一种基于岩渣物理特征的tbm掘进优化方法
技术领域
1.本发明涉及隧道掘进技术领域,特别涉及一种基于岩渣物理特征的tbm掘进优化方法。
背景技术:
2.随着地下空间被不断开发,隧道工程的开挖难度和机械化水平在逐步提升,全断面隧道掘进机(tunnel boring machine,tbm)得到了快速发展和应用。传统的钻爆法施工安全性差且施工程序复杂,相比之下tbm具有以下优点:
①
改善了作业人员的洞内劳动条件,保证了施工的安全性;
②
掘进速度是传统钻爆法的3
‑
10倍,并且可以实现连续掘进;
③
隧道整体成型效果好,实现装配一体化;
④
施工过程中噪声扰动小,对周围环境基本无影响。
3.在tbm掘进过程中,主要依靠安装在掘进机刀盘上刀具与岩石之间的作用来实现破岩,刀具在法向推力和滚动力的作用下压向掌子面,使岩石产生破碎。而在实际施工推进中,由于掘进面岩体的非均质性和各向异性,当地层条件发生变化时,对tbm掘进过程的影响较大,若不及时根据当前地层的岩石状态来调整tbm的主要掘进控制参数,将导致tbm掘进效率降低、滚刀磨损严重、设备卡机等不良后果。
4.对于施工过程中存在的隐患,从现有的测试技术和预测方法看来,还有一些不足之处可以进行优化:
①
关于岩渣物理特征的测试技术较为简易,通常在出渣皮带的上方架设工业相机进行采集图像信息,并结合传统筛分析的方法判别岩渣的颗粒级配情况,测试中所获取的岩渣几何参数和物理参数有限,且耗时较长,无法对tbm动态掘进过程进行及时反馈;
②
关于算法预测tbm掘进参数的研究内容,在智能预测及优化决策方法中,通常只选取单一类型的参数作为优化方法中的指标,缺少对tbm掘进参数以及岩渣参数的联合考量,对预测结果的准确性有待提高。
技术实现要素:
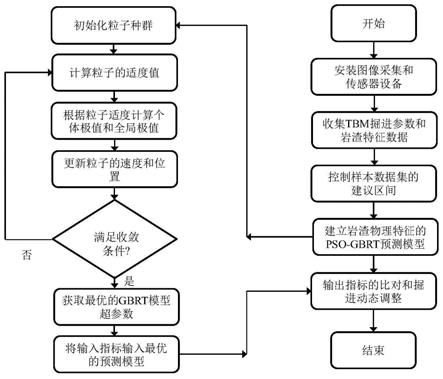
5.为了解决现有技术中存在的不足,本发明提供一种基于岩渣物理特征的tbm掘进优化方法。综合利用tbm掘进指标、岩渣的几何和物理指标形成训练集,构建以gbrt模型为基础的算法预测方法,输入训练集中操作参数的优化目标进行全局寻优以及参数反演,输出得到的tbm主要掘进参数进行预测评价。以此来分析tbm掘进前方地质情况和主要控制参数调整依据,为tbm的安全高效、智能化掘进提供了大数据支持。
6.实现本发明目的的技术解决方案为:一种基于岩渣物理特征的tbm掘进优化方法,包括以下步骤:
7.步骤1、数据采集设备的选择,其中图像采集装置包括工业相机、红外线热像仪以及高光谱成像仪,采用led补光灯作为辅助设备;传感器设备采用压力式称重传感器;通过接线与后台的数据综合存储中心关联,实时采集tbm掘进过程中岩渣的图像信息和重量数据。
8.步骤2、实时样本数据集的获取,图像采集装置中工业相机获取岩渣形状的表面图像信息,红外热成像获取岩渣表面温度分布信息的热像数据,高光谱成像仪获取岩渣中矿物的诊断性光谱特征;传感器中通过压力式称重传感器获取不同阶段岩渣的重量信息;在tbm主控室中机器运行记录仪现场收集tbm的现场掘进参数。
9.步骤3、数据的处理设计,将岩渣的几何信息特征、物理信息特征以及tbm的现场掘进参数,形成完整的样本数据集,并选择模型训练的输入指标和输出指标,初定合理的指标取值区间。
10.步骤4、数据的训练反馈,使用样本数据集建立粒子群算法优化的梯度提升回归树(pso
‑
gbrt)模型,将数据集分为训练组数据和测试组数据,先使用训练组数据对gbrt模型的关键参数进行训练,获得最优模型参数,再将测试组参数导入gbrt模型得到gbrt预测机。
11.步骤5、数据信息的辅助反馈与动态调整,将输入指标导入最优的预测模型中训练后,得到设定的输出指标,与规范或设计案例进行比对,依据模型预测和比对的结果,动态调整tbm掘进参数,完成对tbm安全高效掘进的优化。
12.作为优选,构建所述步骤1中图像采集装置,具体步骤为:
13.图像采集装置中工业相机、红外线热像仪以及高光谱成像仪,均安装在出渣皮带的上方位置,沿着皮带出渣方向依次记录图像信息,通过数据线将图像信息存储于后台的数据中心,保证数据的稳定传输,出渣皮带两侧安装led补光灯作为辅助设备;
14.压力式称重传感器安装在出渣皮带的下方,通过接线与后台的数据综合存储中心关联,实时记录tbm掘进过程中岩渣的图像信息和重量数据,图像的存储和处理均在计算机系统上完成。
15.作为优选,构建所述步骤2中样本数据集,具体步骤为:
16.tbm掘进的影响指标众多且存在相关性,对于优化模型的参数选取应首先考虑到参数的易得性以及预测的准确性。因此,在tbm掘进过程中,所获取的参数指标包括刀盘推力(fn)、刀盘扭矩(t)和刀盘转速(rpm);
17.工业相机采集岩渣的二维图像信息,经过图像灰度处理,提取岩渣的形状和大小等特征,估算岩渣的短轴(c)、中轴(b)和长轴(a)等几何参数指标;
18.红热成像仪在不接触岩渣的情况下,获取的热成像数据,经过图像识别,得到岩石近表面温度分布信息,换算后可获得岩渣的含水量(mc)、含泥量(qc)等物理参数指标;
19.高光谱成像仪拍摄的岩渣图像,测定岩渣中每种矿物的高光谱反射率波谱曲线,建立矿物的高光谱反射率波谱数据库,并将其植入由matlab开发的矿物自动识别系统中,作为矿物自动识别的标准,从而计算岩渣中金属含量,获取刀具的磨损量(vb)信息,了解掘进过程中刀具磨损情况;
20.压力式称重传感器获取岩渣的重量(w)参数指标,结合工业相机拍摄图像中所获取的岩渣几何特征,确定岩渣的粒径范围。
21.作为优选,构建所述步骤3中输出指标,具体步骤为:
22.确定以净掘金速率(pr)为输出指标,即为tbm一次连续掘进过程中挖掘长度与相对应挖掘时间的比值,通过优化的情况,评定tbm掘进参数值的建议区间。
23.作为优选,构建所述步骤4中采用粒子群算法优化的梯度提升回归树(pso
‑
gbrt)模型,具体步骤为:
24.(1)初始化粒子群算法的种群数量20,最大迭代次数200,学习因子c1和c2为1.5,确定模型超参数弱学习器数量,最大树深度,学习速率的初始值,弱学习器数量取值范围为1到1000,最大树深度的取值范围为1到5,学习速率的取值范围为0.01到1,并随机取得这些参数的初始值;
25.(2)计算粒子群个体的适度值,适度值由样本预测值与样本真实值之间的均方误差计算,所有粒子中适应度最好的数值设置为群体极值;
26.(3)更新每个粒子的速度和位置,并与前一时刻的极值进行比较,更新个体和群体极值;
27.(4)判断是否达到预先设定的最大迭代次数或最小误差条件。若不满足,则返回步骤(2),若满足结束条件,则停止迭代,输出参数的最优解;
28.(5)对pso
‑
gbrt模型预测性能进行检验,指标r平方(r2)和均方误差根(rmse)计算公式为如下:
[0029][0030][0031]
式中,n为样本个数;y
real
和y
predict
分别表示实测值和预测值;和分别表示测量值的均值和预测值的均值;
[0032]
(6)若r2和rmse满足设定的tbm掘进预测精度要求,进行下一步骤,且将pso
‑
gbrt预测模型设为最终模型;如果不满足预设的tbm掘进预测精度要求,则返回步骤1)重复进行模型训练和指标优化。
[0033]
作为优选,构建所述步骤5中动态调整掘进参数,具体步骤为:
[0034]
(1)将输入指标最终的pso
‑
gbrt预测模型中,进行辅助决策,输出预测模型指标;
[0035]
(2)整理输出的最优预测模型指标数值,与《盾构法隧道施工及验收规范》(gb50446
‑
2017)以及盾构施工技术实例中的数值进行比对,确定后续掘进过程中动态调整的预案;
[0036]
(3)总结各性能参数在掘进过程中的变化规律,合理选择最优掘进参数的组合。
[0037]
与现有技术相比,本发明的有益效果是:
[0038]
对于tbm掘进过程中,关于岩渣物理特征的测试方法较为完整,通常在出渣皮带的上方架设不同图像采集装置,获取岩渣含水量、刀具磨损情况等信息,并结合传感器数据判别岩渣的颗粒级配情况,可以做到对tbm动态掘进过程进行及时反馈。
[0039]
对于tbm参数的研究方法中,将tbm掘进参数、几何参数和物理参数互相联系,同时作为约束条件对tbm的掘进参数进行优化,提高了参数预测结果的可靠性,并且通过机器学习能实时对大量岩渣进行识别,实时输出tbm掘进参数的参考范围。
[0040]
对于tmb掘进参数辅助决策中,本发明中除了使用常规的梯度提升回归树模型,还组合了粒子群优化算法,从而找到梯度提升回归树模型的最佳参数,提高了模型的预测精
度,能够以有效地为tbm掘进参数的动态调整提供参考。
附图说明
[0041]
图1为本发明的流程示意图。
[0042]
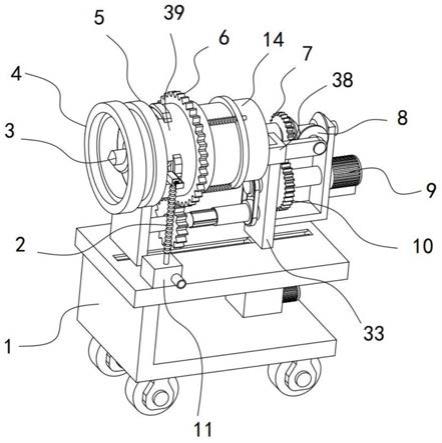
图2为岩渣信息采集装置示意图。
[0043]
其中,1—工业相机,2—红外热成像仪,3—高光谱成像仪,4—称重传感器,5—led补光灯,6—数据综合存储中心,7—工业电脑,8—岩渣,9—出渣皮带。
具体实施方式
[0044]
为解决背景技术所介绍的现有技术中存在的不足,本发明提出了一种基于岩渣物理特征的tbm掘进优化方法,根据tbm掘进参数和岩渣信息,采用粒子群算法优化的梯度提升回归树(pso
‑
gbrt)模型实现掘进过程的动态调整,进而有效提高tbm掘进速率,下面结合附图与实施例对本发明作进一步详细说明。
[0045]
实施例,包括以下步骤:
[0046]
(1)信息采集设备安装
[0047]
本发明实施例的tbm开挖岩渣物理特征的自动采集与分析系统,该系统包括:工业相机、红外热成像仪、高光谱成像仪以及称重传感器,如图2所示,沿箭头的出渣方向依次在传送带安装信息采集设备装置,并采用led补光灯对出渣皮带上的岩渣进行灯光补偿。
[0048]
(2)数据的采集和处理
[0049]
工业相机采集岩渣的二维图像信息,将获取的岩渣图像信息进行图片自动识别,经过岩渣图像处理后,获得岩渣的形状及几何特征。岩渣图像处理包括将所采集的岩渣彩色图像转化为灰度图像,即当灰度值大于事先设定的阈值时为1,小于阈值则为0,使用图像联通区域检测算法来判断连通区域,连通区域即为岩渣的位置,根据连通区域的像素点则可以计算出岩渣中轴与长轴的比值(b/a)及短轴(c)。
[0050]
红外热成像仪采集岩渣的热图像,通过红外热像仪接收被测物体所发射的红外能量,可以把不可见的红外信息转换成可见光图像,以热图像的形式直观准确的反映物体的二维温度场分布。含水量大的岩渣其表面的温度,要低于含水量小的岩渣。通过温度值的换算岩渣的含水量(mc)和含泥量(qc)。
[0051]
高光谱成像测试仪得到集图像数据和光谱数据于一体的三维数据信息,对光谱数据成像信号进行特征提取。在矿物成分的识别中,0.4~2.5μm的光谱区间特性,主要取决于矿物晶格结构中存在的铁、铜、钢等过渡性金属元素的电子跃迁,从而识别岩渣中的刀具成分,获取tbm刀具的磨损量(vb)。
[0052]
称重传感器通过测量出渣皮带上承受的负载来测量岩渣的力,将来自岩渣的压力转换成相应的电信号,从而达到测量岩渣的重量(w)。将岩渣的几何特征和重量数据相结合,确定粒径分布范围。
[0053]
通过掘进工作台的操作系统,采集tbm的掘进参数刀盘推力(fn)、刀盘扭矩(t)以及刀盘转速(rpm)。
[0054]
(3)样本集的选取
[0055]
采集tbm掘进参数特征,岩渣几何特征以及物理特征,建立了一个包含750个数据
样本的数据库用于tbm掘进速率pr的建模。在机器学习研究中,通常将整个样本集分为两组,一组使用训练数据集开发预测模型,一组使用测试数据集评估开发的模型。参考现有的相关研究,通常分配20%
‑
30%的数据集用于模型的测试。因此,在本实施例中,600个样本集用于训练阶段,其余150个样本集用于模型评估或测试阶段。
[0056]
(4)样本集的训练
[0057]
使用训练组数据建立gbrt模型,对选定的输入指标进行训练,为了使gbrt模型获得较高的泛化能力,使用pso优化算法来对模型的n_estimators、learning_rate、max_depth这三个参数进行寻优。
[0058]
首先,初始化算法的参数,确定模型超参数n_estimators、learning_rate、max_depth的初始值和取值范围,初值设定种群数量20,最大迭代次数200,学习因子c1和c2为1.5。其次,计算粒子群个体的适度值,适度值由样本预测值与样本真实值之间的均方误差计算,所有粒子中适应度最好的设置为全体极值g_best。然后,更新粒子的速度和位置,并与前一时刻的极值进行比较,更新极值。最后,判断设定的结束条件是否满足。若满足结束条件,则停止迭代,输出参数最优解,获取最优参数解下的gbrt预测模型。
[0059]
(5)数据信息的反馈和比对
[0060]
利用测试集评估预测模型中,r2指标评价模型预测模型性能,计算公式为:
[0061][0062]
其中,n为样本个数;y
i
表示实测值;y
′
i
表示预测值;表示测量值的均值;表示预测值的均值;i=1,2,
…
n。根据要求,预测的tbm净掘进速率的r2应达到0.85以上。
[0063]
根据输出指标tbm净掘进速率(pr),整理优化情况下输出指标所对应的tbm掘进参数、岩石的几何特征和物理特征值,与《盾构法隧道施工及验收规范》(gb50446
‑
2017)以及盾构施工技术实例中的数值进行比对。当预测模型输出的净掘进速率小于预设净掘进速率时,通过输出指标所对应的特征值进行动态调整,若预测信息显示岩渣中金属含量将升高,说明滚刀可能出现偏磨现象,应及时调整刀盘扭矩和转速等参数;若预测信息显示岩渣中含水量将升高,说明滚刀可能出现结泥现象,应尽量减小推力,控制出水量。
[0064]
在大数据广泛应用发展的背景下,本发明具有实时性,通过机器学习能对现场大量岩渣的物理特征进行识别,实时输出tbm净掘进速率,实现tbm掘进参数的动态调整,从而为tbm安全高效的掘进提供参考。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。