1.本发明涉及一种状态监视系统、船舶及状态监视方法。
2.本技术主张对于2019年4月24日在日本技术的日本专利申请2019
‑
082946号的优先权,并将其内容援用于此。
背景技术:
3.在专利文献1中公开了一种构建用于在大型船舶中进行测量数据的通信的无线传感器网络的技术。
4.以往技术文献
5.专利文献
6.专利文献1:日本专利公开2014
‑
94584号公报
技术实现要素:
7.发明要解决的技术课题
8.船舶驾驶员通过监视设置在操舵室中的监视器而监视驾驶状况。因此,驾驶员在监视航行状况和操作船舶时无法离开操舵室。
9.本发明的目的在于提供一种能够在操舵室的外部监视驾驶状况的状态监视系统、船舶及状态监视方法。
10.用于解决技术课题的手段
11.根据本发明的第1方式,状态监视系统具备:测量装置,测量在船舶具备的金属制船体的内部存储的监视对象装置的状态;第1通信装置,设置于所述船体的外部,并发送表示所述监视对象装置的状态测量值的状态信号;及可携带的第2通信装置,经由所述第1通信装置接收所述状态信号,并输出与所述状态相关的信息。
12.根据本发明的第2方式,在第1方式所涉及的状态监视系统中,所述第2通信装置可以设置于具有设置在所述船体上的非金属性壁面的上部结构体的内部。
13.根据本发明的第3方式,在第1或第2方式所涉及的状态监视系统中,所述第2通信装置可以通过二次电池的电力而运转,所述状态监视系统具备充电装置,所述充电装置设置于具有设置在所述船体上的非金属性壁面的上部结构体的内部,并用于对所述第2通信装置的所述二次电池进行充电。
14.根据本发明的第4方式,在第1至第3方式中任一项所涉及的状态监视系统中,所述第2通信装置可以进行如下处理:将设定信号发送到所述第1通信装置,所述设定信号将可利用频带的多个信道中的一个信道设定为所述状态信号的发送信道;及从所述多个信道中设定接收所述状态信号的接收信道。
15.根据本发明的第5方式,在第1至第4方式中任一项所涉及的状态监视系统中,其可以具备控制所述监视对象装置的控制装置,所述第2通信装置发送指示控制所述监视对象装置的控制指示信号,所述第1通信装置接收所述控制指示信号,并将所述控制指示信号输
出到所述控制装置。
16.根据本发明的第6方式,在第5方式所涉及的状态监视系统中,所述监视对象装置可以具备所述船舶的主发动机及操舵装置,所述第2通信装置接受所述船舶的航线及所述主发动机的动作模式的输入,并发送用于按照所输入的航线及动作模式航行的所述控制指示信号,所述控制装置根据所述船舶的航线控制所述操舵装置,并根据所述动作模式控制所述主发动机。
17.根据本发明的第7方式,在第6方式所涉及的状态监视系统中,其可以具备测量所述船舶的位置信息的位置测量装置,所述第2通信装置进行如下处理:根据在所述主发动机的驱动开始时刻至驱动结束时刻之间测量的所述位置信息来确定航线候选;及通过选择所述航线候选而接受所述船舶的航线的输入。
18.根据本发明的第8方式,船舶具备:金属制船体;主发动机及操舵装置,其为在所述船体内部存储的监视对象装置;及第1至第7方式中任一项所涉及的状态监视系统。
19.根据本发明的第9方式,状态监视方法具备:测量装置测量在船舶具备的金属制船体的内部存储的监视对象装置的状态的步骤;设置于所述船体外部的第1通信装置发送表示所述监视对象装置的状态测量值的状态信号的步骤;在所述船体的外部使用的第2通信装置经由所述第1通信装置接收所述状态信号的步骤;及所述第2通信装置输出与所述状态相关的信息的步骤。
20.发明效果
21.根据上述方式,状态监视系统能够使用第2通信装置在船体外的任意场所监视驾驶状况。
附图说明
22.图1是表示第1实施方式所涉及的船舶的结构的概略图。
23.图2是表示第1实施方式所涉及的船舶的操舵室内部的结构的立体图。
24.图3是表示第1实施方式所涉及的第2通信装置的运算装置的结构的概略框图。
25.图4是表示第2实施方式所涉及的第2通信装置的运算装置的结构的概略框图。
26.图5是表示第3实施方式所涉及的船舶的结构的概略图。
27.图6是表示第3实施方式所涉及的第2通信装置的运算装置的结构的概略框图。
28.图7是表示第3实施方式所涉及的航行履历的确定方法的流程图。
29.图8是表示第3实施方式所涉及的自动操纵船舶方法的流程图。
30.图9是表示至少一个实施方式所涉及的计算机的结构的概略框图。
具体实施方式
31.<第1实施方式>
32.《船舶的结构》
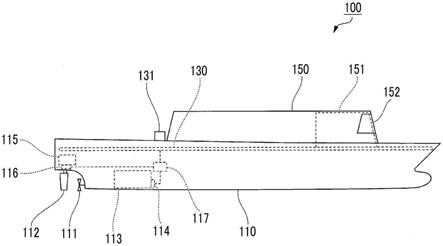
33.图1是表示第1实施方式所涉及的船舶的结构的概略图。
34.船舶100具备船体110、覆盖船体110上部的甲板130、设置在甲板130上部的上部结构体150。船体110、甲板130及上部结构体150由钢、铝或其他金属构成。在上部结构体150的内部形成操舵室151。在上部结构体150中,在相当于操舵室151的前表面的壁面上设置窗口
152。窗口152是非金属性壁面的一例。
35.在船体110上设置螺旋桨111及舵112。在船体110的内部设置主发动机113、旋转传感器114、操舵机115、舵角传感器116及信号处理装置117。
36.主发动机113例如是柴油发动机。主发动机113的主轴使螺旋桨111旋转。旋转传感器114测量主发动机113的主轴的转速。操舵机115对舵112赋予旋转力。操舵机115例如由液压驱动。舵角传感器116测量舵112的舵角。信号处理装置117对旋转传感器114及舵角传感器116的测量值进行处理。例如,信号处理装置117将旋转传感器114及舵角传感器116输出的模拟信号转换为数字信号。
37.主发动机113及操舵机115是监视对象装置的一例。旋转传感器114及舵角传感器116是测量装置的一例。
38.在甲板130的上表面上设置以有线或无线的方式与信号处理装置117连接的第1通信装置131。第1通信装置131通过无线通信将表示由信号处理装置117处理的测量值的状态信号发送到甲板130的上方,即船体110的外部。第1通信装置131例如使用920mhz频带(次千兆频带)的电波来发送状态信号。
39.在甲板130上设置用于以可通信的方式连接信号处理装置117与第1通信装置131的孔。在信号处理装置117与第1通信装置131有线连接的情况下,穿过孔配置通信用电缆。在信号处理装置117与第1通信装置131无线连接的情况下,孔使无线信号通过。因此,第1通信装置131的天线优选设置在孔的正上方,或者以贯穿孔的方式设置。
40.《操舵室的结构》
41.图2是表示第1实施方式所涉及的船舶的操舵室内部的结构的立体图。
42.在上部结构体150的操舵室151内设置第2通信装置170、充电装置153及操舵控制装置154。
43.第2通信装置170通过无线通信从第1通信装置131接收状态信号,并显示表示主发动机113及操舵机115的状态的信息。第2通信装置170具备运算装置171、触摸面板172及二次电池173。二次电池173供给用于使第2通信装置170运转的电力。作为第2通信装置170,例如能够使用平板终端。即,第2通信装置170以可携带的方式构成。可携带是指至少在框体的外部不设置电源装置而可以进行动作。
44.充电装置153是用于对第2通信装置170的二次电池173进行充电的支架。通过设置于第2通信装置170的未图示的端子与充电装置153的未图示的端子嵌合,从充电装置153对二次电池173进行充电。充电装置153沿着窗口152设置于窗口152的附近。窗口152由玻璃等非金属(电介质)构成,因此使电波通过。从而,通过沿着窗口152设置充电装置153,设置于充电装置153上的第2通信装置170能够通过窗口152接收第1通信装置131发送的无线信号。尤其,与更高频率的无线信号相比,次千兆频带的无线信号由于具有迂回障碍物的性质,因此在窗口152与第1通信装置131彼此不对置的情况下,也能够使无线信号到达操舵室151的内部。
45.操舵控制装置154接收驾驶员对操舵轮、操作杆等的操作,并向操舵机115输出指示舵角的控制信号。
46.即,根据第1实施方式,船舶100的驾驶员通过从充电装置153移除第2通信装置170,能够在任意场所监视船舶100的状态。另一方面,船舶100的驾驶员通过将第2通信装置
170安装于充电装置153,能够对第2通信装置170进行充电,并且能够在操舵室151的内部监视船舶100的状态。由此,在第2通信装置170的充电中,驾驶员也能够一边监视船舶100的状态,一边使用操舵控制装置154进行操舵操作。即,在二次电池173的充电量未达到足以使第2通信装置170运转的量的情况下,至少进行操舵操作时,也能够监视船舶100的状态。
47.《第2通信装置的结构》
48.图3是表示第1实施方式所涉及的第2通信装置的运算装置的结构的概略框图。
49.第2通信装置170的运算装置171具备信号接收部701和显示控制部702。信号接收部701从第1通信装置131接收状态信号。显示控制部702根据所接收到的状态信号生成显示画面,并输出到触摸面板172。
50.《动作/效果》
51.在第1实施方式中,旋转传感器114、舵角传感器116、信号处理装置117、第1通信装置131、第2通信装置170及充电装置153构成状态监视系统。
52.根据第1实施方式所涉及的状态监视系统,表示操舵机115的状态的状态信号从设置于船体110外部的第1通信装置131传输到可携带的第2通信装置170。由此,在船体110为金属制的情况下,船舶100的驾驶员也能够使用第2通信装置170在船体外的任意场所监视驾驶状况。
53.并且,根据第1实施方式,第2通信装置170设置于具有作为非金属性壁面的窗口152的上部结构体150的内部。来自第1通信装置131的无线信号能够通过窗口152到达上部结构体150的内部,因此驾驶员能够在上部结构体150的内部使用第2通信装置170。
54.并且,第1实施方式所涉及的状态监视系统具备充电装置153,该充电装置153设置于具有窗口152的上部结构体150的内部,并用于对第2通信装置170的二次电池173进行充电。由此,第2通信装置170在二次电池173的充电中也能够接收来自第1通信装置131的无线信号。即,驾驶员能够一边对第2通信装置170进行充电,一边监视船舶100的状态。
55.<第2实施方式>
56.根据第1实施方式所涉及的状态监视系统,第2通信装置170显示一艘船舶100的信息。相对于此,根据第2实施方式的状态监视系统,第2通信装置170能够显示在附近航行的多艘船舶100的信息。
57.《第2通信装置的结构》
58.图4是表示第2实施方式所涉及的第2通信装置的运算装置的结构的概略框图。
59.第2实施方式所涉及的运算装置171除了第1实施方式的结构以外,还具备信道设定部703及信道选择部704。
60.信道设定部703将设定信号发送到第1通信装置131,所述设定信号在次千兆频带的多个信道中,将由利用者经由触摸面板172选择的信道设定为状态信号的发送信道。发送信道的设定画面由显示控制部702生成,并显示于触摸面板172。在发送信道的设定画面中包括可利用的多个信道列表。
61.信道选择部704在可以捕获信号的信道中,将由利用者经由触摸面板172选择的信道设定为基于信号接收部701的接收信道。接收信道的选择画面由显示控制部702生成,并显示于触摸面板172。在接收信道的选择画面中,包括可捕获的多个信道列表。可捕获的信道例如通过信号接收部701扫描各个信道而被确定。
62.《动作/效果》
63.根据第2实施方式,第2通信装置170能够从多个信道中选择应该接收状态信号的信道。在此,对在多个船舶100并列行驶的状况下预先由信道设定部703将各个船舶100的发送信道设定为彼此不同的信道的情况进行说明。在该情况下,一艘船舶100的驾驶员操作第2通信装置170并切换接收信道,由此能够识别附近的其他船舶100的状态信息。
64.由此,驾驶员例如在指挥多艘船舶100航行等情况下,能够容易确认其他船舶100的信息。
65.<第3实施方式>
66.根据第1实施方式所涉及的状态监视系统,船舶100由操舵控制装置154操纵船舶。相对于此,根据第3实施方式的状态监视系统,能够通过操作第2通信装置170而操纵船舶100。并且,根据第3实施方式的状态监视系统,能够通过操作第2通信装置170而参考过去履历,并沿着相同的航线操纵船舶。航行履历是航线候选的一例。
67.《船舶的结构》
68.图5是表示第3实施方式所涉及的船舶的结构的概略图。
69.第3实施方式所涉及的船舶100除了第1实施方式的结构以外,还具备控制装置118及测位装置132。
70.控制装置118按照经由第1通信装置131从第2通信装置170接收到的指示而控制主发动机113及操舵机115。
71.测位装置132根据gnss(global navigation satellite system:全球导航卫星系统)信号来测定船舶100的位置。
72.《第2通信装置的结构》
73.图6是表示第3实施方式所涉及的第2通信装置的运算装置的结构的概略框图。
74.第3实施方式所涉及的运算装置171除了第1实施方式的结构以外,还具备位置确定部705、航行履历记录部706、航行履历存储部707及控制指示部708。
75.位置确定部705从测位装置132获取船舶100的位置信息。
76.航行履历记录部706根据信号接收部701接收到的状态信息及位置确定部705确定的位置信息来确定船舶100的航行履历,并将该航行履历记录于航行履历存储部707。航行履历由位置信息及主发动机113的转速的时序来表示。具体而言,航行履历记录部706根据所接收到的状态信息所示的主发动机113的转速来确定主发动机113的驱动开始时刻及驱动结束时刻,并按时序确定从驱动开始时刻至驱动结束时刻的位置信息及主发动机113的转速,由此确定航行履历。
77.控制指示部708根据从航行履历存储部707存储的多个航行履历中选择的一个航行履历,生成控制操舵机115的舵角及主发动机113的转速的控制信号,并发送到第1通信装置131。具体而言,控制指示部708按以下顺序生成控制信号。控制指示部708按时间顺序读取所选择的航行履历,并确定最近的目标位置。控制指示部708在所选择的航行履历中,将与所确定的目标位置建立关联的主发动机113的转速确定为目标转速。控制指示部708根据位置确定部705确定的位置信息与目标位置的偏差量来确定目标舵角。目标舵角的确定例如通过自动巡航功能而实现。控制指示部708生成表示所确定的目标转速及目标舵角的控制信号。
78.《航行履历的确定方法》
79.图7是表示第3实施方式所涉及的航行履历的确定方法的流程图。
80.信号接收部701接收状态信号,若位置确定部705获取位置信息(步骤s101),则航行履历记录部706参考包括在状态信息中的主发动机113的转速,判定主发动机113是否驱动(步骤s102)。例如,在主发动机113的转速为规定阈值以上的情况下,航行履历记录部706判定为主发动机113驱动。航行履历记录部706在判定为主发动机113未驱动的情况下(步骤s102:“否”),不记录航行履历而结束处理。
81.另一方面,航行履历记录部706在判定为主发动机113驱动的情况下(步骤s102:“是”),将当前时刻确定为航行开始时刻(步骤s103)。航行履历记录部706将所获取的位置信息及所接收的状态信息中包含的主发动机113的转速记录于内部内存(步骤s104)。
82.在下一个运算周期中,信号接收部701接收状态信号,若位置确定部705获取位置信息(步骤s105),则航行履历记录部706参考状态信息中包含的主发动机113的转速来判定主发动机113是否驱动(步骤s106)。航行履历记录部706在判定为主发动机113驱动的情况下(步骤s106:“是”),返回到步骤s104,并将位置信息及主发动机113的转速保存于内部内存。此时,航行履历记录部706将新的位置信息及主发动机113的转速添加到已保存于内部内存中的位置信息及主发动机113的转速的末尾,由此将位置信息及主发动机113的转速作为时序保存于内部内存。
83.航行履历记录部706在判定为主发动机113未驱动的情况下(步骤s106:“否”),将当前时刻确定为航行结束时刻(步骤s107)。航行履历记录部706将保存于内部内存中的位置信息及主发动机113的转速的时序与在步骤s103中确定的航行开始时刻及在步骤s107中确定的航行结束时刻建立关联,并记录于航行履历存储部707(步骤s108)。
84.每次航行时通过重复执行上述处理,在航行履历存储部707中记录多个航行履历。
85.《自动操纵船舶方法》
86.图8是表示第3实施方式所涉及的自动操纵船舶方法的流程图。
87.若由利用者启动第2通信装置170的自动操纵船舶功能,则显示控制部702从航行履历存储部707读取多个航行履历(步骤s201)。生成包括航行履历列表的航行履历选择画面,并输出到触摸面板172(步骤s202)。在航行履历选择画面上,例如与航行开始时刻及航行结束时刻建立关联并重叠于地图绘制航线。驾驶员从航行履历选择画面选择一条航线,并输入到触摸面板172。
88.控制指示部708根据对触摸面板172的输入,读取从航行履历存储部707所存储的多个航行履历中选择的航行履历(步骤s203)。控制指示部708将与航行履历的最初时刻有关的位置信息确定为目标位置(步骤s204)。位置确定部705从测位装置132获取表示当前位置的位置信息(步骤s205)。控制指示部708判定在步骤s204中确定的目标位置与在步骤s205中获取的当前位置之差是否在规定距离内(步骤s206)。
89.在目标位置与当前位置之差不在规定距离内的情况下(步骤s206“否”),控制指示部708根据目标位置与当前位置来确定目标舵角(步骤s207)。并且,控制指示部708将与航行信息中的目标位置建立关联的主发动机113的转速确定为目标转速(步骤s208)。控制指示部708根据所确定的目标舵角及目标转速生成控制指示信号,并发送到第1通信装置131(步骤s209)。第1通信装置131将控制指示信号输出到控制装置118,由此控制装置118控制
主发动机113及操舵机115。然后,第2通信装置170返回到步骤s205的处理,并根据目标位置生成控制指示信号。
90.在步骤s206中,在目标位置与当前位置之差在规定距离内的情况下(步骤s206“是”),控制指示部708判定当前目标位置是否为与航行信息的最后时刻相关的位置信息(步骤s210)。在当前目标位置不是与航行信息的最后时刻相关的位置信息的情况下(步骤s210“否”),控制指示部708将目标位置变更为下一个位置信息所示的位置(步骤s211)。然后,返回到步骤s205的处理,并根据新的目标位置生成控制指示信号。
91.在步骤s210中,在当前目标位置是与航行信息的最后时刻相关的位置信息的情况下(步骤s210“是”),由于到达了目的地,因此第2通信装置170结束自动操纵船舶处理。
92.《动作/效果》
93.如此,根据第3实施方式所涉及的状态监视系统,第2通信装置170发送指示控制主发动机113及操舵机115的控制指示信号,第1通信装置131接收控制指示信号并输出到控制装置118。由此,驾驶员通过从充电装置153移除第2通信装置170,能够在船体外的任意场所进行操纵船舶操作。
94.并且,第2通信装置170接受船舶100的航线及主发动机113的转速的时序即航行履历的输入,并发送用于按照所输入的航行履历航行的控制指示信号。由此,第2通信装置170能够使船舶100按照过去航线及主发动机113的驾驶模式航行。尤其,通过与操舵履历无关地根据位置信息履历控制操舵,在与航行履历相关的航行时间和潮汐流不同的情况下,也能够适当地使船舶100航行。另外,在第3实施方式中,在控制指示部708中根据目标位置和位置信息来确定舵角,但是并不限定于此。例如,在控制装置118具有自动巡航功能的情况下,控制指示部708发送目标位置,控制装置118可以根据目标位置来确定舵角。并且,在另一实施方式中,第2通信装置170也可以接受手动操纵船舶的输入,而不是接受自动操纵船舶的输入。
95.并且,第2通信装置170根据在主发动机113的驱动开始时刻至驱动结束时刻之间测量的位置信息来确定航行履历,并通过选择航行履历而接受船舶100的航线的输入。由此,第2通信装置170能够不使驾驶员意识到航行履历的记录而记录航行履历。另外,在另一实施方式中,第2通信装置170可以接受航行开始及航行结束的输入,并根据在该航行开始至航行结束之间测量的位置信息来确定航行履历。
96.另外,第3实施方式所涉及的状态监视系统将一个船舶100作为对象进行操纵船舶操作,但是并不限定于此。例如,在另一实施方式中,状态监视系统除了第3实施方式所涉及的操纵船舶功能以外,还具有第2实施方式所涉及的信道的选择功能,因此可以由一个第2通信装置170操纵多艘船舶。
97.<其他实施方式>
98.以上,参考附图对一实施方式进行了详细说明,但是具体结构并不限定于上述结构,而可以进行各种设计变更等。例如,在另一实施方式中,也可以适当地变更上述处理顺序。并且,一部分处理也可以并行执行。
99.另一实施方式所涉及的第2通信装置170沿着窗口152除了具备充电装置153以外或者代替充电装置153,还可以具备中继装置。在该情况下,第2通信装置170通过经由中继装置接收第1通信装置131发送的状态信号,在远离窗口152的位置上也能够显示船舶100的
状态。并且,在另一实施方式中,中继装置可以设置于船体110内(例如机舱)。由此,驾驶员在船体内也能够使用第2通信装置170显示船舶100的状态。
100.在另一实施方式中,状态监视系统可以具备两个以上的第2通信装置170。然而,如第3实施方式在使用了第2通信装置170的操纵船舶的情况下,需要将可实施操纵船舶功能的第2通信装置170确定为一台。
101.<计算机结构>
102.图9是表示至少一个实施方式所涉及的计算机的结构的概略框图。
103.计算机900具备处理器901、主内存902、存储器903及接口904。
104.上述运算装置171及控制装置118安装于计算机900。而且,上述各处理部的动作以程序的形式存储于存储器903。处理器901从存储器903读取程序并扩展到主内存902,并且按照该程序执行上述处理。并且,处理器901按照程序在主内存902中确保与上述各存储部对应的存储区域。作为处理器901的例子,可例举cpu(central processing unit:中央处理器)、gpu(graphic processing unit:图形处理单元)、微处理器等。
105.程序可以用于实现计算机900发挥的一部分功能。例如,程序可以通过与已存储于存储器中的其他程序的组合、或者与安装于其他装置中的其他程序的组合而发挥功能。另外,在另一实施方式中,计算机900除了具备上述结构以外或者代替上述结构,还可以具备pld(programmable logic device:可编程逻辑器件)等自定义lsi(large scale integrated circuit:大规模集成电路)。作为pld的例子,可例举pal(programmable array logic:可编程阵列逻辑)、gal(generic array logic:通用阵列逻辑)、cpld(complex progra mmable logic device:复杂可编程逻辑器件)、fpga(field programmable gate array:现场可编程门阵列)。在该情况下,由处理器901实现的功能的一部分或全部,可以通过该集成电路来实现。这种集成电路也包括在处理器的一例中。
106.作为存储器903的例子,可例举hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态驱动器)、磁盘、光盘、cd
‑
rom(compact di sc read only memory:只读光盘存储器)、dvd
‑
rom(digital versatile dis c read only memory:数字多功能光盘只读存储器)、半导体内存等。存储器903可以是直接连接到计算机900的总线的内部介质,也可以是经由接口904或通信线路连接于计算机900的外部介质。并且,在该程序通过通信线路被分配到计算机900的情况下,接受分配的计算机900可以将该程序扩展到主内存902,并执行上述处理。在至少一个实施方式中,存储器903是非临时性有形存储介质。
107.并且,该程序可以用于实现前述功能的一部分。此外,该程序可以是通过将前述功能与已存储于存储器903中的其他程序组合而实现的所谓的差分文件(差分程序)。
108.产业上的可利用性
109.上述状态监视系统能够在船体外的任意场所监视驾驶状况。
110.符号说明
111.100
‑
船舶,110
‑
船体,111
‑
螺旋桨,112
‑
舵,113
‑
主发动机,114
‑
旋转传感器,115
‑
操舵机,116
‑
舵角传感器,117
‑
信号处理装置,118
‑
控制装置,130
‑
甲板,131
‑
第1通信装置,132
‑
测位装置,150
‑
上部结构体,151
‑
操舵室,152
‑
窗口,153
‑
充电装置,154
‑
操舵控制装置,170
‑
第2通信装置,173
‑
二次电池,171
‑
运算装置,172
‑
触摸面板,701
‑
信号接收部,702
‑
显示控制部,703
‑
信道设定部,704
‑
信道选择部,705
‑
位置确定部,706
‑
航行履历记录部,
707
‑
航行履历存储部,708
‑
控制指示部,900
‑
计算机,901
‑
处理器,902
‑
主内存,903
‑
存储器,904
‑
接口。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。