动件;3146ꢀ第一滑动定位驱动件;3191ꢀ推杆;3192ꢀ推动滑轨;3193ꢀ推动驱动器;3211ꢀ第一接收固定板;3212ꢀ第二接收固定板;3240ꢀ第二滑动定位座;
3241ꢀ第四固定定位块;3242ꢀ第二卡块;3243ꢀ第三固定定位块;3244ꢀ第二侧边定位块;3245ꢀ接收端滑动定位驱动件;3246ꢀ第二滑动定位驱动件;3291ꢀ升降块;3292ꢀ升降驱动件;31111ꢀ第一过孔;32111ꢀ第二过孔。
具体实施方式
18.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
19.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
20.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本技术中的具体含义。
21.下面将参考附图并结合实施例来详细说明本技术的技术方案。
22.实施例1本实施例提供一种晶圆倒盒装置,如图1所示,包括:框架1;工作平台2,设置在框架1内,如图2所示;倒盒机构3,设置在工作平台2上,包括相对设置的第一旋转组件31和第二旋转组件32,能够将位于第一旋转组件31的晶圆盒内的晶圆转移到第二旋转组件32的晶圆盒内;空盒运输机构4,用于向第二旋转组件32提供空晶圆盒或者存储从第一旋转组件31的空晶圆盒。
23.所述第一旋转组件31先用于承载具有晶圆的晶圆盒9,包括用于承载晶圆盒的第一旋转座311,第一旋转轴312和第一旋转驱动电机313,第一旋转驱动电机313能够驱动第一旋转座311绕第一旋转轴312旋转,还包括固定于第一旋转座311上的第一定位总成314和
推动总成319(第一定位总成314和推动总成319均跟随第一旋转座311运动);第一旋转座311包括相互垂直的第一发出固定板3111,第二发出固定板3112;第一定位总成314,如图7所示,包括设置于第一发出固定板3111上的第一滑动定位座3140,设置于第一滑动定位座3140一侧的两个第一固定定位块3143,设置于第一滑动定位座3140另一侧的两个第一侧边定位块3144,发出端滑动定位驱动件3145推动晶圆盒靠近第一固定定位块3143以对晶圆盒9进行固定,发出端滑动定位驱动件3145推动定位杆与另一侧的第一固定定位块3143完成对晶圆盒的固定;还包括设置于第二发出固定板3112上的远离第一发出固定板3111一侧的位置设置有第二固定定位块3141;所述第一旋转座311翻转时(从图3状态变为图4状态),晶圆盒9先被第一发出固定板3111支撑,第一滑动定位座3140滑动后靠近第二固定定位块3141,使晶圆盒抵靠第二发出固定板3112,翻转使晶圆“放倒”,第一发出固定板3111支撑时由发出端滑动定位驱动件3145卡紧晶圆盒9,需要抓走晶圆盒9时,由第一滑动定位座3140滑动后脱离对晶圆盒9的固定。
24.第一滑动定位座3140由第一滑动定位驱动件3146驱动而使第一滑动定位座3140靠近或者远离第二发出固定板3112。
25.所述推动总成319包括推杆3191,推动滑轨3192和推动驱动器3193,推动驱动器3193驱动推杆3191在推动滑轨3192上运动,使推杆3191穿过第一旋转座311上的第一过孔31111推动晶圆盒9上的晶圆进入第二旋转组件32上的晶圆盒完成倒盒。
26.第二旋转组件32,先用于承载空的晶圆盒9,包括用于承载晶圆盒的第二旋转座321,第二旋转轴322和第二旋转驱动电机323,第二旋转驱动电机323能够驱动第二旋转座321绕第二旋转轴322旋转,第二旋转座321包括相互垂直的第一接收固定板3211和第二接收固定板3212;第二定位总成324,如图8所示,包括设置于第一接收固定板3211上的第二滑动定位座3240,设置于第二滑动定位座3240一侧的两个第三固定定位块3243,设置于第二滑动定位座3240另一侧的两个第二侧边定位块3244,接收端滑动定位驱动件3245推动晶圆盒靠近第三固定定位块3243以对进行固定,还包括设置于第二接收固定板3212上的远离第一接收固定板3211一侧的位置设置有第四固定定位块3241;所述第二旋转座321翻转时(从图4状态变为图3状态),晶圆盒9先被第二接收固定板3212支撑,翻转后到达第一接收固定板3211,由接收端滑动定位驱动件3245与第三固定定位块3243一同卡紧晶圆盒9,由第二滑动定位座3240滑动后脱离固定,以便于晶圆盒9被抓走。
27.第二滑动定位座3240由第二滑动定位驱动件3246驱动而使第二滑动定位座3240靠近或者远离第二接收固定板3212;第二发出固定板3112和第二接收固定板3212中间位置的还设置有用于卡住晶圆盒边缘的具有v形卡槽的卡块(第一卡块3142和第二卡块3242),以与晶圆盒上的凸起进行配合固定。
28.如图9所示,在第二旋转组件32处还设置有升降组件329用于顶起第二旋转组件32的晶圆盒,包括升降块3291及升降驱动件3292,升降驱动件3292驱动升降块3291从第二过孔32111处穿出,以将晶圆盒顶出升起。
29.本实施例的晶圆倒盒装置,第一旋转组件31和第二旋转组件32承接新的晶圆盒9时,位置如图3所示,满载晶圆的晶圆盒9放置到第一旋转组件31上,空的晶圆盒9放置到第
二旋转组件32上,第一旋转组件31和第二旋转组件32旋转使晶圆盒9相对设置,如图4或5所示,之后由推动总成319推动第一旋转组件31上的晶圆盒9内的晶圆推动到第二旋转组件32上的晶圆盒9内,而后,第一旋转组件31和第二旋转组件32旋转回归图3位置,满载晶圆的晶圆盒9和空的晶圆盒9均被机械手抓走,可继续进行下一个晶圆的转移。
30.第一侧边定位块3144、第二侧边定位块3244、第一固定定位块3143、第二固定定位块3141、第三固定定位块3243和第四固定定位块3241均为l形。通过l形定位块,同时对晶圆盒进行两边的直角定位。
31.如图10所示,第二发出固定板3112和第二接收固定板3212上分别设置有滚轮33支撑固定第一滑动定位座3140和第二滑动定位座3240,以便于第二发出固定板3112和第二接收固定板3212滑动。
32.需要说明的是,装满晶圆的晶圆盒一般由机械手直接运输过来或者直接运输走。
33.以上述依据本技术的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项申请技术思想的范围内,进行多样的变更以及修改。本项申请的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。