1.本公开总体上涉及电阻桥电路,并且特别涉及用于对由电阻桥电路输出的信号提供温度补偿的电路。
背景技术:
2.参考图1,图1示出了微机电系统(mems)器件10的俯视图,其被配置为支持围绕轴线12的振荡。器件10包括主体14,主体14在给定系统扫描应用中包括反射镜表面16。主体14分别通过在其与锚结构22之间的第一扭力(弹簧)臂18和在其与锚结构24之间的第二扭力(弹簧)臂20悬置在腔体(在该顶视图中未明确示出)上。具有本领域技术人员公知的配置的(例如,电容性类型的)驱动部件26在每个扭力臂18、20处被提供。响应于驱动信号(例如,ac信号)的驱动部件26的致动引起主体14围绕轴线12的振荡运动。反射镜表面16接收激光信号并且朝向目标表面反射接收到的激光信号。围绕轴线12的振荡引起反射的激光信号跨目标表面扫描。
3.重要的是知道主体14围绕轴线12的振荡运动的机械角度,以便支持控制环的精确操作,该控制环驱动反射镜的振荡。物理性质(诸如压力/角度)传感器30安装在扭力(弹簧)臂18和20中的至少一个扭力臂与锚结构22和24中的相应一个锚结构之间的旋转弹簧锚点处或附近。传感器30典型地由电阻式类型传感器元件形成,其中电阻式类型传感器元件的电阻取决于机械应力,并且因此(优选地基本上线性地)随着主体14围绕轴线12的振荡运动的机械角度θ的改变而变化。传感器30以电阻值的改变响应于主体的机械角度的改变,该电阻值的变化可以被感测和处理。电阻式类型传感器元件典型地由惠斯通(wheatstone)桥电路40形成,如图2中所示意性示出的。偏置电压vbias被施加在输入节点42与44之间,并且输出电压vout在输出节点46与48之间被生成。第一电阻器r1连接在节点42与节点46之间。第二电阻器r2连接在节点42与节点48之间。第三电阻器r3连接在节点44与节点46之间。第四电阻器r4连接在节点44与节点48之间。电阻器r1至r4全部具有相同的标称电阻值r。然而,响应于由主体14的振荡运动在传感器30处所引起的机械应力,存在针对电阻器r1至r4中的一个或多个电阻器的电阻值变化δr,该电阻值变化δr根据以下等式引起输出电压vout的改变:
[0004][0005]
vout的值因此取决于mems器件10的动作状态σ(t)(即,机械角度θ),mems器件10的温度依赖性的灵敏度s(t)和偏置电压vbias根据以下等式被施加于桥电路40:
[0006]
vout=s(t)
·
σ(t)
·
vbias
[0007]
其中:δr/r等于桥的温度依赖性的灵敏度s(t)乘以反射镜角度σ(t)。
[0008]
因此,除了需要了解被施加到桥的偏置电压vbias和来自桥的输出电压vout之外,实现mems器件10的动作状态的准确测量还需要了解mems器件10的温度依赖性的灵敏度s(t),该灵敏度s(t)由以下等式给出:
[0009]
s(t)=s0(1 α
s1
·
δt α
s2
·
δt2)
[0010]
其中:α
s1
是将灵敏度与温度相关联的一阶温度系数;以及α
s2
是将灵敏度与温度相关联的二阶温度系数。
[0011]
然后有必要补偿在用于mems器件10的操作的温度范围上的灵敏度。这只有在温度变化δt(即实际温度与某参考温度之间的差)为已知的情况下才可以实现。
[0012]
再次参考图1,然后通常在mems器件10中还包括温度传感器32。作为示例,温度传感器32可以位于锚结构22或24中,其中传感器元件的电阻取决于温度,并且因此(优选地基本上线性地)随着mems器件处的温度的改变而变化。传感器32的热依赖性的电阻效应将温度转变成电阻值的改变,该电阻值的改变可以被感测和处理。传感器元件典型地由单独的惠斯通桥电路(在配置上类似于如图2中所示意性示出的桥电路40)形成。在该情况下,桥的vout的值取决于温度,并且根据感测到的电压,mems器件10的实际温度可以被计算。由此,温度改变是已知的,灵敏度然后可以由前述等式确定并且被用来补偿mems器件10的动作状态。
[0013]
该系统配置存在许多缺点,包括:a)需要更多到mems器件10的电连接,以支持偏置电压的施加和来自两个不同惠斯通桥电路(一个用于压力/角度,另一用于温度)的输出电压的感测;b)由于附加的掩模和工艺步骤,增加了制造mems器件10的复杂性;c)添加的制造成本;d)由于温度感测是在压力/角度感测的位置附近、但不恰好在压力/角度感测的位置处执行而引起的精确性缺乏;e)由于包括了附加的温度感测桥电路而引起所占用的电路面积的增加。
[0014]
因此,在本领域中需要提供利用压力/角度感测电阻桥电路来支持温度补偿的更好的解决方案。
技术实现要素:
[0015]
在实施例中,电路包括:桥驱动器电路,被配置为跨电阻桥电路的第一输入节点和第二输入节点施加偏置电压;感测电路,被配置为感测响应于所施加的偏置电压而流经所述电阻桥电路的桥电流;第一处理电路,被配置为根据感测到的桥电流确定所述电阻桥电路的依赖于温度的灵敏度;以及第二处理电路,被配置为处理在所述电阻桥电路的第一输出节点和第二输出节点处的电压输出,并且响应于所确定的依赖于温度的灵敏度来施加温度校正。
附图说明
[0016]
将在下面结合附图对具体实施例的非限制性描述中详细讨论前述和其他特征以及优势,其中:
[0017]
图1是微机电系统(mems)器件的俯视图;
[0018]
图2是惠斯通桥电路的示意图;
[0019]
图3是mems感测系统的示意图;
[0020]
图4示出了针对图3的电路的附加电路细节;
[0021]
图5示出了针对增益和偏差校正电路的框图;
[0022]
图6示出了针对adc驱动器电路的电路图;
[0023]
图7示出了针对由adc电路处理的模拟信号的颤动的框图;
[0024]
图8示出了针对1位数模转换器(dac)电路的电路图;
[0025]
图9示出了通过adc颤动的使用而实现的优势的频谱表示;
[0026]
图10示出了dsp的框图;以及
[0027]
图11是dsp算法的框图。
具体实施方式
[0028]
在不同的附图中,相同的元件已利用相同的附图标记指定。特别地,不同实施例共有的结构和/或功能元件可以利用相同的附图标记指定并且可以具有完全相同的结构、尺寸和材料特性。
[0029]
在整个本公开中,术语“连接”被用来指定电路元件之间除导体之外没有中间元件的直接电连接,而术语“耦合”被用来指定电路元件之间的电连接,该电连接可以是直接的电连接,或可以是经由一个或多个中间元件的电连接。
[0030]
术语“大约”、“基本上”和“近似地”在本文中被用来指定讨论中的值的正负10%(优选正负5%)的公差。
[0031]
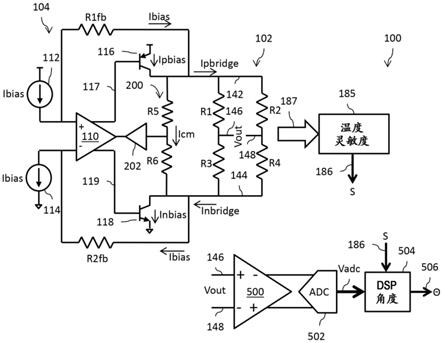
现在参考图3,图3示出了mems感测系统100的示意图。系统100包括由驱动器电路104偏置的电阻式惠斯通桥电路102。电阻式惠斯通桥电路102包括输入节点142和144以及输出节点146和148。驱动器电路104跨输入节点142和144施加偏置电压vbias。输出电压vout跨输出节点146和148被生成。第一电阻器r1连接在节点142与节点146之间。第二电阻器r2连接在节点142与节点148之间。第三电阻器r3连接在节点144与节点146之间。第四电阻器r4连接与节点144和节点148之间。电阻器r1至r4均具有相同的标称电阻值r。在一个实施例中,惠斯通桥电路102形成用于mems器件的压力/角度传感器30(参见图1)。
[0032]
驱动器电路104包括运算放大器110,该运算放大器110具有非反相输入和反相输入以及单端的非反相输出,该单端的非反相输出包括两个电压移位的输出信号117、119。用于驱动器电路104的放大的输出级包括第一晶体管116,该第一晶体管116由放大器110的电压移位的输出信号117中的一个电压移位的输出信号控制,并且连接到桥的输入节点142。输出级还包括第二晶体管118,该第二晶体管118由放大器110的电压移位的输出信号119中的另一电压移位的输出信号控制,该第二晶体管118连接到桥的输入节点144。
[0033]
第一晶体管116和第二晶体管118可以例如包括双极晶体管器件,该双极晶体管器件具有分别连接到输入节点142和144的集电极端子。第一晶体管116和第二晶体管118的集电极端子相应地形成驱动器电路104的用于施加差分电压偏置vbias到桥102的差分输出节点,其中晶体管116提供对应的驱动电路电流ipbias,并且晶体管118汲取对应的驱动电流inbias,这里电流ipbias和inbias是必需的电流,以满足由驱动器电路104施加的偏置条件,该偏置条件使发生在节点142与144之间的偏置电压vbias。第一晶体管116具有被耦合到电源电压节点(vdd)的发射极和由来自放大器110的输出信号117中的一个输出信号驱动的基极,其中集电极被耦合以向桥电路102的输入节点142提供电流ipbias。第二晶体管118具有被耦合到接地节点的发射极和由来自放大器110的输出信号119中的另一输出信号驱动的基极,其中集电极被耦合以从桥电路102的输入节点144汲取电流inbias。针对晶体管116、118优选使用双极型晶体管器件,因为双极型晶体管器件可以消除闪烁噪声。然而,将
理解,在某些应用中,针对晶体管116、118可以使用mosfet器件。
[0034]
反馈电阻器r1fb连接在放大器110的非反相输入与桥电路120的输入节点142(在驱动器电路104的差分输出节点中的一个差分输出节点处)之间。反馈电阻器r2fb连接在放大器110的反相输入与桥电路120的输入节点144(在驱动器电路104的差分输出节点中的另一差分输出节点处)之间。反馈电阻器r1fb和r2fb具有相同的电阻值(rfb),并且设置由驱动器电路提供的放大的闭环增益。第一电流源112被连接以向放大器110的非反相输入提供由电源电压节点(例如,vdd)生成的电流ibias,该偏置电流被配置为流经反馈电阻器r1fb到桥电路的输入节点142处的驱动器电路。第二电流源114被连接以将放大器110的非反相输入处的电流ibias汲取到接地节点,该偏置电流被配置为从桥电路的输入节点144处的驱动器电路输出流经反馈电阻器r2fb。利用该电路配置,施加在桥电路120的输入节点142与144之间的偏置电压vbias因此等于2*rfb*ibias。
[0035]
由于针对驱动器电路104而采用的差分结构,共模反馈被需要以设置放大器110的输出的共模电压。共模电流icm流经共模电阻分压器电路200,该共模电阻分压器电路200由串联在桥电路102的输入节点142与144之间的电阻器r5和r6形成。电阻器r5和r6具有相同的电阻值。在电阻器r5和r6的串联连接处的抽头节点被耦合到反馈放大器202的输入,该反馈放大器202作为缓冲电路来起作用。放大器202的输出被耦合以设置放大器110的共模电压。
[0036]
因此,在输入节点142处流入桥电路120的电流ipbridge等于偏置电流ibias加上驱动电路电流ipbias减去共模电流icm。在输入节点144处从桥电路120流出的电流inbridge等于偏置电流ibias加上驱动电路电流inbias减去共模电流icm。
[0037]
来自桥电路102的输出电压vout被处理以确定mems的动作状态测量(例如,偏转角度θ)。差分信号vout通过模拟前端(afe)电路500来处理,该模拟前端(afe)电路500调节用于进一步处理的信号。例如,afe电路500执行差分信号vout的放大和滤波以实现所期望的信噪比。西格玛
‑
德尔塔模数转换器(adc)502将从afe电路500输出的模拟信号转换为数字信号vadc。数字信号vadc表示mems的角度偏转。数字信号处理(dsp)电路504处理数字信号vadc以产生表示mems的角度偏转θ的数字信号506。该dsp处理操作是本领域技术人员公知的。
[0038]
然而,注意,差分信号vout还受到桥电路102的依赖于温度的行为的影响(如以上所讨论的)。电路185被配置为处理获得的与驱动器电路和桥电路有关的电流信息187,以检测桥电路102的依赖于温度的灵敏度s(t)并且生成灵敏度信号s 186。数字信号处理(dsp)电路504然后可以处理数字信号vadc,并且使用由电路185输出的灵敏度s,以针对温度来校正并且产生表示mems的真实角度偏转θ的数字信号506。该dsp处理操作是本领域技术人员公知的。作为示例,用于确定动作状态的dsp处理功能包括:使用5位西格玛德尔塔模数转换器(adc)将afe的输出转换成数字信号。然后,这些数字信号样本由三阶sinc滤波器来平均,该三阶sinc滤波器提供达到所要求的数据速率所需的采样因子。在该下采样阶段之后,输出乘以灵敏度的倒数(1/s),并且一组数字四次滤波器执行更精细的滤波动作,该更精细的滤波动作允许mems的角度偏转θ的更干净的恢复。
[0039]
因此,将注意,在该实现方式中,针对获得依赖于温度的灵敏度s(t)数据的目的,相同的桥电路102被用于感测mems的动作状态以及检测mems的温度。如先前所提及的,mems
器件10的依赖于温度的灵敏度s(t)通过校准来获得,并且由以下等式给出:
[0040]
s(t)=s0(1 α
s1
·
δt α
s2
·
δt2)
[0041]
为了利用该等式,桥电路102的温度的测量必须被电路185获得。由于我们不想添加附加的温度感测电路(例如,参见图1中的附图标记32),所以必须使用不同的温度感测技术。将注意,桥电路102的温度可以通过测量桥的电阻来间接地测量。根据以下公式,惠斯通桥的电阻取决于温度:
[0042]
r(t)=r0(1 α
r1
·
δt α
r2
·
δt2)
[0043]
其中:δt=t
‑
t0是相对于27℃的参考温度t0的温度变化;r0是在参考温度处的电阻值;以及α
r1
和α
r2
是取决于技术的热系数
‑‑
更具体地:α
r1
是将桥电阻与温度相关联的一阶温度系数;以及α
r2
是将桥电阻与温度相关联的二阶温度系数。
[0044]
响应于跨桥的输入节点142和144而施加的已知的、并且恒定的电压(即,vbias)的施加,桥电阻值继而由电路185通过测量流经桥本身的电流(即,电流ipbridge=inbridge)来提取。如以上所提及的,通过桥电路(ipbridge或inbridge)的电流取决于偏置电流ibias、驱动器电路电流ipbias、inbias和共模电流icm(在本文中统称为电流信息187)。电路185例如通过使用由电流源112和/或114设置的已知电流ibias、感测驱动器电路电流ipbias和/或inbias并且感测电流icm来收集电流信息187。这些电流收集操作可以例如使用适当配置的电流镜像电路来实现,并且流经桥的电流的确定通过适合的电流求和(例如,减法)电路来完成。
[0045]
现在参考图4,图4更详细地示出了电流感测和依赖于温度的灵敏度电路185。将注意,图4省略了用于驱动器104的电路装置中的一些电路装置的图示。
[0046]
第一电流镜像电路120镜像流入输入节点142的驱动器电路电流ipbias,使得电流源126生成镜像的桥偏置电流ip,该镜像的桥偏置电流ip等于按比例因子j缩放的驱动器输出电流ipbias(即,ip=ipbias/j)。第二电流镜像电路122镜像从输入节点144汲取的驱动器电路电流inbias,使得电流源128生成镜像的桥偏置电流in,该镜像的桥偏置电流in等于按比例因子j缩放的桥偏置电流inbias(即,in=inbias/j)。第一电流镜像电路120和第二电流镜像电路122使能由依赖于温度的灵敏度电路185对驱动器电路电流ipbias和inbias的收集(附图标记187)。电流源126和128可以例如使用双极晶体管器件来实现,该双极晶体管器件具有分别与双极晶体管116和118连接的公共发射极和基极。电流源晶体管126具有被耦合到电源电压节点(vdd)的发射极、由来自放大器110的输出信号117中的一个输出信号驱动的基极(与晶体管116形成由镜像因子j缩放的电流镜像120关系)和被耦合以提供镜像的驱动器电路电流ip的集电极。电流源晶体管128具有被耦合到接地节点的发射极、由来自放大器110的输出信号119中的另一输出信号驱动的基极(与晶体管118形成由镜像因子j缩放的电流镜像122关系)和被耦合以汲取镜像的驱动器电路电流in的集电极。针对电流源126和128优选使用双极晶体管器件。针对这个的原因是双极晶体管器件可以消除闪烁噪声。然而,将理解,在一些应用中,针对电流源126和128可以使用mosfet器件。
[0047]
第三电流镜像电路210感测流经共模电阻分压器电路200的共模电流icm,并且从镜像的驱动器电路电流ip中减去由镜像因子j缩放的该电流(即,减去的电流为icm/j)。第四电流镜像电路212感测流经共模电阻分压器电路200的共模电流icm,并且从镜像的驱动器电路电流in中减去由镜像因子j缩放的电流(即,减去的电流为icm/j)。第三电流镜像电
路210和第四电流镜像电路212使能由依赖于温度的灵敏度电路185对共模电流icm的收集(附图标记187)。在该背景中,电流ipbias和inbias受到由于共模电流icm而引起的误差的影响,而电流镜像电路210和212有效地消除了该误差。
[0048]
第五电流镜像电路214被用来从电流源112获得偏置电流ibias的副本(即,这是流经电阻器r1fb的电流),并且从镜像的驱动器电路电流ip中减去由镜像因子j缩放的该电流(即,减去的电流为ibias/j)。第六电流镜像电路216被用来从电流源114获得偏置电流ibias的副本(即,这是流经电阻器r2fb的电流),并且从镜像的驱动器电路电流in中减去由镜像因子j缩放的该电流(即,减去的电流为ibias/j)。第五电流镜像电路214和第六电流镜像电路216使能由依赖于温度的灵敏度电路185对偏置电流ibias的收集(附图标记187)。在该情况下,电流ipbias和inbias受到由于反馈电流ibias而引起的误差的影响,而电流镜像电路214和216有效地消除了该误差。
[0049]
从镜像的桥偏置电流ip中对共模电流icm和偏置电流ibias的减去产生感测到的源桥电流ipsbr(基本上等于ipbridge/j)。同样,从镜像的桥偏置电流in中对共模电流icm和偏置电流ibias的减去产生感测到的灌桥电流insbr(基本上等于inbridge/j)。这些操作使能由依赖于温度的灵敏度电路185对桥电流的收集(附图标记187)。
[0050]
将注意,比例因子j可以采用任何适合的整数或小数值。为了显著降低电路185中的功耗,远大于1的值是优选的。
[0051]
电路185还包括跨阻抗放大器152,该跨阻抗放大器152具有非反相输入和反相输入。反馈电阻器r3fb连接在跨阻抗放大器152的非反相输入与跨阻抗放大器152的反相输出之间。反馈电阻器r4fb连接在跨阻抗放大器152的反相输入与跨阻抗放大器152的非反相输出之间。反馈电阻器r3fb和r4fb具有相同的电阻值。
[0052]
电流数模转换器(dac)电路130接收感测到的桥电流ipsbr,并且响应于数字控制信号135而输出经缩放的电流134,该数字控制信号135指定将由dac电路130施加给感测到的桥电流ipsbr的比例因子m。经缩放的电流134等于m*ipsbr,其中m是数字控制信号135指定的比例因子。经缩放的电流134被施加给跨阻抗放大器152的非反相输入。
[0053]
电流数模转换器(dac)电路132接收感测到的桥电流insbr并且响应于数字控制信号135而输出经缩放的电流136,该数字控制信号135指定将由dac电路132施加给感测到的桥电流insbr的比例因子m。经缩放的电流136等于m*insbr。经缩放的电流136被施加给跨阻抗放大器152的反相输入。
[0054]
独立于依赖温度的电流源140生成偏移电流ipoffset。电流数模转换器(dac)电路144接收偏移电流ipoffset,并且响应于数字控制信号149而输出经缩放的电流148,该数字控制信号149指定将由dac电路144施加给偏移电流ipoffset的比例因子k。经缩放的电流148等于k*ipoffset,其中k是由数字控制信号149指定的比例因子。经缩放的电流148被施加给跨阻抗放大器152的非反相输入。
[0055]
独立于温度的电流源142生成偏移电流inoffset。电流数模转换器(dac)电路146接收偏移电流inoffset并且响应于数字控制信号149而输出经缩放的电流150,该数字控制信号149指定将由dac电路146施加给偏移电流inoffset的比例因子k。经缩放的电流150等于k*inoffset。经缩放的电流150被施加给跨阻抗放大器152的反相输入。在一个实施例中,ipoffset可以等于inoffset。
[0056]
驱动器电路包括运算放大器160,该运算放大器160具有非反相输入和反相输入。输入电阻器r1in被耦合在放大器152的反相输出与放大器160的非反相输入之间。输入电阻器r2in被耦合在放大器152的非反相输出与放大器160的反相输入之间。输入电阻器r1in和r2in具有相同的电阻值,并且在实施例中,该电阻可以是可变的。反馈电阻器r5fb连接在放大器160的非反相输入与放大器160的反相输出之间。反馈电阻器r6fb连接在放大器160的反相输入与放大器160的非反相输出之间。反馈电阻器r5fb和r6fb具有相同的电阻值。
[0057]
驱动器电路被配置为利用模拟输出电压vout(t)驱动模数转换器(adc)电路170。adc电路170包括分别被耦合到放大器160的反相输出和非反相输出的差分输入。adc电路170生成数字输出信号vadc。
[0058]
adc颤动电路172向adc电路170施加颤动信号174。
[0059]
数字信号处理器(dsp)电路180处理数字输出信号vadc,以生成指示桥电流ibridge
norm
的信号182、指示桥电路102的温度改变(δtnorm)的信号184、和指示桥电路102的灵敏度(s)的信号186。
[0060]
如先前所提及的,惠斯通桥的电阻根据以下公式而取决于温度:
[0061]
r(t)=r0(1 α
r1
.δt α
r2
·
δt2)
[0062]
流经桥电路的电流为:
[0063][0064]
其中:是偏移,以及是信号,并且进一步地,为了简单起见,其中仅考虑了线性系数。
[0065]
有必要对增益和偏移二者均施加校正,以便使信号适于adc 170的动态范围。对增益的校正通过比例因子m以及dac 130和132的操作来实行。对偏移的校正通过比例因子k以及dac 144和146的操作来实行。
[0066]
现在参考图5,图5示出了增益和偏移校正电路装置的框图。数字控制信号data_in_m被施加给第一调制器电路230。数字控制信号data_in_m可以例如是8位信号,并且第一调制器电路230因此是操作以产生数字控制信号135的8位调制器,该数字控制信号135被施加以控制dac 130和132的操作。数字控制信号135可以例如是4位信号。dac 130还接收电流ipsbr(即,经缩放的桥电流ipbridge/j),并且响应于数字控制信号135的位的逻辑状态,dac 130通过因子m来缩放电流ipsbr以生成电流信号134,该电流信号134被提供给放大器152的非反相输入。dac132还接收电流insbr(即,定标器桥电流inbridge/j),并且响应于数字控制信号135的位的逻辑状态,dac132通过因子m来缩放电流insbr以生成电流信号136,该电流信号136从放大器152的反相输入被汲取。
[0067]
数字控制信号data_in_k还被施加给第二调制器电路232。第二调制器电路232也可以是操作以产生数字控制信号149的8位调制器,该数字控制信号149被施加以控制dac 144和146的操作。数字控制信号149可以例如是4位信号。dac 144还接收电流ipoffset,并且响应于数字控制信号149的位的逻辑状态,dac 144通过因子k来缩放电流ipoffset来生成电流信号148,该电流信号148被提供给放大器152的非反相输入。dac146还接收电流inoffset,并且响应于数字控制信号149的位的逻辑状态,dac 146通过因子k来缩放电流
inoffset来生成电流信号152,该电流信号152从放大器152的反相输入被汲取。
[0068]
图5中所示的电路装置的操作概念是分别(基于电流ipsbr)向放大器152的差分输入提供电流以及(基于电流insbr)从放大器152的差分输入汲取电流。电流ipsbr和insbr直接表示惠斯通电阻桥电流ipbridge和inbridge。这些电流必须被转变成用于放大、滤波和到数字域的转换的电压信号,以便结合确定依赖于温度的灵敏度来处理。
[0069]
由于将严重限制读出本身的准确性的增益误差和偏移误差的存在,满量程的电流ipsbr和insbr不适合通过模拟前端来直接处理。
[0070]
测量必须由因温度变化而引起的桥电流上的变化构成。当电流ipsbr和insbr是桥电流(分别为ipbridge和inbridge)的缩放版本时,这些电流的变化必须被读取。然而,该变化具有显著低于电流本身的“绝对”值的量级。因此,初步地模拟处理在电流ipsbr和insbr上执行,以便减去某种dc值并且调节其与温度相对的增益。实践中,有利的是减去等于在室(参考)温度处的电流值的偏移并且调节增益,从而在温度范围(从tmin到tmax)中,电流示出了能够利用所有可用的模拟前端动态范围的变化(从imin到imax)。
[0071]
dac 142和144被定制以减去偏移电流(从独立于温度的电流开始),直到dac 126和128分别接收电流ipsbr和insbr,并且施加增益因子。作为一般方法,当前的dac中的任何种类dac可以执行这些操作(即,用于减法的偏移生成和增益变化)。图5中所示的电路仅是针对这些操作的可能(有利的)实现方式的示例。由于两个dac必须提供具有不可忽略的准确性的两个dc(常数)值,所以最好的解决方案是处理过采样(即,西格玛
‑
德尔塔)方案。m
‑
调制器接收表示将以给定的分辨率(即,8位)被施加的增益因子的代码(data_in_m),并且它向dac提供具有较低位数的经调制的代码(到适当的调制频率)。这是公知的过采样。有用的是,允许设计具有有限位数(即,4位)的dac,该dac在任何情况下(由于西格玛
‑
德尔塔调制)能够达到更高的分辨率(即,8位)。相同的概念适于k调制器,该k调制器将从表示要被提供的偏移的不同专用代码(data_in_k)开始工作。
[0072]
图4图示了用于adc电路170的驱动器电路,该驱动器电路包括单个运算放大器级(附图标记160)。在备选实施例中,如图6中所示,用于adc电路170的驱动器电路可以被配置有两个放大级。驱动器电路包括具有运算放大器160a的第一级,该运算放大器160a具有非反相输入和反相输入。输入电阻器r1ain被耦合在放大器152(图4)的反相输出与放大器160a的非反相输入之间。输入电阻器r2ain被耦合在放大器152(图4)的非反相输出与放大器160a的反相输入之间。输入电阻器r1ain和r2ain具有相同的电阻值。在一个实施例中,输入电阻器r1ain和r2ain可以是可变电阻器。反馈电阻器r5afb连接在放大器160a的非反相输入与放大器160a的反相输出之间。反馈电阻器r6afb连接在放大器160a的反相输入与放大器160a的非反相输出之间。反馈电阻器r5afb和r6afb具有相同的电阻值。驱动器电路还包括具有运算放大器160b的第二级,该运算放大器160b具有非反相输入和反相输入。输入电阻器r1bin被耦合在放大器160a的反相输出与放大器160b的非反相输入之间。输入电阻器r2bin被耦合在放大器160a的非反相输出与放大器160b的反相输入之间。输入电阻器r1bin和r2bin具有相同的电阻值。在实施例中,输入电阻器r1bin和r2bin可以是可变电阻器。反馈电阻器r5bfb连接在放大器160b的非反相输入与放大器160b的反相输出之间。反馈电阻器r6bfb连接在放大器160b的反相输入与放大器160b的非反相输出之间。反馈电阻器r5bfb和r6bfb具有相同的电阻值。
[0073]
利用该配置,施加到adc电路170的输入的输出电压vout(t)由以下等式给出:
[0074][0075]
其中:m可以被定义为用于m
‑
调制器的位数,其中2
m
是可以通过增益dac生成的电平的相关(最大)数目。因此,m是在具体情况下针对m
‑
dac而有效选择的电平的数目。因此,比率(m/2
m
)定义了通过m
‑
dac提供的增益因子。值k可以被定义为用于k调制器的位数,其中2
k
是可以通过偏移dac生成的电平的相关(最大)数目。因此,k是在具体情况下针对k
‑
dac而有效选择的电平的数目。因此,比率(k/2
k
)定义了通过k
‑
dac提供的因子(即,每个i
os
乘以一次的偏移电流的值)。vbias,ref是参考电压。gbias是可以施加到偏置驱动器104的增益。换言之,施加到传感器桥的偏置电压可以利用gbias值来编程。可以根据在消耗与噪声之间的折衷将桥偏置到不同的电压是有用的。g1是放大器160a的增益。g2是放大器160b的增益。不同的增益可以被选择,以便更好地利用模拟前端的动态范围。值j是用于桥偏置电流的镜像因子。值r0是参考温度处的电阻值。值α
r1
是如以上所提到的热系数。值δt是相对于参考温度的温度变化。值rtia是放大器152的反馈电阻器r3fb、r4fb的电阻。
[0076]
更具体地:
[0077][0078]
g2=常数,其中该常数的值取自为适当地与动态范围要求相符而选择的可能值的集合。
[0079]
运算放大器160a被用来补偿使用的vbias范围,并且运算放大器160b被用来补偿放大器152的反馈电阻器的技术扩散。
[0080]
在adc 170的输入处的vout(t)的表达式可以以更简化的形式被重写为:
[0081][0082]
其中:a、b和c是必须与比例因子m和k一起知道的三个系数,该比例因子m和k与adc电路170的动态范围最相符。校准过程可以被执行以确定针对比例因子m和k的最佳值。
[0083]
校准过程如下:
[0084]
a)从针对比例因子m和k的合理值(被称为m0和k0)开始,并且其中温度t处于参考温度t0(即,t=t0,并且因此δt=0),设置控制信号135和149以实现按m0和k0的缩放,并且根据以下等式对输出电压vout1(t)进行第一次测量:
[0085]
vout1=m0
·
a k0
·
c
[0086]
b)现在选择针对比例因子k的不同的合理值(被称为k1),并且其中温度t处于参考温度t0(即,t=t0,并且因此δt=0),设置控制信号135和149以实现按m0和k1的缩放,并且根据以下等式对输出电压vout2(t)进行第二次测量:
[0087]
vout2=m0
·
a k1
·
c
[0088]
c)求解线性系统:
[0089][0090]
其具有两个变量a和c以及两个等式以获得a和c。
[0091]
d)现在已知a和c,施加不同于t0的温度t(即,t≠t0并且因此存在δt),并且设置控制信号135和149以按m0和k1实现缩放以及根据以下等式对输出电压vout3(t)进行第三次测量:
[0092][0093]
其中除b之外所有项都是已知的。
[0094]
e)求解前述等式以获得b。
[0095]
f)现在已知a、b和c,通过求解线性系统,获得与adc电路170的动态范围最相符的m和k值:
[0096][0097]
其中:tmin是最低工作温度,以及tmax是最高工作温度,以确定比例因子mbest和kbest。然后,设置控制信号135和149以按mbest和kbest实现缩放,并且结束校准过程。
[0098]
一旦计算出参数a、b和c,用于定义输出电压的等式的所有“物理”参数是已知的。下一个要使用的m和k的值在任何情况下可以被自由选择。
[0099]
校准程序允许利用仅一个不同于室(参考)的温度测量来定义a、b和c,并且然后知道求解等式所需的所有物理值。
[0100]
如先前所提及的,m和k由用户/设计者设置。由于它们从开始是已知的,因此它们与等式不相关。m和k的值被简单选择,以及然后在等式中使用,并且可以被考虑到结果评估中。校准的关键点是提取a、b和c值。
[0101]
因此,问题在于一旦a、b和c被评估,必须如何选择m和k。想法是利用模拟前端中所有可用的动态范围。输出电压vout将受到模拟前端运算放大器152、160中的净空的限制。例如,清楚的是,vout将被限制在接地与运算放大器160电源电压之间。为了优化动态范围(即,改善信噪比),本领域技术人员可以设计系统,从而在工作范围中,vout将覆盖所有可用的电压范围。
[0102]
然后,m和k将因此被选择,从而针对tmin,它导致v(tmin)=min_voltage,以及针对tmax,它导致v(tmax)=mv(tmax)=max_voltage,其中min_voltage和max_voltage分别是可以由放大器160线性管理的最小电压和最大电压。因此,在数字域中,假设adc 170将在施加min_voltage时输出
‑
1的归一化结果并且在施加max_voltage时输出 1的归一化结果,相同的概念导致以上解决方案。
[0103]
现在参考图7,该图7示出了针对由adc电路170处理的模拟信号的颤动的框图。adc颤动电路172包括三角波生成器340,该三角波生成器340被配置为输出三角波信号342。三角波信号342被输入到1位西格玛
‑
德尔塔调制器344,该1位西格玛
‑
德尔塔调制器344输出经调制的信号346。经调制的信号146被输入到1位数模转换器(dac)电路348,该1位数模转换器(dac)电路348输出颤动信号350。
[0104]
adc电路170包括模拟求和电路360,该模拟求和电路360具有第一输入和第二输入,该第一输入从驱动器电路接收输出电压vout(t),该第二输入接收颤动信号350。模拟求和电路360的输出是三角颤动模拟输出电压信号362,该三角颤动模拟输出电压信号362被输入到逐次逼近寄存器(sar)adc转换器电路364。作为示例,sar adc转换器电路364可以是
生成12位数字信号366的12位电路。输出电压vout(t)的三角颤动的效果是在sar adc转换器电路364内的若干adc电平的一致激励。平均功能然后可以被用来对热噪声进行滤波并且提高信号分辨率到16位。作为示例,平均功能可以由n点平均器实现,其中n>2048。然后,来自adc电路170的数字输出信号由dsp电路180处理。
[0105]
图8示出了针对1位数模转换器(dac)电路348的电路图。1位西格玛
‑
德尔塔调制器344调制三角波信号342以生成经调制的信号346作为单个位信号dout以及其逻辑补充doutb。dac电路348包括第一电流源370,该第一电流源370被耦合在电源电压节点(vdd)与第一输入节点372之间。第一晶体管开关374被耦合在节点372与第一输出节点376之间,并且由信号dout驱动。第二晶体管开关378被耦合在节点372与第二输出节点380之间,并且由信号doutb驱动。第二电流源382被耦合在接地节点与第二输入节点384之间。第三晶体管开关386被耦合在节点384与第一输出节点376之间,并且由信号doutb驱动。第四晶体管开关388被耦合在节点384与第二输出节点380之间,并且由信号dout驱动。
[0106]
第一输出节点376被耦合到跨阻抗放大器390的第一输入。第二输出节点380被耦合到跨阻抗放大器390的第二输入。第一反馈电阻器rfb1被耦合在第一输入与跨阻抗放大器390的第一输出之间。第二反馈电阻器rfb2被耦合在第二输入与跨阻抗放大器390的第二输出之间。在跨阻抗放大器390的第一输出与跨阻抗放大器390的第二输出处生成的差分信号通过模拟求和电路360与来自驱动器电路的差分输出电压vout(t)求和。
[0107]
为了节约面积和功耗,优选的实施例将使用放大器160b以及电阻器r5bfb和r6bfb来提供放大器390以及电阻器rfb1和rfb2。换言之,在该实现方式中,输出节点376和380分别被耦合到放大器160b的非反相输入和反相输入。
[0108]
跨阻抗放大器390作为低通滤波器起作用。由于桥电路102的温度是慢频率信号,因此转换可以从n个样本(>2048)的平均来获得。平均时间必须是电路340生成的三角波形信号342的周期的整数倍。
[0109]
颤动信号是三角波形的(序列)。该信号在一个周期中具有等于零的平均值。因此,如果该信号被添加到在adc的输入处的有效信号,为了不改变有效信号本身的值,则adc结果必须在整数数目的三角波形周期上被平均。如在时域中所描述的,该操作在图9的频域中示出,该频域呈现通过有利地使用adc颤动来实现的频谱表示。信号400表示来自桥电路102的温度信号。信号402表示sar输入涉及的噪声。信号404表示三角颤动。频率fconv是adc转换频率。因此,频率f
conv
/2是公知的奈奎斯特频率。信号406表示由平均功能执行的滤波操作。信号408表示通过滤波操作降低的sar输入涉及的噪声。频率f
conv
/n是转换频率除以用于平均的样本数目n。在该背景中,将注意,sar输入涉及的噪声被降低图9图示了当等效滤波器功能被应用时如何降低(参加,图的下部分)adc的量化噪声(图的上部分)。如所示的,该滤波器功能是时域中平均的sinc(1)频率变换。sinc(1)理论规定将通过因子n来降低的等效带宽。
[0110]
现在参考图10,图10示出了dsp 180的框图。由adc电路170输出的数字信号vadc通过分数平均器操作420来处理,以产生平均数字信号avgout。被提供为到sar adc的输入的模拟信号可以被认为受到两种不同干扰的影响,该两种不同干扰将阻止dsp给出准确的结果。一种干扰由颤动噪声表示,该颤动噪声被添加到模拟信号以便提高adc分辨率,而另一
干扰由镜像的动作分量生成,该镜像的动作分量叠加在由模拟信号处理的电流信号处理链上(即,从桥电路到sar adc)。这些干扰必须被滤出以便防止它们影响dsp计算,因此确保dsp输出结果的最大准确性。分数平均器操作420因此执行该滤波功能。
[0111]
为了对两种干扰提供适当的滤波作用,一阶sinc滤波器证明非常合适,因为它可以以平均窗口恰好与整数个反射镜周期匹配的方式在理论上通过n个adc输出样本来平均。例如,如果sar adc的采样周期为ts(其中fs=1/ts),则根据公知的算式来执行n*ts平均窗口:
[0112][0113]
为了滤出颤动噪声和镜像动作分量二者,重要的是n*ts等于整数个镜像周期tm(其中fm=1/tm是镜像频率)。
[0114]
在任何常规的sinc滤波器中,平均数目n是整数值。然而,在该目前情况下,n也可以是小数。这在滤波应用中起关键作用,因为当总存在n的值时它允许使用具有相同fs的相同sar adc,使得针对m的一些整数值,n*ts等于m*tm。这使能支持感测任何mems反射镜,无论其振荡频率如何。这是利用对平均公式的少许修改而获得的,其中第一(i=1)和最后(i=n)样本在每个平均周期处被动态赋予小于整体的权重。权重从比率fs/fm的评估开始,在分数平均器操作420内部计算。每个权重符合样本贡献给平均窗口的时间量(小于一个样本时间)。这样做时,等效平均时间从常规的n*ts变为(w_left n
‑
2 w_right)*ts,其中w_left和w_right是上述权重。分数平均器操作420的可编程平均窗口因此适于所要求的输入/输出数据速率以便滤出颤动频谱分量,并且平均数字信号avgout的输出数据速率适于sar采样频率。
[0115]
如先前所提及的,依赖于温度的电阻被表示为:
[0116]
r(t)=r0(1 α
r1
·
δt α
r2
·
δt2)
[0117]
因此,归一化电阻为:
[0118][0119]
桥电流ibridge被定义为:
[0120][0121]
因此,归一化桥电流被定义为:
[0122][0123]
从adc电路170接收的输入可以被表示为:
[0124][0125]
其中:ibridge(t)是已知的;gcurr=m/(i*2
m
),其中m如以上所讨论的在校准期间被定义(与k一起);rtia是设置增益gtia的用于跨阻抗放大器的反馈电阻器的电阻;vref是设置用于sar dac的满量程的参考电压;以及ios是如先前所解释的消除偏移所必需的电流,该电流等于电流
‑
dac最低有效位的k倍,其中k如以上所讨论的在校准期间被定义(与m一起)。
[0126]
因此,电压vadc可以被表示为:
[0127][0128]
这表示dsp过程的开始点。
[0129]
针对ibridge
norm
求解上述等式揭示:
[0130][0131]
其中:
[0132]
以及
[0133][0134]
然后,响应于信号gdsp和osdsp,平均数字信号avgout通过dsp算法422来处理,以生成第一数字信号ibridge
norm
,该第一数字信号ibridge
norm
是根据以下流经桥电路102的归一化电流:
[0135]
ibridge
norm
=(vadc osdsp)
·
(gdsp)
[0136]
由于模拟设置在校准后是公知的,dsp利用用于gdsp和osdsp的值来编程。知道了这些值,通过桥电路102的归一化电流可以由由分数平均器输出的电压vadc的样本来计算。
[0137]
一旦归一化电流被确定,温度和灵敏度的倒数的计算是执行数学运算操作的关键。针对温度,必须求解将归一化桥电流与归一化电阻相关联的二阶等式。一旦温度是已知的,灵敏度的倒数值由以下来计算:
[0138][0139]
注意:由于在dsp中的值的定点表示,二阶等式的直接解可能导致错误和不稳定的结果。如将在本文中所讨论的,在执行计算中使用多个中间步骤是优选的。
[0140]
图11示出了dsp处理操作422的框图。现在提供对dsp算法的更深描述。
[0141]
在数字信号vadc通过分数平均器处理之后,信号vadc的样本(信号avgout)作为输入被提供给执行主处理算法的dsp块。算法的第一部分涉及输入与osdsp的求和(附图标记430)以及与gdsp的乘积结果(附图标记432)。如先前所解释的,这将产生第一数字信号,该第一数字信号是归一化桥电流(ibridge
norm
)。
[0142]
下一步是从归一化电流开始计算温度值。由于dsp仅实现定点计算,因此由1/ibridge
norm
=(1 α
r1
·
δt α
r2
·
δt2)给出的二阶等式的快速解将遭受舍入误差,该舍入误差将使结果错误或不稳定。针对该原因,通过定义一些仅取决于α系数的、并且已通过寄存器制为可编程的、而不是在运行时间中计算的中间值来操纵。这涉及多个步骤如下:
[0143]
a)归一化电流值被处理(附图标记434)以便计算其倒数值(1/x),该倒数值是归一化电阻(rbnorm);以及
[0144]
b)根据以下函数执行r2a过程(附图标记436),该r2a过程求解二阶等式以生成第二数字信号δtnorm:
[0145]
δtnorm=α
s1
·
δt
[0146]
其中:
[0147]
这里过程通过如下一些中间步骤来执行:i)计算rbnorm
–
1;ii)将步骤i)的结果与c2求和并且将结果乘以c1;iii)计算来自步骤ii)的结果的平方根;iv)将来自步骤iii)的结果乘以以及v)将步骤iv)的结果与
‑
c0求和。
[0148]
将注意,h、c0、c1、c2、c3是仅取决于机械系数的预计算系数,该机械系数转而是技术依赖性的。针对系数的等式如下:
[0149][0150][0151][0152][0153][0154]
其中:α
r1
是将桥电阻与温度相关联的一阶温度系数;α
r2
是将桥电阻与温度相关联的二阶温度系数;α
s1
是将灵敏度与温度相关联的一阶温度系数;以及α
s2
是将灵敏度与温度相关联的二阶温度系数。注意:在α
r
和α
s
系数之间不存在具体关系。
[0155]
一旦δtnorm=α
s1
·
δt乘积被计算,r2a过程(附图标记436)还计算1 α
s1
δt α
s2
δt2多项式的等价项:
[0156][0157]
该结果作为信号438来传递用于由1/x函数(附图标记440)进行的处理,该1/x函数起作用以计算值的倒数。结果是灵敏度s的倒数的值。将注意,灵敏度的倒数(即,1/s)而不是灵敏度(s)本身是用于进行灵敏度校正所必需的。针对这个的原因是vout=s(t)
·
σ(t)
·
vbia的灵敏度的倒数的乘法将直接给出mems的动作状态:
[0158][0159]
将注意,结果,仅保留了时变动作分量σ(t)和乘法常数。
[0160]
再次,如先前所提及的,dsp 180仅实现定点计算。因此,以上等式的快速解将遭受舍入误差,该舍入误差将使结果错误或不稳定。针对该原因,计算通过定义一些仅取决于α系数并且已通过寄存器制为可编程的而不是在运行时间中计算的中间值来操纵。
[0161]
然而,将理解,用于将电流的值直接映射到输出增益和温度的适合的多项式近似可以被代替使用。该解决方案的优势是降低了面积和计算工作量,用于更高效的设计。
[0162]
尽管已经在附图和前述描述中详细地图示和描述了本发明,但该图示和描述被认为是说明性的或示例性的而非限制性的;本发明不限于所公开的实施例。本发明不限于所公开的实施例。通过研究附图、公开和所附权利要求,本领域技术人员在实践所要求保护的
发明中可以理解和影响所公开的实施例的其他变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。