1.本发明涉及水声通信领域,特别是一种基于凸优化的水下信道估计方法。
背景技术:
2.目前水下信道估计通常采用插入导频训练的方式。传统的信道估计方法通常采用最小二乘算法(lms),由于最小二乘算法容易被噪声干扰,并且子载波间干扰也会降低lms算法的性能。zhao y 等人提出一种应用变换域滤波器的导频降噪方法,张晓利等人提出一种基于压缩感知的自适应稀疏水声信道估计算法,将压缩感知算法omp/cosamp与硬门限lms算法结合,对水声信道冲激响应进行估计;王永刚等人提出了基于导频的ofdm水下通信信道估计,对训练导频进行了改进, 将水声信道看做梳状滤波器, 利用改进的变换域滤波器导频降噪方法,改善子载波间干扰问题。但这些算法需要已知信道的稀疏性质,而在实际的水下坏境中,由于复杂的水下时空传播信道通常不满足稀疏性,因此不易采用稀疏类算法。
3.另外,水下双工通信系统同时进行接收和发射操作。接收到的数据,经过了长距离的衰减变得十分微弱;而自身的发射信号,为了能够传播到更远的距离,通常需要大功率功放驱动换能器发射信号。因此,接收到的数据受到了自身发射信号的影响。
技术实现要素:
4.本发明的目的是要解决现有技术中存在的不足,提供一种基于凸优化的水下信道估计方法。
5.为达到上述目的,本发明是按照以下技术方案实施的:一种基于凸优化的水下信道估计方法,包括以下步骤:s1、假设多输入多输出系统有j个接收换能器,p个发射换能器,假设接收换能器接收到的数据为,p个发射换能器发射数据为,第p个发射换能器到第j个接收换能器的信道为,m是信道长度,则有第j个接收阵元的数据为:;其中,是噪声,是由发射数据生成的矩阵,如下:;s2、最小化接收数据和信号与信道的卷积误差:
;其中,为由构成的矩阵,;并采用lagrange方法对接收数据和信号与信道的卷积误差进行求解,得到信道的估计值;s3、在信赖域中寻找一个最小误差的信道,并引入随时间变化的正则化系数,当每一帧信号到来时,更新信道的估计值。
6.进一步地,所述步骤s2中,采用lagrange方法对接收数据和信号与信道的卷积误差进行求解具体步骤为:令:;对求梯度,得到:;令梯度等于0,得到信道的估计值:。
7.进一步地,所述步骤s3具体包括:在信赖域中寻找一个最小误差的信道:;其中上标表示第i帧的数据, 是误差系数;其等价形式,并且引入随时间变化的正则化系数得:;当每一帧信号到来时,得到更新公式用于更新信道的估计值:。
8.与现有技术相比,本发明能够在未知水声环境下实现对信道估计算法的自适应调整,以较高的计算效率而实现对水声信道的精确估计,满足未知水声信道环境下的精确信道估计及通信应用需要;而且还能够估计出经过水声信道的发射信号,因此可以通过信道估计的方式,降低自身发射换能器对系统的影响。
附图说明
9.图1为仿真例1ucembco与lms方法估计的信道仿真估计结果。
10.图2为仿真例2ucembco方法与lms方法估计的信道的误差。
11.图3为仿真例3ucembco方法与lms方法估计的信道的误差。
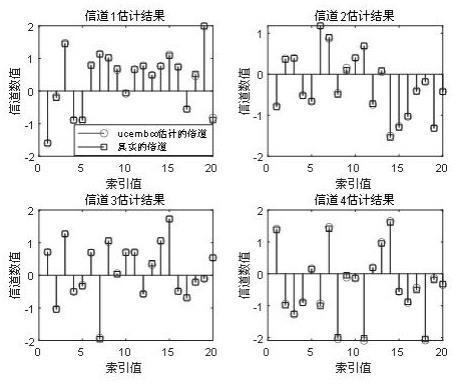
12.图4为仿真例4ucembco方法与lms方法估计的信道的误差。
具体实施方式
13.为使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步的详细说明。此处所描述的具体实施例仅用于解释本发明,并不用于限定发明。
14.本实施例提供了一种基于凸优化的水下信道估计方法,包括以下步骤:假设多输入多输出系统有j个接收换能器,p个发射换能器,假设接收换能器接收到的数据为,p个发射换能器发射数据为,第p个发射换能器到第j个接收换能器的信道为,m是信道长度,则有第j个接收阵元的数据为:为:
ꢀꢀ
(1)其中,是噪声,是由发射数据生成的矩阵,如下:(2)s2、最小化接收数据和信号与信道的卷积误差:(3)其中,为由构成的矩阵,;有式3)可知,其是一个 无约束的凸问题,显然满足强对偶。然后采用lagrange方法对接收数据和信号与信道的卷积误差进行求解:令:(4)对求梯度,得到:(5)令梯度等于0,得到信道的估计值:(7);
s3、在信赖域中寻找一个最小误差的信道,并引入随时间变化的正则化系数,当每一帧信号到来时,更新信道的估计值。
15.进一步地,所述步骤s2中,采用lagrange方法对接收数据和信号与信道的卷积误差进行求解具体步骤为:令:(8);对求梯度,得到:(9);令梯度等于0,得到信道的估计值:(10)。
16.在多输入多输出中的具体算法流程如下:1、给出p个发射阵元的发射数据以及j个接收阵元的接收数据。如果存在预估计的信道,则使用这个结果进行之后的计算;否则初始化;2、循环 l = 0到 p
‑
1;3、循环,直到满足收敛条件(例如,更新前后信道变化小于预先设定值)或循环次数超过预设次数时,跳出循环;4、循环 j = 0 到 j
‑
1;5、;6、输出信道估计结果。
17.验证上述算法的敛散性:
ꢀꢀꢀ
(11)
当不同发射阵元发射数据不相关且噪声与发射信号不相关时有
ꢀꢀ
(12)所以算法无偏收敛。
18.在考虑到以信号流(信号以帧的形式被接收系统得到)的方式进行信道估计时,在信赖域中寻找一个最小误差的信道:(13);其中上标表示第i帧的数据, 是误差系数;其等价形式,并且引入随时间变化的正则化系数得:(14);当每一帧信号到来时,得到更新公式用于更新信道的估计值:(15)。
19.当面对复杂环境时,可以根据环境的变换选择正则化系数。如果环境随着时间发生快速的变化,则应当设置较小的,使得估计结果能够跟随环境变化;当环境变化速度较慢时,可以选择较大的,保证更新的稳定性。
20.在多输入多输出中的具体算法流程如下:1、在第i帧的处理中,给出发射数据以及接收数据,给出上一帧的估计结果,如果是在第一帧的情况下,;2、循环 l = 0 到 p
‑
1;3、循环,直到或者到达循环次数上限;4、循环 j = 0 到 j
‑
1;5、;6、输出信道估计结果。
21.进一步地,为了验证本发明的能顾实现更高精度的信道估计,进行如下仿真实验:仿真例1设置单输入单输出的一个模型,发射信号为随机信号,信号长度为1024,添加5db信噪比的高斯白噪声。设定信道长度为200。采用lms算法作为对比,仿真结果如图1。从图1可以看出,采用本发明的方法ucembco估计得到的信道相比于lms更加的准确。
22.仿真例2假设一个1输入1输出信号模型,其中信道的长度设置为200,每一帧发射信号的长度为1024,发射信号为随机信号,添加0db的高斯白噪声。共发射50帧信号,观察信道估计结果的误差情况。
23.由于一帧的长度较长,因此两种算法在第一帧的计算中已经收敛。lms的方法绝对误差约为9,二ucembco的绝对误差小于1。仿真结果如图2所示,由图2可知,本发明的方法ucembco的误差远远低于lms方法,获得到更准确的信道估计结果。
24.仿真例3假设一个1输入1输出信号模型,其中信道的长度设置为200,每一帧发射信号的长度为512,发射信号为随机信号。信噪比设置为
‑
20db到20db,每间隔1db进行一次计算。每个信噪比设置下,进行50次仿真,取误差的平均值。
25.仿真结果如图3所示,由图3可知,在[
‑
20,20]db信噪比区间内,本发明的方法ucembco的估计误差始终小于lms。说明本发明的方法ucembco方法始终优于lms方法,随着信噪比的增加,本发明的方法ucembco的估计误差迅速下降,在实际环境中采用本发明的方法ucembco能够获得较好的结果。
[0026]
仿真例4假设一个2输入2输出信号模型,其中信道的长度设置为20,发射信号的长度为1024,发射信号为随机信号,添加0db的高斯白噪声。观察仿真结果如图4所示。由图4的结果显示,对于所有的信道,本发明的ucembco给出了十分准确的估计结果。
[0027]
本发明的技术方案不限于上述具体实施例的限制,凡是根据本发明的技术方案做出的技术变形,均落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。