1.本发明涉及一种大型货运无人机物料顶出结构及物料投放方法,应用在大型无人机上的物资输送、空投装置,可以自动完成多个物资托盘在无人机上输送、空投的实用型发明,主要涉及物资托盘输送、空投等方面。
背景技术:
2.目前在一些类似物流的领域里,要进行物资配送时。一般采用陆运、空运和人工搬运的形式进行物资的配送。然而当特殊环境下人员无法到达的原因导致无法实现上述配送方式,所以提供一种无人空投装置成为了亟待解决的技术问题。
技术实现要素:
3.本发明的目的在于,提供一种大型货运无人机物料顶出结构,应用在无人机空投上,可以由无人机在飞行过程中自主完成托盘机舱内的输送,及空投任务。解决了由于人员无法到达的环境下,物资输送的问题。便于在特殊环境下物资投放更加及时、准确、便捷,而且提高物资输送准确率,节约人工成本。
4.为解决上述技术问题,本发明采用如下的技术方案:
5.一种货运无人机货物存储导出结构,包括相互平行的至少两条传送线,传送线的上方具有支撑架构,支撑架构上具有若干沿传送线布置的竖直料仓;传送线的端部设有纵向输送线,纵向输送线垂直于传送线,纵向输送线的一侧设有导向结构;导向结构包括平移轨道,平移轨道上具有滑轨,滑轨上设有平移装置,平移装置上具有输出电机和弧形导料板;弧形导料板的一端固定在平移装置上,弧形导料板的另一端朝向传送线,弧形导料板上安装有导料辊,导料辊和输出电机的输出轴传动连接。
6.前述的一种大型货运无人机物料顶出结构中,所述竖直料仓包括第一侧提升机构和第二侧提升机构,第一侧提升机构包括第一上部旋转轴和第一下部旋转轴,第一上部旋转轴和第一下部旋转轴相互平行,第一上部旋转轴位于第一下部旋转轴的上方,第一上部旋转轴和第一下部旋转轴均安装在支撑架构上;第一提升机构还包括第一左侧传动带和第一右侧传动带,第一左侧传动带和第一右侧传动带均设置在第一上部旋转轴和第一下部旋转轴上,第一左侧传动带和第一右侧传动带上均设有若干支撑条;第二侧提升机构包括第二上部旋转轴和第二下部旋转轴,第二上部旋转轴和第二下部旋转轴相互平行,第二上部旋转轴位于第二下部旋转轴的上方,第二上部旋转轴和第二下部旋转轴均安装在支撑架构上;第二提升机构还包括第二左侧传动带和第二右侧传动带,第二左侧传动带和第二右侧传动带均设置在第二上部旋转轴和第二下部旋转轴上,第二左侧传动带和第二右侧传动带上均设有若干支撑条。竖直料仓向上拖动货盘,是通过托槽插在支撑条上,然后向上移动支撑条,将托盘向上托起。
7.前述的一种大型货运无人机物料顶出结构中,第一侧提升机构还包括第一驱动装置,第一驱动装置安装在支撑架构上,第一上部旋转轴上具有第一传动轮,第一驱动装置的
输出轴和第一传动轮传动连接;第二侧提升机构还包括第二驱动装置,第二驱动装置安装在支撑架构上,第二上部旋转轴上具有第二传动轮,第二驱动装置的输出轴和第二传动轮传动连接。
8.前述的一种大型货运无人机物料顶出结构中,所述竖直料仓的下部设有第一传感器,第一传感器安装在支撑架构上,第一传感器用于检测竖直料仓的下部是否有货盘;竖直料仓的上部具有第二传感器,第二传感器安装在支撑架构上,第二传感器用于检测竖直料仓的上部是否有货盘。
9.前述的一种大型货运无人机物料顶出结构中,传送线的上方均安装有档杆,档杆水平设置,传送线均和档杆平行;所述货盘的两侧具有托槽,所述所述支撑条位于和托槽对应的位置。
10.一种货运无人机货物导出方法,采用以上所述的一种大型货运无人机物料顶出结构,包括下述内容:将装有货物的货盘放置在纵向输送线上,通过弧形导料板和导料辊将货盘导向其中一条传送线,货盘经过第一个竖直料仓时,第一传感器检测到货盘位于竖直料仓的下部,同时第二传感器检测到竖直料仓的上部没有货盘;在第一驱动装置和第二驱动装置的作用下通过第一左侧传动带、第一右侧传动带、第二左侧传动带和第二右侧传动带将货盘移动到竖直料仓的第二层,直至竖直料仓的顶层也具有货盘;第二传感器检测到竖直料仓的顶层也具有货盘,第一驱动装置和第二驱动装置停止转动并保持;然后货盘移动到下一个竖直料仓,并重复上述过程,直至本条传送线所有的竖直料仓均填满货盘,然后通过弧形导料板和导料辊将货盘导向另一条传送线,直至所有的传送线的竖直料仓全部填满,装货完毕。
11.前述的一种货运无人机货物导出方法中,本方法还包括下述内容:在空投前,同一条传送线每个竖直料仓的第一驱动装置和第二驱动装置均运行,将最下层的货盘放在对应的传送线上,货盘进入纵向输送线上,通过弧形导料板和导料管改变货盘的移动方向,然后从舱门投放;然后将第二层的货盘依照上述方法投放,然后将其余传送线的货盘依照上述方法投放。
12.与现有技术相比,本发明应用在无人机空投上,可以由无人机在飞行过程中自主完成托盘机舱内的输送,及空投任务。解决了由于人员无法到达的环境下,物资输送的问题。便于在特殊环境下物资投放更加及时、准确、便捷,而且提高物资输送准确率,节约人工成本。
附图说明
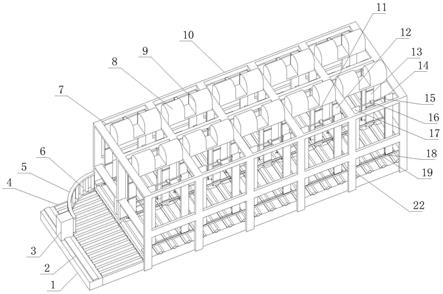
13.图1是本发明的一种实施例的结构示意图;
14.图2是本货盘的一种实施例的结构示意图。
15.附图标记:1
‑
平移轨道,2
‑
滑轨,3
‑
平移装置,4
‑
纵向输送线,5
‑
弧形导料板,6
‑
导料辊,7
‑
竖直料仓,8
‑
第一驱动装置,9
‑
第二驱动装置,10
‑
支撑架构,11
‑
支撑条,12
‑
第一左侧传动带,13
‑
第一右侧传动带,14
‑
第二右侧传动带,15
‑
第二上部旋转轴,16
‑
第二传动轮,17
‑
第二左侧传动带,18
‑
第二下部旋转轴,19
‑
档杆,20
‑
货盘,21
‑
托槽,22
‑
传送线。
16.下面结合附图和具体实施方式对本发明作进一步的说明。
具体实施方式
17.本发明的实施例1:一种货运无人机货物存储导出结构,包括相互平行的至少两条传送线22,传送线22的上方具有支撑架构10,支撑架构10上具有若干沿传送线22布置的竖直料仓7;传送线22的端部设有纵向输送线4,纵向输送线4垂直于传送线22,纵向输送线4的一侧设有导向结构;导向结构包括平移轨道1,平移轨道1上具有滑轨2,滑轨2上设有平移装置3,平移装置3上具有输出电机和弧形导料板5;弧形导料板5的一端固定在平移装置3上,弧形导料板5的另一端朝向传送线22,弧形导料板5上安装有导料辊6,导料辊6和输出电机的输出轴传动连接。所述竖直料仓7的下部设有第一传感器,第一传感器安装在支撑架构10上,第一传感器用于检测竖直料仓7的下部是否有货盘20;竖直料仓7的上部具有第二传感器,第二传感器安装在支撑架构10上,第二传感器用于检测竖直料仓7的上部是否有货盘20。传送线22的上方均安装有档杆19,档杆19水平设置,传送线22均和档杆19平行;所述货盘20的两侧具有托槽21,所述所述支撑条11位于和托槽21对应的位置。
18.实施例2:一种货运无人机货物存储导出结构,包括相互平行的至少两条传送线22,传送线22的上方具有支撑架构10,支撑架构10上具有若干沿传送线22布置的竖直料仓7;传送线22的端部设有纵向输送线4,纵向输送线4垂直于传送线22,纵向输送线4的一侧设有导向结构;导向结构包括平移轨道1,平移轨道1上具有滑轨2,滑轨2上设有平移装置3,平移装置3上具有输出电机和弧形导料板5;弧形导料板5的一端固定在平移装置3上,弧形导料板5的另一端朝向传送线22,弧形导料板5上安装有导料辊6,导料辊6和输出电机的输出轴传动连接。所述竖直料仓7的下部设有第一传感器,第一传感器安装在支撑架构10上,第一传感器用于检测竖直料仓7的下部是否有货盘20;竖直料仓7的上部具有第二传感器,第二传感器安装在支撑架构10上,第二传感器用于检测竖直料仓7的上部是否有货盘20。传送线22的上方均安装有档杆19,档杆19水平设置,传送线22均和档杆19平行;所述货盘20的两侧具有托槽21,所述所述支撑条11位于和托槽21对应的位置。
19.所述竖直料仓7包括第一侧提升机构和第二侧提升机构,第一侧提升机构包括第一上部旋转轴和第一下部旋转轴,第一上部旋转轴和第一下部旋转轴相互平行,第一上部旋转轴位于第一下部旋转轴的上方,第一上部旋转轴和第一下部旋转轴均安装在支撑架构10上;第一提升机构还包括第一左侧传动带12和第一右侧传动带13,第一左侧传动带12和第一右侧传动带13均设置在第一上部旋转轴和第一下部旋转轴上,第一左侧传动带12和第一右侧传动带13上均设有若干支撑条11;第二侧提升机构包括第二上部旋转轴15和第二下部旋转轴18,第二上部旋转轴15和第二下部旋转轴18相互平行,第二上部旋转轴15位于第二下部旋转轴18的上方,第二上部旋转轴15和第二下部旋转轴18均安装在支撑架构10上;第二提升机构还包括第二左侧传动带17和第二右侧传动带14,第二左侧传动带17和第二右侧传动带14均设置在第二上部旋转轴15和第二下部旋转轴18上,第二左侧传动带17和第二右侧传动带14上均设有若干支撑条11
20.实施例3:一种货运无人机货物存储导出结构,包括相互平行的至少两条传送线22,传送线22的上方具有支撑架构10,支撑架构10上具有若干沿传送线22布置的竖直料仓7;传送线22的端部设有纵向输送线4,纵向输送线4垂直于传送线22,纵向输送线4的一侧设有导向结构;导向结构包括平移轨道1,平移轨道1上具有滑轨2,滑轨2上设有平移装置3,平移装置3上具有输出电机和弧形导料板5;弧形导料板5的一端固定在平移装置3上,弧形导
料板5的另一端朝向传送线22,弧形导料板5上安装有导料辊6,导料辊6和输出电机的输出轴传动连接。所述竖直料仓7的下部设有第一传感器,第一传感器安装在支撑架构10上,第一传感器用于检测竖直料仓7的下部是否有货盘20;竖直料仓7的上部具有第二传感器,第二传感器安装在支撑架构10上,第二传感器用于检测竖直料仓7的上部是否有货盘20。传送线22的上方均安装有档杆19,档杆19水平设置,传送线22均和档杆19平行;所述货盘20的两侧具有托槽21,所述所述支撑条11位于和托槽21对应的位置。
21.所述竖直料仓7包括第一侧提升机构和第二侧提升机构,第一侧提升机构包括第一上部旋转轴和第一下部旋转轴,第一上部旋转轴和第一下部旋转轴相互平行,第一上部旋转轴位于第一下部旋转轴的上方,第一上部旋转轴和第一下部旋转轴均安装在支撑架构10上;第一提升机构还包括第一左侧传动带12和第一右侧传动带13,第一左侧传动带12和第一右侧传动带13均设置在第一上部旋转轴和第一下部旋转轴上,第一左侧传动带12和第一右侧传动带13上均设有若干支撑条11;第二侧提升机构包括第二上部旋转轴15和第二下部旋转轴18,第二上部旋转轴15和第二下部旋转轴18相互平行,第二上部旋转轴15位于第二下部旋转轴18的上方,第二上部旋转轴15和第二下部旋转轴18均安装在支撑架构10上;第二提升机构还包括第二左侧传动带17和第二右侧传动带14,第二左侧传动带17和第二右侧传动带14均设置在第二上部旋转轴15和第二下部旋转轴18上,第二左侧传动带17和第二右侧传动带14上均设有若干支撑条11
22.第一侧提升机构还包括第一驱动装置8,第一驱动装置8安装在支撑架构10上,第一上部旋转轴上具有第一传动轮,第一驱动装置8的输出轴和第一传动轮传动连接;第二侧提升机构还包括第二驱动装置9,第二驱动装置9安装在支撑架构10上,第二上部旋转轴15上具有第二传动轮16,第二驱动装置9的输出轴和第二传动轮16传动连接。
23.一种货运无人机货物导出方法,采用实施例3所述的一种大型货运无人机物料顶出结构,包括下述内容:将装有货物的货盘20放置在纵向输送线4上,通过弧形导料板5和导料辊6将货盘20导向其中一条传送线22,货盘20经过第一个竖直料仓7时,第一传感器检测到货盘20位于竖直料仓7的下部,同时第二传感器检测到竖直料仓7的上部没有货盘20;在第一驱动装置8和第二驱动装置9的作用下通过第一左侧传动带12、第一右侧传动带13、第二左侧传动带17和第二右侧传动带14将货盘20移动到竖直料仓7的第二层,直至竖直料仓7的顶层也具有货盘20;第二传感器检测到竖直料仓7的顶层也具有货盘20,第一驱动装置8和第二驱动装置9停止转动并保持;然后货盘20移动到下一个竖直料仓7,并重复上述过程,直至本条传送线22所有的竖直料仓7均填满货盘20,然后通过弧形导料板5和导料辊6将货盘20导向另一条传送线22,直至所有的传送线22的竖直料仓7全部填满,装货完毕。
24.本方法还包括下述内容:在空投前,同一条传送线22每个竖直料仓7的第一驱动装置8和第二驱动装置9均运行,将最下层的货盘20放在对应的传送线22上,货盘20进入纵向输送线4上,通过弧形导料板5和导料管改变货盘20的移动方向,然后从舱门投放;然后将第二层的货盘20依照上述方法投放,然后将其余传送线22的货盘20依照上述方法投放。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。