1.本发明涉及在相互排列配置的第1建造物与第2建造物之间输送物品的物品输送设备。
背景技术:
2.在这样的物品输送设备中,随着因外部气体温度的变动等而第1建造物及第2建造物稍稍变形,设置于第1建造物的第1输送装置和设置于第2建造物的第2输送装置的相对的位置关系变化,有变得难以在这些输送装置彼此间适当地交接物品的可能性。
3.在专利文献1(日本特开2004-84259号公报)中,公开了对在第1建造物(m)与第2建造物(n)之间输送物品的输送台车(1)进行导引的轨道装置。该轨道装置具备:第1轨道部(3),设置于第1建造物(m);第2轨道部(4),设置于第2建造物(n);以及第3轨道部(7),设置在这些轨道部之间,沿着轨道部的延伸方向(物品的输送方向)移动自如。而且,在第1轨道部(3)与第3轨道部(7)之间以及第2轨道部(4)与第3轨道部(7)之间,分别形成有规定的间隙(d2、d3)。这样,在专利文献1的轨道装置中,即使在因外部气体温度的变动等而第1轨道部(3)与第2轨道部(4)的间隔变化了的情况下,也借助第3轨道部(7)的移动和轨道部彼此的间隙(d2、d3)将对于输送台车(1)的行驶的影响抑制为较小。另外,在“背景技术”的说明中表示于括号内的附图标记是专利文献1的附图标记。
技术实现要素:
4.根据专利文献1所公开的技术,即使在因外部气体温度的变动等而第1输送装置与第2输送装置的间隔变化了的情况下,也能够在这些输送装置彼此间适当地交接物品。但是,根据第1建造物及第2建造物的构造等,有因外部气体温度的变动等而第1输送装置和第2输送装置的上下方向的位置偏差的可能性。在这样的情况下,在第1输送装置与第2输送装置之间形成阶差,所以变得难以在这些输送装置彼此间适当地交接物品。
5.所以,希望实现即使在因外部气体温度的变动等而第1输送装置和第2输送装置的上下方向的位置偏差的情况下也能够在第1输送装置与第2输送装置之间适当地交接物品的物品输送设备。
6.有关本公开的物品输送设备,是在相互排列配置的第1建造物与第2建造物之间输送物品的物品输送设备,具备:第1输送装置,设置于前述第1建造物,输送前述物品;第2输送装置,设置于前述第2建造物,输送前述物品并且在与前述第1输送装置之间进行前述物品的交接;升降机构,使前述第1输送装置相对于前述第2输送装置升降;位置检测装置,检测前述第1输送装置相对于前述第2输送装置的相对的位置关系;升降控制装置,对前述升降机构进行控制;以及检测控制装置,对前述位置检测装置进行控制;前述位置检测装置包括对象体和检测器,所述对象体在相对于前述第2输送装置的相对位置被固定的状态下被支承,所述检测器在相对于前述第1输送装置的相对位置被固定的状态下被支承,检测前述对象体;前述检测控制装置基于由前述检测器得到的检测结果,计算上下偏差量,所述上下
偏差量是前述第1输送装置相对于前述第2输送装置的上下方向的偏差量;前述升降控制装置基于前述上下偏差量,进行第1升降控制,所述第1升降控制是使前述升降机构将前述第1输送装置升降、以使前述第1输送装置的输送面与前述第2输送装置的输送面的前述上下方向的位置一致的控制。
7.根据该特征结构,基于在相对于第1输送装置的相对位置被固定的状态下被支承的检测器对在相对于第2输送装置的相对位置被固定的状态下被支承的对象体进行检测的结果,检测控制装置计算第1输送装置相对于第2输送装置的上下偏差量。然后,升降控制装置基于由检测控制装置计算出的上下偏差量,进行第1升降控制,所述第1升降控制是使升降机构将第1输送装置升降、以使第1输送装置的输送面与第2输送装置的输送面的上下方向的位置一致的控制。由此,即使在因外部气体温度的变动等而第1输送装置和第2输送装置的上下方向的位置偏差的情况下,也能够使第1输送装置的输送面和第2输送装置的输送面的上下方向的位置一致,所以能够在第1输送装置与第2输送装置之间适当地交接物品。此外,由于检测器在相对于第1输送装置的相对位置被固定的状态下被支承,所以能够不经由无线收发机而进行用来基于由检测器得到的检测结果进行升降机构的第1升降控制的信号的交接。由此,容易使物品输送设备的结构简略化。
附图说明
8.图1是有关实施方式的物品输送设备的侧面剖视图。
9.图2是表示有关实施方式的物品输送设备的主要部的侧面剖视图。
10.图3是表示有关实施方式的物品输送设备的主要部的俯视图。
11.图4是表示对象体及检测器的构造的俯视图。
12.图5是图4的v-v剖视图。
13.图6是图4的vi-vi剖视图。
14.图7是图4的vii-vii剖视图。
15.图8是表示有关实施方式的物品输送设备的结构的框图。
16.图9是表示对象面距离与上下偏差量的关系的图。
具体实施方式
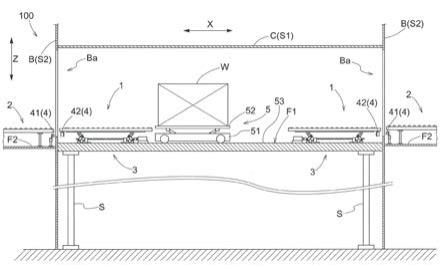
17.以下,参照附图对有关实施方式的物品输送设备100进行说明。如图1所示,物品输送设备100是在相互排列配置的第1建造物s1与第2建造物s2之间输送物品w的设备。
18.在以下的说明中,将物品w被输送的方向设为“输送方向x”。而且,将在俯视下与输送方向x正交的方向设为“宽度方向y(参照图3)”。此外,将沿着铅直方向的方向设为“上下方向z”。
19.在本实施方式中,在分别相当于第2建造物s2的一对建筑物b之间,配置有相当于第1建造物s1的穿廊c。穿廊c被多个架台s支承。穿廊c被形成为跨一对建筑物b沿着输送方向x延伸的筒状。在一对建筑物b的各自以与穿廊c对置的方式形成有物品w能够穿过的开口部ba。而且,一对建筑物b的各自经由开口部ba而与穿廊c连通。
20.如图1所示,物品输送设备100具备:第1输送装置1,设置于第1建造物s1,输送物品w;第2输送装置2,设置于第2建造物s2,输送物品w并且在与第1输送装置1之间进行物品w的
交接;升降机构3,使第1输送装置1相对于第2输送装置2升降;以及位置检测装置4,检测第1输送装置1相对于第2输送装置2的相对的位置关系。
21.在本实施方式中,在穿廊c,相互在输送方向x上离开而设有一对第1输送装置1。此外,在本实施方式中,在一对建筑物b的各自设有第2输送装置2。而且,以一方的第1输送装置1与一方的第2输送装置2夹着一方的开口部ba对置、并且另一方的第1输送装置1与另一方的第2输送装置2夹着另一方的开口部ba对置的方式配置。
22.如图2所示,第1输送装置1构成为,将物品w从下方支承而输送该物品w。在本实施方式中,第1输送装置1是具备具有沿着宽度方向y的轴心的多个第1辊11和将该多个第1辊11能够绕前述轴心旋转地支承的第1框架12的辊式输送机。通过由第1辊驱动部11a(参照图8)将被第1框架12支承的多个第1辊11绕沿着宽度方向y的轴心旋转驱动,将载置于第1辊11上的物品w在输送方向x上输送。
23.第2输送装置2构成为,将物品w从下方支承而将该物品w输送。在本实施方式中,第2输送装置2是具备具有沿着宽度方向y的轴心的多个第2辊21和将该多个第2辊21能够绕前述轴心旋转地支承的第2框架22的辊式输送机。通过由第2辊驱动部21a(参照图8)将被第2框架22支承的多个第2辊21绕沿着宽度方向y的轴心旋转驱动,将载置于第2辊21上的物品w在输送方向x上输送。在本实施方式中,第2框架22被支承部件23从下方支承,所述支承部件23固定在作为建筑物b的地面的建筑物地面f2。
24.如图3所示,在本实施方式中,在一对第1输送装置1的各自,将1个第1框架12和被该第1框架12支承的多个第1辊11在宽度方向y上隔开间隔设置2组。进而,在本实施方式中,在一对第2输送装置2的各自,将1个第2框架22和被该第2框架22支承的多个第2辊21在宽度方向y上隔开间隔设置2组。
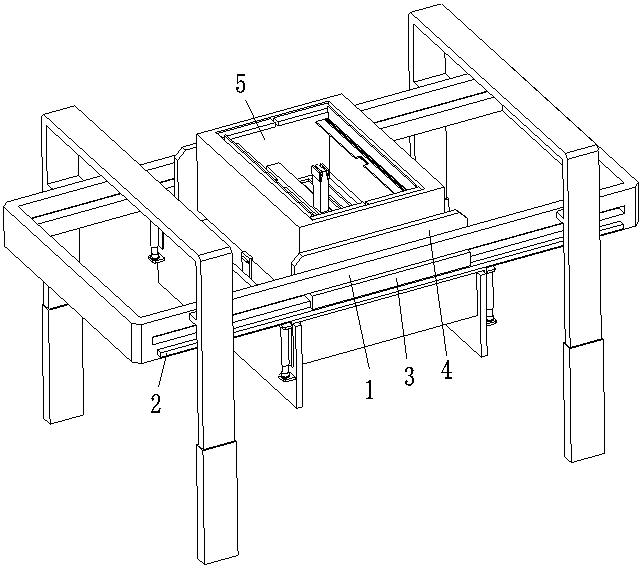
25.如图2所示,在本实施方式中,为了使一对第1输送装置1的各自升降,在穿廊c设有一对升降机构3。在本实施方式中,一对升降机构3被设置于作为穿廊c的地面的廊地面f1。
26.此外,在本实施方式中,升降机构3具备分别使第1输送装置1的第1框架12升降的一对升降部3a。在本实施方式中,一对升降部3a的各自具备:滚珠丝杠31,沿着输送方向x延伸,形成有相互不同朝向的一对螺纹牙部;一对移动体32,分别与滚珠丝杠31的朝向不同的螺纹牙部螺合;连杆机构33,分别将移动体32与第1输送装置1的第1框架12连结;以及升降驱动部34,使滚珠丝杠31旋转。在这样构成的升降部3a中,如果借助升降驱动部34而滚珠丝杠31旋转,则对应于该滚珠丝杠31的旋转方向而一对移动体32相互接近或远离,随之经由连杆机构33而第1框架12升降移动。这样,通过使一对升降部3a的动作同步,能够在将第1输送装置1的输送面保持为水平的状态下使第1输送装置1相对于第2输送装置2升降。
27.如图1所示,在本实施方式中,物品输送设备100还具备第3输送装置5。第3输送装置5设置于第1建造物s1。第3输送装置5输送物品w,并且在与第2输送装置2不同的场所在与第1输送装置1之间进行物品w的交接。
28.在本实施方式中,第3输送装置5具备:行驶台车51,沿着输送方向x在沿着穿廊c的廊地面f1设置的行驶路53行驶;以及升降台52,相对于该行驶台车51升降并且将物品w从下方支承。
29.如图3所示,在本实施方式中,第3输送装置5构成为,能够在第1输送装置1的一对第1框架12的宽度方向y之间行驶。在本实施方式中,第3输送装置5在从第1输送装置1接受
物品w的情况下,在使升降台52位于比支承着物品w的第1输送装置1的输送面低的位置的状态下,行驶到第1输送装置1的一对第1框架12的宽度方向y之间之后,使升降台52上升到比第1输送装置1的输送面高的位置。这样,第3输送装置5通过将第1输送装置1上的物品w从下方支承,能够从第1输送装置1接受物品w。此外,第3输送装置5在向第1输送装置1移交物品w的情况下,在使支承着物品w的升降台52比第1输送装置1的输送面高的状态下,行驶到第1输送装置1的一对第1框架12的宽度方向y之间之后,使升降台52下降到比第1输送装置1的输送面低的位置。这样,第3输送装置5通过将支承着的物品w卸下到第1输送装置1上,能够将物品w向第1输送装置1移交。
30.如图2及图3所示,位置检测装置4包括对象体41和检测该对象体41的检测器42。
31.对象体41在相对于第2输送装置2的相对位置被固定的状态下被支承。在本实施方式中,对象体41经由托架41a被固定在建筑物b的建筑物地面f2。由此,能够将起因于借助第2输送装置2的物品w的输送的振动的影响抑制为较小,所以检测器42能够适当地进行对象体41的检测。
32.检测器42在相对于第1输送装置1的相对位置被固定的状态下被支承。在本实施方式中,检测器42经由固定部件42a被固定于第1输送装置1的第1框架12。
33.如图4所示,在本实施方式中,对象体41包括第1对象体41a、第2对象体41b和第3对象体41c。第1对象体41a、第2对象体41b及第3对象体41c相互在宽度方向y上隔开间隔排列而配置。在图示的例子中,在宽度方向y上的第1对象体41a与第3对象体41c之间配置有第2对象体41b。
34.此外,在本实施方式中,检测器42包括第1检测器42a、第2检测器42b和第3检测器42c。第1检测器42a、第2检测器42b及第3检测器42c相互在宽度方向y上隔开间隔排列而配置。在图示的例子中,在宽度方向y上的第1检测器42a与第3检测器42c之间配置有第2检测器42b。
35.在本实施方式中,第1对象体41a和第1检测器42a在输送方向x上排列配置。而且,第2对象体41b和第2检测器42b在输送方向x上排列配置。进而,第3对象体41c和第3检测器42c在输送方向x上排列配置。因此,在本例中,第1检测器42a和第2检测器42b的宽度方向y的配置间隔(间距)以及第2检测器42b和第3检测器42c的宽度方向y的配置间隔(间距),分别被设定为与第1对象体41a和第2对象体41b的宽度方向y的配置间隔(间距)以及第2对象体41b和第3对象体41c的宽度方向y的配置间隔(间距)相同。
36.在本实施方式中,第1检测器42a是计测第1对象面距离l1的设备,所述第1对象面距离l1是到形成于第1对象体41a的第1对象面41aa的距离。而且,第2检测器42b是计测第2对象面距离l2的设备,所述第2对象面距离l2是到形成于第2对象体41b的第2对象面41ba的距离。进而,第3检测器42c是计测第3对象面距离l3的设备,所述第3对象面距离l3是到形成于第3对象体41c的第3对象面41ca的距离。在本例中,第1检测器42a、第2检测器42b及第3检测器42c的各自是朝向对象物(这里是第1对象面41aa、第2对象面41ba、第3对象面41ca)照射激光、基于其反射光计测到对象物的距离的激光距离计。
37.如图4及图5所示,第1对象面41aa以随着朝向上下方向z的一方侧而第1对象面距离l1变化的方式倾斜形成。在图示的例子中,第1对象面41aa以随着朝向上方而第1对象面距离l1增加的方式,相对于水平面以45
°
的角度倾斜。
38.如图4及图6所示,第2对象面41ba以随着朝向宽度方向y的一方侧而第2对象面距离l2变化的方式倾斜形成。在图示的例子中,第2对象面41ba以随着从宽度方向y上的第1对象体41a侧朝向第3对象体41c而第2对象面距离l2增加的方式,在俯视下相对于宽度方向y以45
°
的角度倾斜。
39.如图4及图7所示,第3对象面41ca以相对于输送方向x正交的方式形成。因此,在第3对象面41ca中,第3对象面距离l3不根据场所而变化。
40.如图8所示,物品输送设备100具备对升降机构3进行控制的升降控制装置6和对位置检测装置4进行控制的检测控制装置7。在本实施方式中,物品输送设备100还具备输送控制装置8。输送控制装置8对第1输送装置1及第2输送装置2进行控制。在本实施方式中,输送控制装置8也对第3输送装置5进行控制。检测控制装置7构成为,能够与升降控制装置6及输送控制装置8的各自收发信号。
41.在本实施方式中,升降控制装置6通过对升降机构3的升降驱动部34进行控制,使第1输送装置1升降。此外,输送控制装置8通过对用来驱动多个第1辊11的第1辊驱动部11a进行控制,使借助第1输送装置1的物品w的输送状态变化。而且,输送控制装置8通过对用来驱动多个第2辊21的第2辊驱动部21a进行控制,使借助第2输送装置2的物品w的输送状态变化。进而,输送控制装置8通过对用来驱动第3输送装置5的行驶台车51的车轮的行驶台车驱动部51a进行控制,使行驶台车51的行驶状态变化。而且,输送控制装置8通过对用来将第3输送装置5的升降台52升降的升降台驱动部52a进行控制,使升降台52相对于行驶台车51升降。
42.如图9所示,检测控制装置7基于由检测器42得到的检测结果,计算作为第1输送装置1相对于第2输送装置2的上下方向z的偏差量的上下偏差量d。在本实施方式中,检测控制装置7基于作为由第1检测器42a得到的检测结果的第1对象面距离l1计算上下偏差量d。
43.升降控制装置6基于上下偏差量d,进行第1升降控制,所述第1升降控制是使升降机构3将第1输送装置1升降、以使作为第1输送装置1的输送面的第1输送面1a与作为第2输送装置2的输送面的第2输送面2a的上下方向z的位置一致的控制。第1升降控制例如在即将在第1输送装置1与第2输送装置2之间进行物品w的交接之前进行。在本实施方式中,第1输送面1a是经过多个第1辊11的上端的假想面。此外,第2输送面2a是经过多个第2辊21的上端的假想面。
44.如图9所示,将第1输送面1a与第2输送面2a的上下方向z的位置一致的状态下的第1对象面距离l1设为“基准距离l1a”,将第1输送面1a相对于第2输送面2a偏差的状态下的第1对象面距离l1设为“变位距离l1b”。此时,在本实施方式中,第1对象面41aa以一定的角度(这里是45
°
)倾斜,所以能够基于基准距离l1a与变位距离l1b的差来计算伴随着第1输送面1a相对于第2输送面2a偏差而发生的上下偏差量d。另外,在图示的例子中,变位距离l1b是第1输送面1a位于比第2输送面2a靠下方的状态下的第1对象面距离l1。而且,由于第1对象面41aa以随着朝向上方而第1对象面距离l1增加的方式倾斜,所以变位距离l1b比基准距离l1a小(lb1<l1a)。另外,在本例中,由于将第1对象面41aa相对于水平面的倾斜角度设为45
°
,所以基准距离l1a与变位距离l1b的第1对象面距离l1的差和上下偏差量d成为相同的值。由此,借助升降机构3的升降量的控制变得容易。
45.在本实施方式中,检测控制装置7与上下偏差量d的计算同样,基于作为由第2检测
器42b得到的检测结果的第2对象面距离l2,计算作为第1输送装置1相对于第2输送装置2的宽度方向y的偏差量的宽度偏差量。由于根据第1输送装置1相对于第2输送装置2的宽度方向y的相对位置而第2对象面距离l2变化,所以能够基于该第2对象面距离l2来计算宽度偏差量。在本实施方式中,在宽度偏差量比规定的阈值大的情况下,检测控制装置7将错误输出,输送控制装置8使全部的输送装置1、2、5停止。
46.此外,在本实施方式中,检测控制装置7与上下偏差量d的计算同样,基于作为由第3检测器42c得到的检测结果的第3对象面距离l3,计算作为第1输送装置1相对于第2输送装置2的输送方向x的偏差量的前后偏差量lx。由于根据第1输送装置1相对于第2输送装置2的输送方向x的相对位置而第3对象面距离l3变化,所以能够基于该第3对象面距离l3来计算前后偏差量lx。在本实施方式中,检测控制装置7基于该前后偏差量lx的计算结果,进行上下偏差量d的计算结果的修正。即,将求出了作为第1对象面距离l1的理想的基准距离l1a的理想基准距离l1ai时的第3对象面距离l3设为基准前后距离l3a,计算前后偏差量lx。这里,第3对象面距离l3的检测结果与基准前后距离l3a的差量成为前后偏差量lx(lx=l3-l3a)。然后,检测控制装置7将对理想基准距离l1ai加上该时点的前后偏差量lx后的值设为该时点的基准距离l1a(l1a=l1ai lx)。然后,使用该基准距离l1a计算上下偏差量d。由此,能够计算出排除了由前后偏差量lx带来的影响的上下偏差量d。另外,在本例中,由于第3对象面41ca是相对于输送方向x正交的平面,所以第3对象面距离l3和前后偏差量lx成为相同的值。由此,前后偏差量lx的计算变得容易。此外,在本实施方式中,在前后偏差量lx比规定的阈值大的情况下,检测控制装置7将错误输出,输送控制装置8使全部的输送装置1、2、5停止。
47.如上述那样,检测器42在相对于第1输送装置1的相对位置被固定的状态下被支承。因此,能够不经由无线收发机而进行用来基于由检测器42得到的检测结果进行升降机构3的第1升降控制的信号的交接。具体而言,由于检测器42、升降机构3、检测控制装置7及升降控制装置6全部被配置于第1建造物s1(这里是穿廊c),所以能够将检测控制装置7与升降控制装置6有线连接。由此,容易使物品输送设备100的结构简略化。
48.在本实施方式中,升降控制装置6除了上述的第1升降控制以外还进行第2升降控制。第2升降控制是使升降机构3将第1输送装置1升降、以使第1输送装置1的上下方向z的位置成为能够在第1输送装置1与第3输送装置5之间交接物品w的位置的控制。在本例中,在第2升降控制中,使第1输送装置1升降,以使第1输送装置1的输送面成为第3输送装置5的升降台52的升降范围的中央位置。另外,在第3输送装置5不是如本实施方式那样具备行驶台车51及升降台52的输送车、而是第1输送装置1及第2输送装置2那样的输送机的情况下,升降控制装置6作为第2升降控制,进行使升降机构3将第1输送装置1升降以使第1输送装置1的第1输送面1a与第3输送装置5的输送面的上下方向z的位置一致的控制。
49.在本实施方式中,检测控制装置7在输送控制装置8使第1输送装置1及第2输送装置2停止的状态下,使借助检测器42的检测进行。具体而言,在将物品w在第1输送装置1上朝向第2输送装置2输送的情况下,在物品w处于第1输送装置1上的状态下,暂且将第1输送装置1及第2输送装置2停止,进行借助检测器42的检测,然后再开始借助第1输送装置1的输送。此外,在将物品w在第2输送装置2上朝向第1输送装置1输送的情况下,在物品w处于第2输送装置2上的状态下,暂且将第1输送装置1及第2输送装置2停止,进行借助检测器42的检
测,然后再开始借助第1输送装置1的输送。这里,检测控制装置7在输送控制装置8使第1输送装置1及第2输送装置2停止的状态下,使第1检测器42a计测第1对象面距离l1,使第2检测器42b计测第2对象面距离l2,使第3检测器42c计测第3对象面距离l3。
50.〔其他的实施方式〕(1)在上述的实施方式中,以由第1检测器42a计测作为到形成于第1对象体41a的第1对象面41aa的距离的第1对象面距离l1、基于该第1对象面距离l1计算上下偏差量d的结构为例进行了说明。但是,并不限定于这样的结构,例如也可以做成检测器42借助图像识别处理来检测对象体41的上下方向z的位置、基于该图像识别结果计算上下偏差量d的结构。
51.(2)在上述的实施方式中,以对象体41包括第1对象体41a、第2对象体41b和第3对象体41c的结构为例进行了说明。但是,并不限定于这样的结构,只要至少设有第1对象体41a就可以。即,也可以除了第1对象体41a以外还设有第2对象体41b及第3对象体41c的某一方,也可以仅设有第1对象体41a。
52.(3)在上述的实施方式中,以对象体41被固定于建筑物b的建筑物地面f2的结构为例进行了说明。但是,并不限定于这样的结构,例如也可以做成对象体41被固定于第2输送装置2的第2框架22的结构。
53.(4)上述的实施方式中,以检测控制装置7在输送控制装置8使第1输送装置1及第2输送装置2停止的状态下使借助检测器42的检测进行的结构为例进行了说明。但是,并不限定于这样的结构,也可以做成检测控制装置7在第1输送装置1及第2输送装置2动作的状态下使借助检测器42的检测进行的结构。
54.(5)另外,在上述的各实施方式中公开的结构只要不发生矛盾,也可以与在其他的实施方式中公开的结构组合而应用。关于其他的结构,在本说明书中公开的实施方式在全部的方面都不过是单单的例示。因而,在不脱离本公开的主旨的范围内能够适当进行各种改变。
55.〔上述实施方式的概要〕以下,对在上述中说明的物品输送设备的概要进行说明。
56.物品输送设备是在相互排列配置的第1建造物与第2建造物之间输送物品的物品输送设备,具备:第1输送装置,设置于前述第1建造物,输送前述物品;第2输送装置,设置于前述第2建造物,输送前述物品并且在与前述第1输送装置之间进行前述物品的交接;升降机构,使前述第1输送装置相对于前述第2输送装置升降;位置检测装置,检测前述第1输送装置相对于前述第2输送装置的相对的位置关系;升降控制装置,对前述升降机构进行控制;以及检测控制装置,对前述位置检测装置进行控制;前述位置检测装置包括对象体和检测器,所述对象体在相对于前述第2输送装置的相对位置被固定的状态下被支承,所述检测器在相对于前述第1输送装置的相对位置被固定的状态下被支承,检测前述对象体;前述检测控制装置基于由前述检测器得到的检测结果,计算上下偏差量,所述上下偏差量是前述第1输送装置相对于前述第2输送装置的上下方向的偏差量;前述升降控制装置基于前述上下偏差量,进行第1升降控制,所述第1升降控制是使前述升降机构将前述第1输送装置升降、以使前述第1输送装置的输送面与前述第2输送装置的输送面的前述上下方向的位置一致的控制。
57.根据该结构,基于在相对于第1输送装置的相对位置被固定的状态下被支承的检
测器对在相对于第2输送装置的相对位置被固定的状态下被支承的对象体进行检测的结果,检测控制装置计算第1输送装置相对于第2输送装置的上下偏差量。然后,升降控制装置基于由检测控制装置计算出的上下偏差量,进行第1升降控制,所述第1升降控制是使升降机构将第1输送装置升降、以使第1输送装置的输送面与第2输送装置的输送面的上下方向的位置一致的控制。由此,即使在因外部气体温度的变动等而第1输送装置和第2输送装置的上下方向的位置偏差的情况下,也能够使第1输送装置的输送面和第2输送装置的输送面的上下方向的位置一致,所以能够在第1输送装置与第2输送装置之间适当地交接物品。此外,由于检测器在相对于第1输送装置的相对位置被固定的状态下被支承,所以能够不经由无线收发机而进行用来基于由检测器得到的检测结果进行升降机构的第1升降控制的信号的交接。由此,容易使物品输送设备的结构简略化。
58.这里,优选的是,将前述物品被输送的方向设为输送方向;前述对象体和前述检测器在前述输送方向上排列配置;前述检测器计测对象面距离,所述对象面距离是到形成于前述对象体的对象面的距离;前述对象面以随着朝向前述上下方向的一方侧而前述对象面距离变化的方式倾斜形成。
59.根据该结构,在对象体形成有对象面,所述对象面以随着朝向上下方向的一方侧而输送方向上的距检测器的距离变化的方式倾斜,检测器计测到该对象面的距离。因此,检测控制装置能够基于由检测器计测出的对象面距离来计算上下偏差量。即,通过计测从检测器到对象面的输送方向的距离,能够计算上下偏差量。因而,根据本结构,能够以简易的结构使第1输送装置的输送面和第2输送装置的输送面的上下方向的位置一致。
60.此外,优选的是,还具备第3输送装置,所述第3输送装置设置于前述第1建造物,输送前述物品,并且在与前述第2输送装置不同的场所在与前述第1输送装置之间进行前述物品的交接;前述升降控制装置除了前述第1升降控制以外还进行第2升降控制,所述第2升降控制是使前述升降机构将前述第1输送装置升降、以使前述第1输送装置的前述上下方向的位置成为能够在前述第1输送装置与前述第3输送装置之间交接前述物品的位置的控制。
61.如上述那样,由于第1输送装置设置于第1建造物,第2输送装置设置于第2建造物,所以因外部气体温度的变动等而这些输送装置的上下方向的相对位置变化。另一方面,第3输送装置由于与第1输送装置同样设置于第1建造物,所以不会因外部气体温度的变动等而相对于第1输送装置的上下方向的相对位置变化。因此,在借助第1升降控制使第1输送装置的输送面与第2输送装置的输送面的上下方向的位置一致的情况下,有不能在第1输送装置与第3输送装置之间适当地交接物品的可能性。但是,根据本结构,由于升降控制装置除了第1升降控制以外还进行第2升降控制,所以能够在第1输送装置与第2输送装置之间适当地交接物品,并且能够在第1输送装置与第3输送装置之间也适当地交接物品。
62.此外,优选的是,还具备输送控制装置,所述输送控制装置对前述第1输送装置及前述第2输送装置进行控制;前述检测控制装置在前述输送控制装置使前述第1输送装置及前述第2输送装置停止的状态下,使借助前述检测器的检测进行。
63.根据该结构,能够不受到起因于借助第1输送装置及第2输送装置的物品的输送的振动的影响而检测器适当地进行对象体的检测。因而,能够将上下偏差量的误差抑制为较小。
64.上述的结构优选的是,前述第1建造物是穿廊,所述穿廊被架台支承以位于相互离
开而配置的一对前述第2建造物之间。这是因为,在这样的结构中,因外部气体温度的变动等而架台伸缩,随之第1建造物在上下方向上变位,由此,第1输送装置和第2输送装置的上下方向的位置容易偏差。
65.产业上的可利用性有关本公开的技术能够利用于在相互排列配置的第1建造物与第2建造物之间输送物品的物品输送设备。
66.附图标记说明100 :物品输送设备1
ꢀꢀꢀ
:第1输送装置1a
ꢀꢀ
:第1输送面2
ꢀꢀꢀ
:第2输送装置2a
ꢀꢀ
:第2输送面3
ꢀꢀꢀ
:升降机构4
ꢀꢀꢀ
:位置检测装置41
ꢀꢀ
:对象体41a :第1对象体41aa:第1对象面(对象面)6
ꢀꢀꢀ
:升降控制装置7
ꢀꢀꢀ
:检测控制装置l1
ꢀꢀ
:第1对象面距离(对象面距离)s1
ꢀꢀ
:第1建造物s2
ꢀꢀ
:第2建造物w
ꢀꢀꢀ
:物品。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。