1.本发明涉及翻车机技术领域,具体而言,尤其涉及一种集装箱翻车机清料过桥。
背景技术:
2.铁路敞车的残料一般是在翻卸后,将空车推到空车线上,工人从车厢边上的旁门进入敞车内部进行清料。
3.铁路运输集装箱目前在国际上逐步成为一个主流,我公司研发的铁路敞顶集装箱及敞车两用翻车机技术,可实现通过向侧面翻卸敞顶集装箱将物料卸出。
4.集装箱的翻卸作业面临的一个问题是:集装箱的高度为近3米高,且没有旁门。如翻卸后的集装箱内因为冻料、粘料等原因存有剩余的物料,工人很难进入集装箱,也很难采用敞车的清料办法从旁门清理残存物料。
5.残存物料的存在,成为制约集装箱翻卸作业的瓶颈。
技术实现要素:
6.根据上述提出的技术问题,而提供一种配合翻车机可让人工可进入到翻卸后容器中进行清理的设备。
7.本发明采用的技术手段如下:
8.一种集装箱翻车机清料过桥,包括:支撑机构,固定于地面上;悬臂俯仰机构,固定在支撑机构上;以及俯仰驱动机构,用于驱动悬臂俯仰机构的俯仰部分进行俯仰动作;悬臂俯仰机构的悬臂部分为进行俯仰动作的俯仰部分,悬臂部分的前端在工作状态与翻转到预设角度的集装箱或者敞车的敞口部分连接,连接程度允许工人进入到集装箱或者敞车内部;
9.上述的工作状态为悬臂部分前端伸入或者搭接在翻转到预设角度的集装箱或者敞车的敞口内,即支撑机构与俯仰驱动机构在悬臂部分的工作状态下实现形成地面到集装箱或者敞车内部的连接通道。
10.更为具体的,
11.支撑机构为:框架结构的清料过桥地面支架,为主要支撑件;
12.悬臂俯仰机构包括:过桥上部驱动架、过桥走台和过桥竖向驱动连杆;
13.过桥走台为悬臂俯仰机构的悬臂部分;
14.清料过桥地面支架上设有过桥上部驱动架的铰点以及件过桥走台的铰点;
15.过桥竖向驱动连杆,是将过桥上部驱动架的动作传递到过桥走台的件,其上端通过过桥上部驱动架的前铰点同过桥上部驱动架铰接,其下部通过过桥走台的前铰点同过桥走台相铰接;
16.俯仰驱动机构能够驱动过桥上部驱动架绕其与清料过桥地面支架的铰点旋转,最终带动过桥走台进行俯仰动作。
17.进一步的,
18.上述俯仰驱动机构为过桥驱动缸,是清料过桥的动力元件,后端连接在清料过桥地面支架预设的过桥驱动缸的铰点上,前端连接在过桥上部驱动架上,通过其伸长及缩短,实现过桥走台的抬起及放下。
19.进一步的,还包括:
20.过桥竖向辅助连杆和过桥横向辅助连杆;
21.过桥竖向辅助连杆同过桥上部驱动架及过桥走台相铰接;
22.过桥横向辅助连杆同过桥竖向驱动连杆及过桥竖向辅助连杆相铰接。
23.进一步的,
24.上述过桥驱动缸的控制装置与翻车机的翻转角度控制装置数据互相联通,能够进行联动配合,进而可以根据设定的翻车机翻转的角度对过桥走台的放下动作进行合理的控制,形成更为有效的联动,为以后进行智能化控制做基础。
25.采用上述技术方案的本发明,在翻车机的倾翻侧的地面,增加集装箱清料过桥,在翻车机翻转一定角度,使得集装箱上口位于侧面位置后,该过桥可自动搭接到或停放与翻卸后的集装箱上口,工人可以通过该过桥进入集装箱,对集装箱内的物料进行清理。
26.较现有技术相比,本发明具有以下优点:
27.1、结构简单,架设成本低。
28.2、采用成熟结构运行稳定,且维护成本低。
29.3、可与翻车机实现自动联动,减少人工控制步骤,提高作业效率。
附图说明
30.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
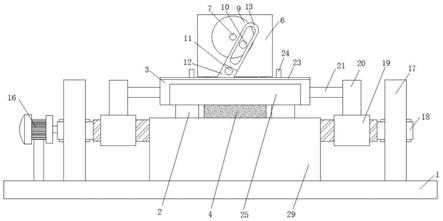
31.图1为本发明清料过桥抬起允许翻集装箱状态截面图。
32.图2为本发明清料过桥放下同集装箱搭接,允许过人清料状态截面图。
33.图中:1、清料过桥地面支架;2、过桥驱动缸;3、过桥上部驱动架;4、过桥走台;5、过桥竖向驱动连杆;6、过桥竖向辅助连杆;7、过桥横向辅助连杆;8、集装箱压头;9、敞顶集装箱;10、过桥驱动缸的后铰点;11、过桥驱动缸的前铰点;12、过桥上部驱动架的后铰点;13、过桥上部驱动架的前铰点;14、过桥走台的后铰点;15、过桥走台的前铰点。
具体实施方式
34.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
35.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属
于本发明保护的范围。
36.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
37.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当清楚,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员己知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任向具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
38.在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制:方位词“内、外”是指相对于各部件本身的轮廓的内外。
39.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其位器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
40.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
41.如图1和图2所示,本发明提供了一种集装箱翻车机清料过桥,包括:支撑机构,固定于地面上;悬臂俯仰机构,固定在支撑机构上;以及俯仰驱动机构,用于驱动悬臂俯仰机构的俯仰部分进行俯仰动作;悬臂俯仰机构的悬臂部分为进行俯仰动作的俯仰部分,悬臂部分的前端在工作状态与翻转到预设角度的集装箱或者敞车的敞口部分连接,连接程度允许工人进入到集装箱或者敞车内部;
42.上述的工作状态为悬臂部分前端伸入或者搭接在翻转到预设角度的集装箱或者敞车的敞口内,即支撑机构与俯仰驱动机构在悬臂部分的工作状态下实现形成地面到集装箱或者敞车内部的连接通道。
43.更为具体的,
44.支撑机构为:框架结构的清料过桥地面支架1,为主要支撑件;
45.悬臂俯仰机构包括:过桥上部驱动架3、过桥走台4和过桥竖向驱动连杆5;
46.过桥走台4为悬臂俯仰机构的悬臂部分;
47.清料过桥地面支架1上设有过桥上部驱动架3的铰点以及件过桥走台4的铰点;
48.过桥竖向驱动连杆5,是将过桥上部驱动架3的动作传递到过桥走台4的件,其上端通过过桥上部驱动架的前铰点13同过桥上部驱动架3铰接,其下部通过过桥走台的前铰点15同过桥走台4相铰接;
49.俯仰驱动机构能够驱动过桥上部驱动架3绕其与清料过桥地面支架1的铰点旋转,最终带动过桥走台4进行俯仰动作。
50.进一步的,
51.上述俯仰驱动机构为过桥驱动缸2,是清料过桥的动力元件,后端连接在清料过桥地面支架1预设的过桥驱动缸2的铰点上,前端连接在过桥上部驱动架3上,通过其伸长及缩短,实现过桥走台4的抬起及放下;此处俯仰驱动机构采用方案是线性伸缩的伸缩缸结构,也可应用卷扬钢丝绳这类牵引功能的机构来实现上部驱动架3的驱动。
52.进一步的,还包括:
53.过桥竖向辅助连杆6和过桥横向辅助连杆7;
54.过桥竖向辅助连杆6同过桥上部驱动架3及过桥走台4相铰接;过桥竖向辅助连杆6,其作用是为工人提供侧面保护;
55.过桥横向辅助连杆7同过桥竖向驱动连杆5及过桥竖向辅助连杆6相铰接,过桥横向辅助连杆7,其作用是为工人提供侧面保护。
56.进一步的,
57.过桥驱动缸2的控制装置与翻车机的翻转角度控制装置数据互相联通,能够进行联动配合,进而可以根据设定的翻车机翻转的角度对过桥走台的放下动作进行合理的控制,形成更为有效的联动,为以后进行智能化控制做基础。
58.过桥驱动缸的后铰点10,将过桥驱动缸2同清料过桥地面支架1铰接在一起;
59.过桥驱动缸的前铰点11,将过桥驱动缸2同过桥上部驱动架3铰接在一起;过桥上部驱动架的后铰点12,将过桥上部驱动架3铰接在清料过桥地面支架1上,过桥上部驱动架3可以绕该点转动;
60.过桥上部驱动架的前铰点13,将过桥上部驱动架3同过桥竖向驱动连杆5铰接在一起;
61.过桥走台的后铰点14,将过桥走台4同清料过桥地面支架1上,过桥走台4可绕该点转动;
62.过桥走台的前铰点15,将过桥走台4同过桥竖向驱动连杆5铰接在一起;过桥驱动缸的前铰点11一般设在过桥上部驱动架的后铰点12与过桥上部驱动架的前铰点13连线的上方,在形成一定结构强度及刚度的同时,使得过桥驱动缸2动作时,相对过桥上部驱动架的后铰点12的转动力臂较长,以便降低过桥油缸2的驱动力;
63.过桥上部驱动架的后铰点12与过桥上部驱动架的前铰点13之间的连线,过桥走台的后铰点14与过桥走台的前铰点之间的连线15,平行且等距离;过桥上部驱动架的后铰点12与过桥走台的后铰点14之间的连线,过桥上部驱动架的前铰点13与过桥走台的前铰点15之间的连线,平行且等距离;
64.即:4点围成1个平行四边形,以便同步起落。
65.过桥竖向辅助连杆6、过桥横向辅助连杆7的相应铰接顶均组成平行四边形,以便同步起落。
66.工作原理:
67.1)本发明,清料过桥抬起允许翻集装箱状态:
68.如附图1所示:
69.过桥驱动缸2缩短,通过过桥驱动缸的前铰点11带动过桥上部驱动架3绕过桥上部驱动架的后铰点12向上转动,过桥上部驱动架的前铰点13随过桥上部驱动架3抬起并带动过桥竖向驱动连杆5抬起,过桥竖向驱动连杆5通过过桥走台的前铰点15带动过桥走台4,绕过桥走台的后铰点14转动,实现过桥走台4的抬起。
70.相应地,由于各铰点为平行四边形结构,过桥竖向辅助连杆6;过桥横向辅助连杆7也将相应地抬起。
71.从而使得清料过桥位于抬起允许翻卸集装箱状态。
72.2)本发明,清料过桥放下同集装箱搭接,成为允许过人清料状态截面图:
73.如附图2所示:
74.翻卸后的敞顶集装箱,返回到约90
°
的位置时,
75.过桥驱动缸2伸长,通过过桥驱动缸的前铰点11推动过桥上部驱动架3绕过桥上部驱动架的后铰点12向下转动,过桥上部驱动架的前铰点13随过桥上部驱动架3落下并带动过桥竖向驱动连杆5落下,过桥竖向驱动连杆5通过过桥走台的前铰点15推动过桥走台4,绕过桥走台的后铰点14转动,实现过桥走台4的落下,直至同集装箱压头8搭接,或直接达到敞顶集装箱9的开口处。
76.上述向下的动作也可由过桥的重力带动过桥驱动缸2完成。
77.相应地,由于各铰点为平行四边形结构,过桥竖向辅助连杆6;过桥横向辅助连杆7也将相应地落下。
78.从而使得清料过桥位于同敞顶集装箱9顶开口相连的状态,工人可以在此状态下通过过桥走台4,从地面走入敞顶集装箱9进行物料清料工作。
79.清料完毕后,工人从集装箱内走到地面,过桥驱动缸2缩短,清料过桥抬起,进行下一个循环。
80.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。