一种基于ga算法的浅水多波束褶皱误差自动改正方法
技术领域
1.本发明属于多波束测深后处理技术领域,具体涉及一种基于ga算法的浅水多波束褶皱误差自动改正方法。
背景技术:
2.实际工作中,受海洋动态环境的影响,多波束换能器与运动传感器间的集成不完善而产生褶皱误差在大多数情况下难以避免,以往该类误差因量级较小、不易在普通水深图或地形图中呈现而没有得到过多的关注。随着高精度、高分辨率成图需求的增加,该类误差成为了必须要解决的问题。现有技术在性能上虽有各自的优势,但绝大多基于数理统计规律进行误差改正,此类技术主观性较强,忽略了各误差间的耦合性,且以人工调整为主,未能给出自动化的处理方法。
技术实现要素:
3.本发明提出了一种基于ga算法的浅水多波束褶皱误差自动改正方法,以解决现有技术中多波束褶皱误差改正方法忽略各误差间的耦合性、非自动化的问题。
4.为了实现上述目的,本发明采用如下技术方案:
5.一种基于ga算法的浅水多波束褶皱误差自动改正方法,包括:
6.步骤1:考虑发射换能器与接收换能器的独立性,对常规波束归位模型进行改进和完善,提高测深点位置与水深的归算精度;
7.步骤2:将时间延迟、尺度误差、轴向偏差和杆臂误差参数化并引入改进波束归位模型,构建误差关联模型;
8.步骤3:沿条带方向,在两侧边缘波束所在地形相对平坦区选取对称的区块数据,将两侧边缘波束选区测深点分别拟合平面,以测深点到平面的距离为约束,采用ga算法自动求解对应误差参数最佳估值,实现褶皱误差自动改正。
9.优选地,步骤1中,改进波束归位模型的构建步骤包括:
10.步骤1.1:利用公式(1)、(2)、(3)和(4)计算换能器坐标系下顾及发射换能器与接收换能器独立性的波束入射向量θ和φ;
11.沿换能器坐标系下z轴方向单位向量u
z
=[0 0 1]
t
,其在发射导向角θ
t
与接收导向角θ
r
的影响下可分别表示为:
[0012][0013]
[0014]
定义发射导向角与接收导向角共同影响下的单位向量u
z
在换能器坐标系下的坐标为:
[0015][0016]
进而推得换能器坐标系下波束入射向量为:
[0017][0018]
步骤1.2:顾及发射导向角的影响、发射时刻换能器姿态的影响和发射换能器与接收换能器安装角度差异,利用公式(4)和(5)构建改进波束归位模型及相应水深;
[0019]
基于常规波束归位模型计算的波束点在地理坐标系下坐标可表示为:
[0020][0021]
式中,[0,ssin(θ
r
θ
r
),scos(θ
r
θ
r
)]
t
为波束点在换能器坐标系下坐标,其中s为换能器声学中心至测点斜距,可由声线跟踪得到,θ
r
为波束接收导向角,θ
r
为声速折射角;[x
off
,y
off
,z
off
]
t
为在船坐标系下换能器声学中心与gnss天线中心的偏移量;[x
g
,y
g
,z
g
]
t
为当地水平坐标系原点o在地心地固坐标系下的空间直角坐标,其中当地水平坐标系原点o为gnss天线中心;r
w
为关于大地经度和纬度的旋转矩阵;r
att
和r
align
分别为三个方向姿态角与安装偏差角构成的旋转矩阵,三个方向各自旋转矩阵为:
[0022][0023]
式中,r(r)、r(p)和r(κ)分别为横摇、纵摇和艏摇三个方向旋转矩阵;
[0024]
改进后波束归位模型及相应水深为:
[0025][0026]
式中,r’att
和r’align
分别为顾及发射换能器与接收换能器的独立性的三个方向姿态角与安装偏差角构成的旋转矩阵,其中横摇角采用接收时刻,纵摇角和艏摇角采用发射时刻,横摇安装角采用接收换能器安装角,纵摇和艏摇安装角采用发射换能器安装角;h为水深值,h
draft
、h
tide
、h
heave
和h
induce
分别为吃水、潮位、升沉和感生起伏。
[0027]
优选地,在步骤2中,误差关联模型的构建步骤如下:
[0028]
步骤2.1:将尺度误差、时间延迟、轴向偏差及杆臂误差参数化;
[0029]
步骤2.1.1:当同时存在时间延迟δt和尺度误差δρ时,横摇r’=δρ(r v
i
δt),则横摇矩阵变化为:
[0030][0031]
式中,v
i
为对应时刻瞬时角度变化速度;
[0032]
步骤2.1.2:进行设备安装时,运动传感器纵轴方向引入的角度偏差为δκ,修正后的船体真实横摇r、纵摇p为与传感器输出r’、纵摇p’的关系为:
[0033][0034]
步骤2.1.3:x和y方向杆臂误差δx和δy引起的感生起伏误差δh
induce
为:
[0035]
δh
induce
=δxsinp
‑
δysinrcosp
ꢀꢀꢀ
(10)
[0036]
当时间延迟δt、尺度误差δρ、轴向偏差δκ和杆臂误差[δx,δy]均存在时,根据公式(9)可得此时传感器输出横摇值r’与纵摇值p’为:
[0037][0038]
步骤2.2:构建误差关联模型;
[0039]
将各项褶皱误差参数化,结合公式(7)、(10)和(11)构建误差关联模型的点位和水深为:
[0040][0041]
式中,h’induce
为上述四种误差同时影响下的感生起伏。
[0042]
优选地,在步骤3中,采用ga算法自动求解对应误差参数最佳估值的步骤如下:
[0043]
步骤3.1:建立约束条件;
[0044]
采用最小二乘拟合法拟合平面ax by cz d=0,可令平面方程为:
[0045]
z=a0x a1y a2ꢀꢀꢀ
(13)
[0046]
由最小二乘法可知:
[0047]
s=min∑[(a0x a1y a2)
‑
z
i
]2ꢀꢀꢀ
(14)
[0048]
分别取a0、a1、a2的偏导数从而可得:
[0049][0050]
从而计算得到参数a0、a1、a2,构建平面z=a0x a1y a2;
[0051]
采用上述最小二乘拟合法将两侧边缘波束选区测深点分别拟合平面,以测深点到平面的距离为约束。令约束条件为δh=g(δt,δρ,δκ,δx,δy),δt,δρ,δκ,δx,δy为待求参数,则当所选区域内约束距离趋近于零时,所对应的参数解则为最优解;
[0052]
步骤3.2:利用遗传算法自动求解相应误差参数;
[0053]
构建适应度函数为:
[0054][0055]
采用遗传算法自动求解相应误差参数最佳估值的过程步骤包括:
[0056]
s1.对相应误差参数的可行解进行实数编码;
[0057]
s2.进行种群初始化,根据设置的种群数量在相应误差参数范围内采用随机无指导的初始化方法产生个体,形成种群;
[0058]
s3.根据设置的交叉概率和变异概率,种群的各个个体进行进化,产生新个体;
[0059]
s4.新个体进行适应度值的计算,采用轮盘选择法求算各个体被留下的概率,保留下的个体形成新的种群;
[0060]
s5.如果没有达到设置的迭代次数或者最优适应度值小于设置的阈值,重复步骤s3
‑
s4,否则继续步骤s6;
[0061]
s6.根据适应度值的大小选出最优的个体,即得到相应误差参数的最优解,从而实现褶皱误差自动改正。
[0062]
与现有技术相比,本发明构建一种改进的波束归位模型,提高了测深点位置与水深的归算精度;然后基于改进模型构建了褶皱误差的误差关联模型,并利用ga算法实现了态搜索对应误差参数的最佳估值,从而实现对褶皱误差自动改正;有效解决了褶皱误差改正时未顾及各误差间的耦合性、非自动化等问题。
附图说明
[0063]
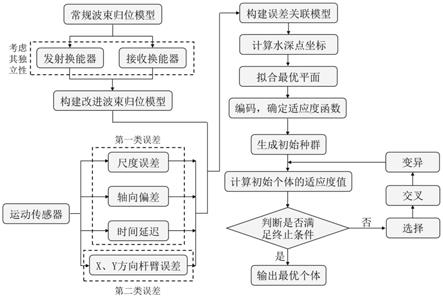
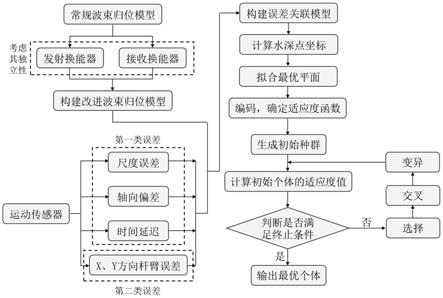
图1为本发明中基于ga算法的浅水多波束褶皱误差自动改正方法的流程图。
[0064]
图2为波束导向与姿态关系图,(a)为发射换能器形成的发射波束在纵摇方向摆动,(b)为接收换能器形成的接收波束在横摇方向摆动。
[0065]
附图标记包括:1
‑
发射换能器,2
‑
接收换能器,3
‑
发射波束,4
‑
接收波束,5
‑
航行方向。
具体实施方式
[0066]
下面结合附图具体实施方式对本发明作进一步详细说明:
[0067]
一种基于ga(genetic algorithm)算法的浅水多波束褶皱误差自动改正方法,其流程如图1所示。包括以下步骤:
[0068]
步骤1:考虑发射换能器1与接收换能器2的独立性,对常规波束归位模型进行改进和完善,提高测深点位置与水深的归算精度;
[0069]
由于常规波束模型忽略了多波束发射换能器1与接收换能器2的独立性,即忽略了发射导向角的影响、发射时刻换能器姿态的影响和发射换能器1与接收换能器2安装角度差异,故模型精度难以满足高精度的褶皱误差改正需求。因此,首先需对常规模型进行改进以提高测深点位置与水深的归算精度。
[0070]
进一步的实施例中,步骤1具体包括如下步骤:
[0071]
步骤1.1:计算顾及发射换能器1与接收换能器2独立性的波束入射角向量;
[0072]
顾及发射导向角和接收导向角的影响,根据虚拟同心模型理与波束形成原理可知,发射换能器1及发射波束3更敏感于纵摇方向的姿态,接收换能器2及接收波束4更敏感于横摇方向姿态(如图2所示),利用公式(1)、(2)、(3)和(4)计算换能器坐标系下顾及发射换能器1与接收换能器2独立性的波束入射向量θ和
[0073]
对于沿换能器坐标系下z轴方向单位向量u
z
=[0 0 1]
t
,其在发射导向角θ
t
与接收导向角θ
r
的影响下可分别表示为:
[0074][0075][0076]
定义发射导向角与接收导向角共同影响下的单位向量u
z
在换能器坐标系下的坐标为:
[0077][0078]
进而推得换能器坐标系下波束入射向量为:
[0079][0080]
步骤1.2:构建改进波束归位模型;
[0081]
顾及发射导向角的影响、发射时刻换能器姿态的影响和发射换能器1与接收换能器2安装角度差异,利用公式(4)和(5)构建改进波束归位模型及相应水深。
[0082]
基于常规波束归位模型计算的波束点在地理坐标系下坐标可表示为:
[0083][0084]
式中,[0,ssin(θ
r
θ
r
),scos(θ
r
θ
r
)]
t
为波束点在换能器坐标系下坐标,其中s为换能器声学中心至测点斜距,可由声线跟踪得到,θ
r
为波束接收导向角,θ
r
为声速折射角;[x
off
,y
off
,z
off
]
t
为在船坐标系下换能器声学中心与gnss天线中心的偏移量;[x
g
,y
g
,z
g
]
t
为当地水平坐标系原点o在地心地固坐标系下的空间直角坐标,其中当地水平坐标系原点o为gnss天线中心;r
w
为关于大地经度和纬度的旋转矩阵;r
att
和r
align
分别为三个方向姿态角与安装偏差角构成的旋转矩阵。三个方向各自旋转矩阵为:
[0085][0086]
式中,r(r)、r(p)和r(κ)分别为横摇、纵摇和艏摇三个方向旋转矩阵。
[0087]
改进后波束归位模型及相应水深为:
[0088][0089]
式中,r’att
和r’align
分别为顾及发射换能器1与接收换能器2的独立性的三个方向姿态角与安装偏差角构成的旋转矩阵,其中横摇角采用接收时刻,纵摇角和艏摇角采用发射时刻,横摇安装角采用接收换能器2安装角,纵摇和艏摇安装角采用发射换能器1安装角;h为水深值,h
draft
、h
tide
、h
heave
和h
induce
分别为吃水、潮位、升沉和感生起伏。
[0090]
步骤2:将时间延迟、尺度误差、轴向偏差和杆臂误差参数化引入改进波束归位模型,构建误差关联模型;
[0091]
进一步的实施例中,步骤2具体包括如下步骤:
[0092]
步骤2.1:将尺度误差、时间延迟、轴向偏差及杆臂误差参数化;
[0093]
(1)受串口传输或者缓冲区设置等原因,运动传感器会存在一定时间延迟;此外,运动传感器的输出值很可能是运动时序值的因子,即误差与实际值有关,真实值越大,则误差越大,真实值越小,则误差越小,它们之间存在一个尺度。当同时存在时间延迟δt和尺度误差δρ时,横摇r’=δρ(r v
i
δt),则横摇矩阵变化为:
[0094][0095]
式中,v
i
为对应时刻瞬时角度变化速度。
[0096]
(2)理想情况下,运动传感器纵轴方向(x轴方向)应与船纵轴方向相同,然而进行设备安装时,不可避免的会引入一定的角度偏差δκ,从而使得运动传感器测量的姿态角不能反映为船体真实姿态摆动,尤其体现在横摇方向,最终导致地形在垂直条带方向出现摆动。修正后的船体真实横摇r、纵摇p为与传感器输出r’、纵摇p’的关系为:
[0097][0098]
(3)杆臂误差[δx,δy]即运动传感器相对于多波束换能器的位置偏移误差,由于两者之间存在一定偏移量,在姿态的影响下,换能器相对于运动传感器会产生感生起伏h
induce
。当存在杆臂误差时,感生起伏引入误差进而导致条带整体出现起伏。x与y方向杆臂误差产生影响较大,两方向杆臂误差δx和δy引起的感生起伏误差δh
induce
为:
[0099]
δh
induce
=δxsinp
‑
δysinrcosp
ꢀꢀꢀ
(10)
[0100]
当时间延迟δt、尺度误差δρ、轴向偏差δκ和杆臂误差[δx,δy]均存在时,根据公式(9)可得此时传感器输出横摇值r’与纵摇值p’为:
[0101][0102]
步骤2.2:构建误差关联模型;
[0103]
将各项褶皱误差参数化,结合公式(7)、(10)和(11)构建误差关联模型的点位和水深为:
[0104][0105]
式中,h’induce
为上述四种误差同时影响下的感生起伏。
[0106]
步骤3:沿条带方向,在两侧边缘波束所在地形相对平坦区选取对称的区块数据,将两侧边缘波束选区测深点分别拟合平面,以测深点到平面的距离为约束,采用ga算法自动求解对应误差参数最佳估值,实现褶皱误差自动改正。
[0107]
进一步的实施例中,步骤3具体包括如下步骤:
[0108]
步骤3.1:建立约束条件;
[0109]
为便于进行褶皱误差的消除,选择测区内相对平坦区域进行误差校正,以避免复杂地形变化覆盖褶皱误差表现。由于褶皱误差表现为条带边缘或者条带整体出现起伏,故沿条带方向在两侧边缘波束所在地形相对平坦区选取大致对称的区块数据进行校正。将两侧边缘波束选区测深点分别拟合平面,以测深点到平面的距离为约束。
[0110]
采用最小二乘拟合法拟合平面ax by cz d=0,可令平面方程为:
[0111]
z=a0x a1y a2ꢀꢀꢀ
(13)
[0112]
由最小二乘法可知:
[0113]
s=min∑[(a0x a1y a2)
‑
z
i
]2ꢀꢀꢀ
(14)
[0114]
分别取a0、a1、a2的偏导数从而可得:
[0115][0116]
从而计算得到参数a0、a1、a2,构建平面z=a0x a1y a2。
[0117]
令约束条件为δh=g(δt,δρ,δκ,δx,δy),δt,δρ,δκ,δx,δy为待求参数,则当所选区域内约束距离趋近于零时,所对应的参数解则为最优解。
[0118]
步骤3.2:利用遗传算法自动求解相应误差参数;
[0119]
由于g(δt,δρ,δκ,δx,δy)难以线性化,难以采用常规最优方法进行求解,故本发明采用遗传算法进行求解,快速求解搜索全局最优值。根据遗传算法原理,构建适应度函数为:
[0120][0121]
采用遗传算法自动求解相应误差参数最佳估值的过程步骤包括:
[0122]
s1.对相应误差参数的可行解进行实数编码;
[0123]
s2.进行种群初始化,根据设置的种群数量在相应误差参数范围内采用随机无指导的初始化方法产生个体,形成种群;
[0124]
s3.根据设置的交叉概率和变异概率,种群的各个个体进行进化,产生新个体;
[0125]
s4.新个体进行适应度值的计算,采用轮盘选择法求算各个体被留下的概率,保留下的个体形成新的种群;
[0126]
s5.如果没有达到设置的迭代次数或者最优适应度值小于设置的阈值,重复步骤s3
‑
s4,否则继续步骤s6;
[0127]
s6.根据适应度值的大小选出最优的个体,即得到相应误差参数的最优解,从而实现褶皱误差自动改正。
[0128]
综上所述,本发明提供了基于ga算法的浅水多波束褶皱误差自动改正方法,方法包括:首先,对常规波束归位模型进行改进,考虑发射换能器1与接收换能器2的独立性,提高测深点位置与水深计算的精度;然后,基于改进归位模型推导了时间延迟、尺度误差、轴
向偏差、杆臂误差与波束点位之间相关联的点位和水深模型;最后,沿条带选取海底平坦区域水深点作为校准数据,以条带两侧边缘区域测深点分别拟合的平面为约束,利用遗传算法动态搜索最优平面及对应误差参数的最佳估值。本发明通过这种方法,实现了浅水多波束褶皱误差自动改正,有效解决了褶皱误差改正时未顾及各误差间的耦合性、非自动化等问题。
[0129]
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。