1.本发明属于巷道掘进机械技术领域,更具体涉及一种单轨四臂锚杆台车。
背景技术:
2.锚杆支护的施工程序包括打孔、输送锚固剂、搅拌锚固剂、安装锚杆锚索、对锚杆进行张拉预紧等,流程繁琐,人工依赖程度高,因此,出现了锚杆台车,又,作业时各类地面行走式设备需要反复错车,造成巷道空顶,为了节省错车时间,减少安全隐患,市场上陆续有悬轨钻锚设备开始试用,但这类悬轨钻锚设备通常所装载的凿岩钻机或锚杆钻机数量较少(一套或二套),并且钻臂不够灵活、作业效率不高。
3.例如公开号为cn111663896a的专利提供了一种煤矿用单轨吊四臂液压支护锚杆锚索钻机,包括悬轨、主平台、动力平台、驱动总成、组合式支护平台、工作平台、锚杆钻机总成和凿岩钻机总成;悬轨设置于巷道的顶部,主平台、动力平台和驱动总成连接于悬轨的底部,驱动总成带动主平台、动力平台沿着悬轨移动;组合式支护平台位于主平台的首端,支护主平台首端的巷道顶部;所述伸缩臂设置于所述工作平台的首端,所述伸缩臂通过伸缩油缸与所述工作平台连接,所述伸缩油缸控制所述伸缩臂的伸缩,所述平台主体外伸臂架设置于所述工作平台的首端,所述伸缩臂通过导向机构与所述平台主体外伸臂架连接,所述操作平台设置于所述伸缩臂的首端顶部。
4.现有技术中,锚杆台车通常设置有左右两组伸缩臂,伸缩臂上再安装锚杆机和工作平台,因此锚杆机前后伸缩时,必须保证两组伸缩臂同步,不然会引起两个站人平台的相对运动,发生伤人事故,即,四个臂的锚杆机基本是同步向前支护,不能相互独立进行支护;同时,一组一般设置两个伸缩臂,且两个伸缩臂的间距较小,导致锚杆机收回时,摇臂必须外摆一定角度以让出锚杆机回转空间,从而增加了整机在进行帮锚杆支护的巷道宽度要求;此外,锚杆机施工外侧帮部不便,难以进行底板帮锚杆的施工。
技术实现要素:
5.本公开针对现有技术中,四臂锚杆台车的站人平台、伸缩臂等结构设置不够合理,导致四个臂的锚杆机不能相互独立进行支护,不够灵活,施工外侧帮部不便、难以进行底板帮锚杆的施工的问题,提供一种单轨四臂锚杆台车。
6.本公开的构思之一在于,提供一种单轨四臂锚杆台车,在行走状态时整个工作机构部被吊起,钻臂装置、支护装置等全部收缩,此时仅占用巷道顶部空间,不会影响地面其他施工设备的进出,解决了现有地面设备移动不灵活和错车难等问题,而转入工作状态时,工作机构部在第一升降机构的带动下下降至工作位置。
7.本公开的另一构思在于,锚杆台车设置有内侧伸缩臂和两个外侧伸缩臂,相比现有仅设置双锚杆机的结构,本公开可安装四台锚杆机,增加了可安装锚杆机的数量,大大提高了锚杆台车的工作效率。
8.本公开的另一构思在于,锚杆台车包括工作平台,该工作平台包括内侧伸缩框架
和外侧伸缩框架,内侧伸缩框架用于安装内侧伸缩臂,外侧伸缩框架用于安装外侧伸缩臂。
9.本公开的另一构思在于,通过在内侧伸缩臂设置副平台,使得副平台可随内侧伸缩臂的伸缩前后平移,施工人员站在副平台上,能随锚杆机一同伸出,操作视野更好,增加施工便捷性。
10.本公开的另一构思在于,锚杆台车还包括支护装置,该支护装置设置在副平台上,使得支护装置活动空间更大,提高了支护装置的灵活性,另一方面,通过在副平台底部增设用于撑地的第二支腿,以提高工作机构部的稳定性。
11.本公开的另一构思在于,工作平台设置有位于工作平台前端的第一支腿,并且优化了第一支腿的结构,使得锚杆机的稳定性更好。
12.本公开的另一构思在于,外侧伸缩臂上安装旋转座,旋转座上设置摆动臂,外侧锚杆机安装在摆动臂上,并且旋转座、摆动臂分别能在两个互相垂直的平面内旋转,外侧锚杆机的灵活程度更高,能够适应不同的巷道环境,同时,外侧伸缩臂能够很好的收缩,避免误触碰。
13.本公开的另一构思在于,旋转座连接可升降的载人平台,非使用状态下,载人平台自由垂落,缩小整体体积,同时,载人平台调节方向较多,灵活性好,方便操作人员上下。
14.本公开的另一构思在于,旋转座上连接有铰接架,铰接架用于安装载人平台,在载人平台上设置第一锁孔,在安装载人平台的铰接架上设置第二锁孔,当载人平台处于水平状态时,第一锁孔、第二锁孔处于对齐状态,此时在第一锁孔、第二锁孔间插上锁销以锁定载人平台,解决了现有技术中,使载人平台保持水平状态的机构结构复杂的问题,锁定机构结构简单,成本低,并且稳定可靠。
15.本公开的另一构思在于,摆动臂内设置有滑轨、传动机构与滑动座,滑动座用于安装外侧锚杆机,滑动座在传动机构的带动下沿滑轨滑动,带动外侧锚杆机运动以实现扩大锚杆机行程的效果。
16.本公开的另一构思在于,传动机构设置为油缸与链条,油缸安装在摆动臂的底部,链条设置在油缸上,油缸伸缩能带动链条整体发生位移,又,链条分别与架体、滑动座有连接关系,链条整体位移时将发生转动,从而带动滑动座沿滑轨滑动。
17.本公开的另一构思在于,内侧锚杆机通过连接座安装在内侧伸缩臂,连接座能上下旋转,使的锚杆台车行走时,第二支腿能够水平向前,内侧锚杆机则水平向后折叠,结构简单,零部件小,且折叠后整个工作机构部的收缩体积较小。
18.本公开提供一种单轨四臂锚杆台车,其包括吊轨、动力部、驱动小车、承载小车、第一升降机构、工作机构部,其中所述工作机构部包括工作平台,和安装在工作平台上的钻臂装置、支护装置;
19.所述吊轨安装在巷道顶部,所述动力部、驱动小车、承载小车均安装在所述吊轨上,所述动力部内安装有液压泵站及电气系统,所述承载小车在驱动小车的带动下沿吊轨行走,所述工作平台通过第一升降机构与承载小车相连接,并且所述第一升降机构带动所述工作平台升降。
20.在一些实施例中,所述工作平台上设置有伸缩臂和伸缩框架,所述伸缩臂包括内侧伸缩臂和两个外侧伸缩臂,所述伸缩框架包括内侧伸缩框架和外侧伸缩框架;
21.所述内侧伸缩框架用于安装所述内侧伸缩臂,所述外侧伸缩框架用于安装所述外
侧伸缩臂。
22.首先,本技术方案可安装四个锚杆机,大大提高了锚杆钻机的工作效率。其次,现有技术中,锚杆台车的四个锚杆机多为同步向前支护,不能相互独立进行支护,本技术将内侧伸缩臂与外侧伸缩臂相互独立设置、互不影响,两个外侧伸缩臂在进行帮部锚杆支护时,内侧伸缩臂可以向前支护锚索或者前一排中部锚杆,大大提高了使用便捷性,满足更多使用需求。
23.进一步的,所述内侧伸缩臂连接有副平台,所述副平台可随内侧伸缩臂伸缩移动,副平台作为站人平台,使得施工人员操作时视野更好,提高了工作效率,满足更多使用需求。
24.在一些实施方式中,所述锚杆台车还包括支护装置,所述支护装置与副平台连接,该支护装置设置在副平台上,可随内侧伸缩臂前后移动,使得支护装置活动空间更大,提高了支护装置的灵活性。
25.进一步的,通过在副平台底部增设用于撑地的第二支腿,能提高工作机构部的稳定性。
26.在一些实施方式中,所述副平台外边缘设置有凸起,使得副平台内可以放置防滑垫等工具,进而使得操作人员站在副平台内的安全性更好、更方便。
27.在一些实施例中,所述外侧锚杆机通过以下结构安装在外侧伸缩臂上:
28.旋转座,安装在外侧伸缩臂上,旋转座绕外侧伸缩臂在平面一内可旋转;
29.摆动臂,安装在旋转座上,摆动臂绕旋转座在平面二内可旋转;平面一与平面二垂直;摆动臂上设置有滑轨;
30.滑动座,安装在摆动臂上并可沿着滑轨移动;
31.安装座,用于安装外侧锚杆机,安装在滑动座上并相对于滑动座在平面三内可旋转。
32.进一步的,所述的旋转座通过第一转轴与外侧伸缩臂连接,所述的第一转轴的轴向与外侧伸缩臂的长度方向相互平行。
33.具体的,所述的旋转座安装在外侧伸缩臂上,所述的第一转轴的轴向与外侧伸缩臂的长度方向相互平行。显然的,第一转轴是垂直于平面一的。
34.在本技术中外侧伸缩臂的长度方向,即为锚杆台车在巷道内移动的前进或后退的方向。伸缩臂工作,能够带动旋转座、外侧锚杆机向前移动,配合外侧锚杆机工作。非工作状态,伸缩臂又能够带动旋转座、外侧锚杆机回退,减小整个产品的体积。
35.旋转座的设置,使得外侧锚杆机在垂直于伸缩臂的竖直面上,可旋转调节角度,即在巷道宽度范围内,可以调节外侧锚杆机的角度,进行巷道正顶面、侧顶面位置的选择。
36.在本技术的一些实施例中,所述的摆动臂背侧面通过第二转轴与旋转座连接,所述的第二转轴与摆动臂异面垂直。也就是说,第二转轴平行于平面一,随着旋转座的旋转,本技术中的平面二是在变化的。摆动臂绕第二转轴旋转,则能够调节外侧锚杆机向前或向后旋转。此处的前后是指锚杆台车的前进方向为前,锚杆台车的后退方向为后。
37.在本技术的一些实施例中,所述的滑轨与第二转轴设置在摆动臂的两个相背侧面。使得摆动臂的旋转与滑动座的移动能够相互不干扰,也就满足了两个动作同时进行的前提条件,能够快速将外侧锚杆机调节到预定的位置。
38.在本技术的一些实施例中,所述的滑轨沿着摆动臂的长度方向设置,滑动座安装在滑轨上,在动力装置的驱动下滑动座能够沿着滑轨来回移动。
39.摆动臂上滑轨与滑动座的设置,辅助外侧锚杆机的向外伸长。在非工作状态下又能够将外侧锚杆机收缩回来。优选的,外侧锚杆机的长度与摆动臂的长度相适应。在外侧锚杆机收缩后能够与摆动臂保持差不多齐平的状态,所占的空间较小。
40.在本技术的一些实施例中,所述的旋转座上还安装有载人平台,所述的载人平台通过第二升降机构与旋转座连接。
41.具体的,所述的外侧伸缩臂连接有安装架,所述的安装架的一侧面与第二升降机构、外侧伸缩臂连接,安装架的另一侧面旋转座连接。
42.在本技术的一些实施例中,所述的第二升降机构包括连杆与铰接架,所述的铰接架设置在载人平台的一侧,且铰接架相对于载人平台可旋转。具体的,载人平台运动至水平状态,此时即为载人平台工作状态,操作人员能够站立到载人平台上。或者载人平台竖直垂落,此时载人平台处于收缩状态,锚杆台车的体积较小。
43.在本技术的一些实施例中,所述的连杆为弯折的l形结构,所述的连杆的一端与安装架连接,连杆相对于安装架可旋转。具体的说,连杆与安装架的连接位置位于安装架的下部且靠近内侧锚杆机的一边角处。当铰接架位于低位时,与安装架连接的一端连杆处于竖直状态,与铰接架连接的一端连杆处于水平状态。操作人员此时能够轻易的站到载人平台上,连杆向上旋转,带动载人平台向上移动。
44.直到连杆旋转到极限位置,即与安装架连接的一端连杆处于水平状态,与铰接架连接的一端连杆处于竖直状态,铰接架到达最高位置,即载人平台到达最高位置。此时的连杆所占的空间最小,近乎贴合在旋转座外侧。在不需要使用载人平台时,载人平台相对于铰接架向下翻折,使得载人平台处于竖直状态并位于连杆外侧。此时的载人平台处于收缩状态,整体体积较小。
45.所述的动力装置包括第二动力缸,所述的第二动力缸安装在安装架的一侧面,第二动力缸通过扭转臂连接连杆。第二动力缸工作带动扭转臂转动,而转动的扭转臂又带动连杆旋转。
46.在一些实施例中,所述摆动臂包括架体、传动机构与滑动座,所述架体上设置有竖直的滑轨,所述滑动座用于安装外侧锚杆机,滑动座在传动机构的带动下沿滑轨滑动,带动外侧锚杆机运动,能扩大锚杆机的行程,使锚杆机调整工作角度与位置更容易。
47.在一些实施例中,所述载人平台的两侧设置有两个第一锁孔;
48.所述载人平台安装在所述铰接架上,载人平台能沿铰接架转动,所述铰接架上设置有两个与第一锁孔匹配的第二锁孔,载人平台处于水平状态时,所述第一锁孔、第二锁孔位于同一水平直线;
49.锁销,锁销水平设置,用于插入第一锁孔、第二锁孔,使所述载人平台保持水平状态;
50.链条,所述链条一端连接在锁销上,另一端固定在铰接架上,所述链条设置有调节部,通过控制所述调节部,能使链条带动锁销运动。
51.进一步的,通过控制所述调节部,能使链条带动锁销向内运动,从而使锁销滑出外侧的第一锁孔或第二锁孔,或,使链条向外挤压锁销,从而使锁销插入第一锁孔或第二锁
孔。
52.在一些实施例中,所述第一锁孔设置在所述第二锁孔的外侧。通过控制所述调节部,使链条带动锁销向内运动时,锁销脱出第一锁孔,但仍处于第二锁孔内。
53.本公开提供的锚杆台车相比较现有技术,取得了以下有益技术效果:
54.1、相比较现有技术中,在锚杆机前端安装左右摇臂使得锚杆机钻箱与迎头的距离增加,使其空顶距达到700mm以上,本技术锚杆机直接与迎头接触,缩短了锚杆机与迎头的距离。
55.2、设置了副平台、两侧的载人平台,施工人员站位更灵活,施工时视野更好,并且载人平台可以实现上下升降,施工人员可借助外侧的载人平台登上副平台。
56.3、相比现有技术中,多个锚杆机只能同步支护,本技术的内侧锚杆机与外侧锚杆机能够独立操纵,外侧锚杆机在进行帮部锚杆支护时,内侧锚杆机可以向前支护锚索或者前一排中部锚杆。
57.4、本技术,外侧锚杆机活动方向灵活,并且设置了摆动臂、滑动座,可实现水平帮部锚杆支护,并且锚杆机施工外侧帮部较灵便,且钻孔角度调整方便。
58.5、现有的锚杆台车难以实现底板帮锚杆的施工,而本技术,摆动臂上安装有滑动座,摆动臂可以旋转180
°
后,控制滑动座将锚杆机放置最低位,实现底板帮锚杆的施工,同时,载人平台可降至最低位置,保证施工人员的视野。
附图说明
59.以下将结合附图和优选实施例来对本公开进行进一步详细描述,但是本领域技术人员将领会的是,这些附图仅是出于解释优选实施例的目的而绘制的,并且因此不应当作为对本公开范围的限制。此外,除非特别指出,附图仅示意在概念性地表示所描述对象的组成或构造并可能包含夸张性显示,并且附图也并非一定按比例绘制。
60.图1:本公开提供的一种单轨四臂锚杆台车的工作机构部的结构示意图;
61.图2:图1中的工作平台的结构示意图;
62.图3:本公开提供的一种单轨四臂锚杆台车的工作机构部的局部结构示意图。
63.图4:本公开所提供的第一支腿的结构示意图;
64.图5:本公开所提供的锚杆台车的结构示意图;
65.图6:外钻臂的第一结构示意图;
66.图7:本公开提供的一种单轨四臂锚杆台车的工作机构部的另一局部结构示意图。
67.图8:本公开提供的一种外侧锚杆机的摆动臂的结构示意图;
68.图9:本公开提供的一种外侧锚杆机的摆动臂的另一结构示意图;
69.图10:本公开提供的一种外侧锚杆机的摆动臂的局部结构示意图;
70.图11:图10的a
‑
a方向剖面示意图;
71.图12:图10的b
‑
b方向剖面示意图;
72.图13:图10的c
‑
c方向剖面示意图;
73.图14:本公开提供的一种外侧锚杆机的摆动臂的另一局部结构示意图;
74.图15:本公开提供的一种外侧锚杆机的摆动臂的局部剖面示意图;
75.图16:本公开提供的一种载人平台的锁定机构的结构示意图;
76.图17:本公开提供的一种载人平台的锁定机构的另一角度的结构示意图;
77.图18:本公开提供的一种载人平台的锁定机构的又一角度的结构示意图;
78.图19:本公开提供的一种载人平台的锁定机构d
‑
d方向的剖面示意图;
79.图20:本公开提供的一种载人平台的锁定机构在载人平台自然下落时的结构示意图;
80.图21:本公开提供的一种载人平台的锁定机构在载人平台自然下落时的另一角度的结构示意图;
81.图22:本公开提供的一种单轨四臂锚杆台车的第一结构示意图;
82.图23:本公开提供的一种单轨四臂锚杆台车的第二结构示意图;
83.图24:本公开提供的一种单轨四臂锚杆台车的第三结构示意图;
84.图25:本公开提供的一种单轨四臂锚杆台车的第四结构示意图;
85.其中,1、旋转座;2、摆动臂;4、安装座;5、外侧锚杆机;6、外侧伸缩臂;10、滑轨;
86.03、锁销;04、第一链条;05、插销;011、第二锁孔;021、第一锁孔;041、调节部;014、动力缸;016、连杆;017、铰接架;
87.11、支撑架;12、支脚;13、l形支架;14、载人平台;15、工作平台;16、第三支腿;17、第二支腿;
88.21、内侧伸缩臂;22、内侧锚杆机;23、连接座;28、副平台;
89.41、架体;411、第二固定件;42、滑动座;421、第一固定件;43、油缸;431、第一定滑轮;432、第二定滑轮;44、第二链条;45、调节机构。
具体实施方式
90.下面结合附图,对本公开作详细的说明。
91.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本公开进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本公开,并不用于限定本公开。
92.实施例一:一种单轨四臂锚杆台车的工作机构部,详细描述如下:
93.如图1
‑
3所示,工作机构部包括工作平台15,工作平台15上设置有伸缩臂和伸缩框架,伸缩臂包括内侧伸缩臂21和两个外侧伸缩臂6,通过设置两个灵活的外侧伸缩臂来提高锚杆钻机的工作效率,伸缩框架包括内侧伸缩框架和外侧伸缩框架;
94.进一步的,内侧伸缩框架用于安装并控制内侧伸缩臂21,外侧伸缩框架用于安装并控制外侧伸缩臂6,使得各个伸缩臂相互独立、互不影响。
95.作为改进的,内侧伸缩框架或内侧伸缩臂21可以为一体式结构,内侧的两个锚杆机实现同步支护,且,内侧伸缩臂21与外侧伸缩臂6相互独立设置、互不影响。
96.进一步的,内侧伸缩臂21连接有副平台28,使得副平台28随内侧伸缩臂21可伸缩移动,提高装置灵活性。
97.更进一步的,副平台28为站人平台,增加操作视野和工作空间。
98.锚杆台车还包括支护装置,支护装置与副平台28连接,提高支护装置的灵活性。
99.进一步的,副平台28底部设置有支杆结构的第二支腿17,第二支腿17用于支撑副平台28,提高副平台28及支护装置的稳定性,第二支腿17与副平台28旋转连接,当锚杆台车
在吊轨上行进时,可以将第二支腿17收纳,减小体积,提高灵活性。
100.进一步的,副平台28外边缘设置有凸起,使得副平台28内可以放置防滑垫等工具,进而使得操作人员站在副平台28内的安全性更好、更方便。
101.内侧伸缩臂21连接有副平台28,内侧伸缩臂21与外侧伸缩臂6独立设置,使得副平台28可伸缩移动,通过副平台28与支护装置连接,使得锚杆台车无需前进,只需要控制内侧伸缩臂21带动副平台28伸缩,使得操作人员与支护装置前进,提高了支护装置的灵活性和锚杆台车的工作效率,并且,当副平台28移动至合适位置时,通过底部第二支腿17支撑,大大提高了作业时工作机构部的稳定性。
102.在一些实施例中,工作平台15上还设置有主平台,主平台相对于工作平台15的架体41不能移动,作为优选的,施工人员能够站在主平台操纵整个锚杆台车,或,能够遥控操作。
103.实施例二:一种支腿,详细描述如下:
104.如图2、4、5所示,锚杆台车上安装有第一支腿:第一支腿包括支撑架11与设置在支撑架11两侧的支脚12,相对于单根支杆结构,显然支撑架11的结构强度更高;相比较于支杆与地面的单点接触,本技术支撑架11与底面接触的面积更大,稳定性更好。所述的支脚12与支撑架11连接,且支脚12相对于支撑架11可旋转,通过支脚12进一步加强整个第一支腿与底面的接触面积,提高第一支腿在支撑时的稳定性。而且支脚12相对于支撑架11可旋转,在不同的使用需求下,支脚12能够旋转到不同的角度,比如支脚12收缩,则仅由支撑架11支撑;比如支脚12与支撑架11同高度,则支撑架11与支脚12共同支撑;比如支脚12下旋则仅由支撑架11进行支撑。所述的支脚12与支撑架11位于同一平面上。在本技术用于支撑时,其是一个线支撑,现对于单根支杆的点支撑,本技术的支撑效果更好、稳定性更强。而且,锚杆机的工作环境并不是在平整的地面上,地面多是凹凸不平的。那么,中间支脚12若采用面支撑,又存在难以与工作环境适应的问题。因此,本技术具有高结构强度、高支撑稳定性。
105.基于上述实施例,提供另一种实施例,所述的支撑架11为框架结构。采用框架结构的支撑架11的结构强度较好。优选的,所述的支撑架11为矩形框架结构。具体的说,支撑架11可以由管材一体弯折构成;支撑架11也可以由四根管材连接构成。
106.基于上述实施例,提供另一种实施例,所述的支脚12与支撑架11之间设置有驱动装置,所述的驱动装置工作可以带动支脚12相对于支撑架11进行旋转。具体的,所述的驱动装置为动力缸014。
107.基于上述实施例,提供另一种实施例,所述的支撑架11的两侧设置有倒置的l形支架13,l形支架13固定在支撑架11的侧壁。所述的支脚12通过l形支架13与支撑架11连接。具体的,支脚12为长条形杆状结构,所述的支脚12的第一端通过转轴与l形支架13底部连接,支脚12绕转轴可旋转。
108.所述的驱动装置通过l形支架13与支撑架11连接。具体的,动力缸014的缸体与l形支架13的顶部连接,动力缸014的动力杆与支脚12第二端转动连接。动力缸014工作会伸长或缩短动力杆,从而带动支脚12绕转轴旋转。
109.基于上述实施例,提供另一种实施例,所述支脚12的第二端向上弯曲。在动力缸014驱动支脚12向下旋转时,支脚12的第二端会成为锚杆机的支撑部位。因此设置支脚12的第二端向上弯曲,在支脚12下旋后,支脚12能够能保持与地面较大面积的接触。
110.工作平台15,包括工作平台15架体41,所述的工作平台15架体41上依次安装有第三支腿16、第一支腿与第二支腿17。具体的,所述的第三支腿16与第二支腿17为支杆结构。
111.基于上述实施例,提供另一种实施例,所述的第一支腿与工作平台15架体41连接,且第一支腿相对于工作平台15架体41可旋转。具体的,设置有动力装置,动力装置驱动第一支腿旋转,实现本技术的支撑或收纳。在锚杆机移动过程中,是不需要与底面接触支撑的,此时为了避免第一支腿与地面碰撞,就会驱动第一支腿旋转,对第一支腿进行收纳。
112.所述的第二支腿17或第三支腿16与工作平台15架体41连接,且第二支腿17或第三支腿16相对于工作平台15架体41可旋转。同样道理,动力装置驱动第二支腿17或第三支腿16旋转,实现本技术的支撑或收纳。在锚杆机移动过程中,是不需要与底面接触支撑的,此时为了避免第二支腿17或第三支腿16与地面碰撞,就会驱动第二支腿17或第三支腿16旋转,对第二支腿17或第三支腿16进行收纳。
113.实施例三:一种外侧锚杆机的安装方式:
114.如图1、图3、图6、图7所示,锚杆台车包括:
115.旋转座1,安装在外侧伸缩臂6上,旋转座1绕外侧伸缩臂6在平面一内可旋转;
116.摆动臂2,安装在旋转座1上,摆动臂2绕旋转座1在平面二内可旋转;平面一与平面二垂直;摆动臂2上设置有滑轨10;
117.滑动座3,安装在摆动臂2上并可沿着滑轨10移动;
118.安装座4,用于安装外侧锚杆机5,安装在滑动座3上并相对于滑动座3在平面三内可旋转。
119.进一步的,所述的旋转座1通过第一转轴与外侧伸缩臂6连接,所述的第一转轴的轴向与外侧伸缩臂6的长度方向相互平行。
120.具体的,所述的旋转座1安装在外侧伸缩臂6上,所述的第一转轴的轴向与外侧伸缩臂6的长度方向相互平行。显然的,第一转轴是垂直于平面一的。
121.在本技术中外侧伸缩臂6的长度方向,即为锚杆台车在巷道内移动的前进或后退的方向。伸缩臂工作,能够带动旋转座1、外侧锚杆机5向前移动,配合外侧锚杆机5工作。非工作状态,伸缩臂又能够带动旋转座1、外侧锚杆机5回退,减小整个产品的体积。
122.旋转座1的设置,使得外侧锚杆机5在垂直于伸缩臂的竖直面上,可旋转调节角度,即在巷道宽度范围内,可以调节外侧锚杆机5的角度,进行巷道正顶面、侧顶面位置的选择。
123.进一步的,所述的摆动臂2背侧面通过第二转轴与旋转座1连接,所述的第二转轴与摆动臂2异面垂直。也就是说,第二转轴平行于平面一,随着旋转座1的旋转,本技术中的平面二是在变化的。摆动臂2绕第二转轴旋转,则能够调节外侧锚杆机5向前或向后旋转。此处的前后是指锚杆台车的前进方向为前,锚杆台车的后退方向为后。
124.进一步的,所述的滑轨10与第二转轴设置在摆动臂2的两个相背侧面。使得摆动臂2的旋转与滑动座3的移动能够相互不干扰,也就满足了两个动作同时进行的前提条件,能够快速将外侧锚杆机5调节到预定的位置。
125.进一步的,所述的滑轨10沿着摆动臂2的长度方向设置,滑动座3安装在滑轨10上,在动力装置的驱动下滑动座3能够沿着滑轨10来回移动。
126.摆动臂2上滑轨10与滑动座3的设置,辅助外侧锚杆机5的向外伸长。在非工作状态下又能够将外侧锚杆机5收缩回来。优选的,外侧锚杆机5的长度与摆动臂2的长度相适应。
在外侧锚杆机5收缩后能够与摆动臂2保持差不多齐平的状态,所占的空间较小。
127.进一步的,所述的旋转座1上还安装有载人平台14,所述的载人平台14通过第二升降机构与旋转座1连接。
128.具体的,所述的外侧伸缩臂6连接有安装架,所述的安装架的一侧面与第二升降机构、外侧伸缩臂6连接,安装架的另一侧面旋转座1连接。
129.进一步的,所述的第二升降机构包括连杆016与铰接架017,所述的铰接架017设置在载人平台14的一侧,且铰接架017相对于载人平台14可旋转。具体的,载人平台14可运动至水平状态,此时即为载人平台14工作状态,操作人员能够站立到载人平台14上;载人平台14向下垂落,竖直位于旋转座1的一侧,此时为载人平台14处于收缩状态,锚杆台车的体积较小。
130.进一步的,所述的连杆016为弯折的l形结构,所述的连杆016的一端与安装架连接,连杆016相对于安装架可旋转。具体的说,连杆016与安装架的连接位置位于安装架的下部且靠近内侧锚杆机22的一边角处。当铰接架017位于低位时,与安装架连接的一端连杆016处于竖直状态,与铰接架017连接的一端连杆016处于水平状态。操作人员此时能够轻易的站到载人平台14上,连杆016向上旋转,带动载人平台14向上移动。
131.直到连杆016旋转到极限位置,即与安装架连接的一端连杆016处于水平状态,与铰接架017连接的一端连杆016处于竖直状态,铰接架017到达最高位置,即载人平台14到达最高位置。此时的连杆016所占的空间最小,近乎贴合在旋转座1外侧。在不需要使用载人平台14时,载人平台14相对于铰接架017向下翻折,使得载人平台14处于竖直状态并位于连杆016外侧。此时的载人平台14处于收缩状态,整体体积较小。
132.实施例四:本公开提供的一种外侧锚杆机的摆动臂:
133.如图8
‑
15所示,包括架体41、传动机构与滑动座42,所述架体41上设置有竖直的滑轨10,所述滑动座42用于安装外侧锚杆机5,滑动座42在传动机构的带动下沿滑轨10滑动,带动外侧锚杆机5运动,用于增加外侧锚杆机5的行程。
134.进一步的,所述传动机构设置为油缸43与第二链条44,油缸43安装在摆动臂2架体41的底部,油缸43上设置有间隔的第一定滑轮431、第二定滑轮432,第二链条44安装在定滑轮上。与带传动相比,链传动预紧力小,所以链传动轴压力小,而传递的功率较大,效率较高,并且链传动还可以在高温、低速、油污等情况下工作;
135.进一步的,油缸43伸缩能带动第二链条44整体发生位移,又,第二链条44分别与摆动臂2的架体41、滑动座42有连接关系,第二链条44整体位移时将发生转动,从而带动滑动座42沿滑轨10滑动。
136.进一步的,第二链条44的第一节点上设置有第一固定件421,第一固定件421与滑动座42相连接;第二链条44的第二节点上设置有第二固定件411,第二固定件411与摆动臂2的架体41相连接,第一节点与第二节点运动方向相反;油缸43处于最短工作长度时,第二节点处于第二链条44的较上端、第一节点处于第二链条44的较下端,滑动座42的可滑动行程较大。
137.进一步的,所述第二链条44设置为滚子链,滚子链结构较简单,易切割,方便安装、替换,并且在滚子链上安装第一固定件421、第二固定件411较简便。
138.进一步的,所述伸缩油缸43上设置有两副单排滚子链,能够增加第二链条44与架
体41、滑动座42之间的连接强度,当一副第二链条44损坏时,另一副能继续维持作业。
139.能够理解的是,所述滚子链可以设置为一副滚子链或多副滚子链,每副滚子链可以设置为单排滚子链,也可以设置为多排滚子链,多排链相当于几个普通的单排链彼此之间用长销轴连接而成,其承载能力与排数成正比,但排数越多,越难使各排受力均匀。设置多副滚子链或使用多排滚子链使第二链条44能承受较大载荷。
140.基于上述实施例的改进,所述油缸43上设置有用于调节第二链条44松紧的调节机构45,所述调节机构45能够使第二链条44保持张紧,防止第二链条44脱出,并且,所述调节机构45能使第二链条44变宽松,便于维护或更换第二链条44。
141.进一步的,所述调节机构45包括调节块与调节螺栓,所述调节块通过所述调节螺栓螺纹连接在油缸43的头部,所述调节螺栓能够调节调节块与伸缩油缸43间的距离。
142.进一步的,在调节块上设置有第一定滑轮431,在伸缩油缸43上设置有第二定滑轮432,第一定滑轮431、第二定滑轮432处于同一垂线。通过旋转调节螺栓能够调节第一定滑轮431与第二定滑轮432间的距离,从而使所述第二链条44张紧或变宽松。
143.相比于现有技术,本公开中的外侧锚杆机工作时的角度和位置更易调节,并且能够扩大机载锚杆钻机的工作范围,提升了作业效率。
144.实施例五:一种载人平台的锁定机构:
145.如图16
‑
21所示,载人平台14和铰接架017上分别设置有连接孔,连接孔内水平装有插销05,插销05将载人平台14安装在铰接架017上,并使载人平台14能相对铰接架017转动。
146.进一步的,所述载人平台14的左侧和右侧设置有两个第一锁孔021,铰接架017上设置有两个与第一锁孔021适配的第二锁孔011,当载人平台14处于水平状态时,第一锁孔021和第二锁孔011处于对齐状态,此时将锁销03插入第一锁孔021、第二锁孔011即可将载人平台14锁定在水平状态。
147.本实施例通过在左右两侧分别设置了一对相匹配的锁孔,使得锁定机构更稳定牢固,有效防止了所述载人平台14向左侧或右侧倾斜,载人平台14的承重能力更好。
148.进一步的,所述锁销03的内侧连接有第一链条04,所述第一链条04一端连接在锁销03上,另一端固定在铰接架017上,解决了现有技术中,使用锁销03配合锁孔的方式锁定载人平台14时,锁销03卸下后可能丢失的问题,能防止锁销03丢失,并且需要锁销03时能立刻取用,使用更方便。
149.进一步的,所述第一链条04的两端直接焊接在锁销03和铰接架017上。
150.进一步的,所述第一链条04设置在两个锁销03的内侧,所述第一链条04所处位置较合理,占用的体积小,并且不会对附近的人或其他机构造成影响。
151.本实施例中,当载人平台14自然下落时,所述第二锁孔011与所述第一锁孔021的位置如图所示,当所述载人平台14调整到水平状态时,所述第一锁孔021绕插销05转动,直至与第二锁孔011对齐,所述锁销03水平插入。
152.进一步的,本实施例中,所述第一锁孔021设置在第二锁孔011的外侧,第一链条04设置有调节部041,调节部041有一定的活动空间。
153.更具体的,将所述调节部041提起时,能带动两侧的锁销03同时滑出第一锁孔021而又不脱出第二锁孔011,此时载人平台14自然下落,变成竖直收纳的状态,节约空间;需要
将载人平台14展开时,先将载人平台14调整水平,使第一锁孔021对齐第二锁孔011,再向下压调节部041,使两侧的锁销03重新插入第一锁孔021,实现锁定。锁销03一直处于第二锁孔011内,相比现有技术每次插入锁销03时需要将锁销03对准锁孔,本公开的锁定机构操作时更简单、方便。
154.能够理解的是,所述第一锁孔021也可以设置在第二锁孔011的内侧,锁销03与第一链条04的结构不变,上拉调节部041时,两侧的锁销03同时滑出第二锁孔011而又不脱出第一锁孔021,载人平台14自然下落,向下压调节部041时,则第一链条04挤压推动两侧的锁销03重新插入第二锁孔011,实现锁定。或,所述第一锁孔021也可以与第二锁孔011交错设置。
155.相比现有技术,本公开提供的一种载人平台的锁定机构,其结构简单、成本低,稳定可靠,操作时更简单、方便,并且能有效防止锁销遗失。
156.实施例六:本公开提供的一种单轨四臂锚杆台车,可以结合前述实施例加以理解。
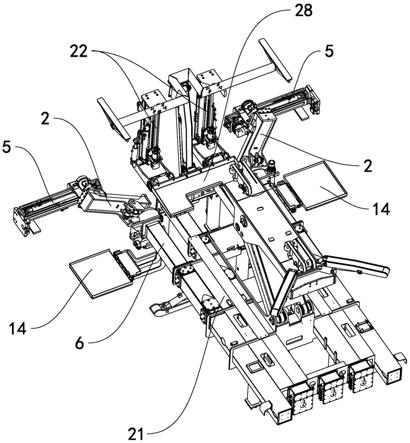
157.如图1
‑
25所示,本公开提供一种单轨四臂锚杆台车,其包括吊轨、动力部、驱动小车、承载小车、第一升降机构、工作机构部,其中所述工作机构部包括工作平台15,和安装在工作平台15上的钻臂装置、支护装置;
158.所述吊轨安装在巷道顶部,所述动力部、驱动小车、承载小车均安装在所述吊轨上,所述动力部内安装有液压泵站及电气系统,所述承载小车在驱动小车的带动下沿吊轨行走,所述工作平台15通过第一升降机构与承载小车相连接,并且所述第一升降机构带动所述工作平台15升降。
159.进一步的,所述钻臂装置包括内侧伸缩臂21与对应的内侧锚杆机22,两个外侧伸缩臂6与对应的外侧锚杆机5。
160.进一步的,所述内侧伸缩臂21、外侧伸缩臂6安装在工作平台15上。
161.进一步的,所述的工作平台15上依次安装有第三支腿16、第一支腿与第二支腿17,并且第二支腿17及副平台28都与内侧伸缩臂21相连接,能随内侧伸缩臂21前后平移;第一支腿的结构经过优化,使得支护施工时,工作机构部的稳定性更好。
162.进一步的,锚杆台车包括有顶支腿,所述顶支腿安装在承载小车上,用于向上伸展,撑在巷道顶部以进一步增加工作机构部的稳定性。
163.进一步的,内侧锚杆机22通过连接座23安装在内侧伸缩臂21,连接座23能上下旋转,使的锚杆台车行走时,第二支腿17能够水平向前,内侧锚杆机22则水平向后折叠,结构简单,零部件小,且折叠后整个工作机构部的收缩体积较小。
164.进一步的,外侧伸缩臂6上安装旋转座1,旋转座1上设置摆动臂2,外侧锚杆机5安装在摆动臂2上,并且旋转座1、摆动臂2分别能在两个互相垂直的平面内旋转,外侧锚杆机5的灵活程度更高,能够适应不同的巷道环境,同时,外侧伸缩臂6能够很好的收缩,避免误触碰。
165.进一步的,旋转座1上连接有载人平台14,载人平台14可升降,并且,摆动臂2可以旋转180
°
后,控制滑动座3将锚杆机放置最低位,实现底板帮锚杆的施工,同时,载人平台14降至最低位置,能保证施工人员的视野。
166.本公开提供的锚杆台车相比较现有技术,缩短了锚杆机与迎头的距离,内侧锚杆机与外侧锚杆机能够独立操纵,外侧锚杆机活动方向灵活,外侧锚杆机能够实现底板帮锚
杆的施工,且钻孔力度大,设置了多个站人的平台,且施工人员上下平台更方便,施工时多个站人平台能分别进行运动,确保施工时的视野更好。
167.以上对本公开进行了详细介绍,本文中应用了具体个例对本公开的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本公开及核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本公开原理的前提下,还可以对本公开进行若干改进和修饰,这些改进和修饰也落入本公开权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。