技术特征:
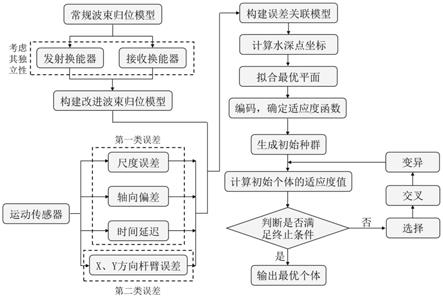
1.一种基于ga算法的浅水多波束褶皱误差自动改正方法,其特征在于,包括:步骤1:考虑发射换能器与接收换能器的独立性,对常规波束归位模型进行改进和完善,提高测深点位置与水深的归算精度;步骤2:将时间延迟、尺度误差、轴向偏差和杆臂误差参数化并引入改进波束归位模型,构建误差关联模型;步骤3:沿条带方向,在两侧边缘波束所在地形相对平坦区选取对称的区块数据,将两侧边缘波束选区测深点分别拟合平面,以测深点到平面的距离为约束,采用ga算法自动求解对应误差参数最佳估值,实现褶皱误差自动改正。2.根据权利要求1所述的基于ga算法的浅水多波束褶皱误差自动改正方法,其特征在于,步骤1中,改进波束归位模型的构建步骤包括:步骤1.1:利用公式(1)、(2)、(3)和(4)计算换能器坐标系下顾及发射换能器与接收换能器独立性的波束入射向量θ和φ;沿换能器坐标系下z轴方向单位向量u
z
=[0 0 1]
t
,其在发射导向角θ
t
与接收导向角θ
r
的影响下可分别表示为:的影响下可分别表示为:定义发射导向角与接收导向角共同影响下的单位向量u
z
在换能器坐标系下的坐标为:进而推得换能器坐标系下波束入射向量为:步骤1.2:顾及发射导向角的影响、发射时刻换能器姿态的影响和发射换能器与接收换能器安装角度差异,利用公式(4)和(5)构建改进波束归位模型及相应水深;基于常规波束归位模型计算的波束点在地理坐标系下坐标可表示为:式中,[0,ssin(θ
r
θ
r
),scos(θ
r
θ
r
)]
t
为波束点在换能器坐标系下坐标,其中s为换能器声学中心至测点斜距,可由声线跟踪得到,θ
r
为波束接收导向角,θ
r
为声速折射角;[x
off
,y
off
,z
off
]
t
为在船坐标系下换能器声学中心与gnss天线中心的偏移量;[x
g
,y
g
,z
g
]
t
为当地水
平坐标系原点o在地心地固坐标系下的空间直角坐标,其中当地水平坐标系原点o为gnss天线中心;r
w
为关于大地经度和纬度的旋转矩阵;r
att
和r
align
分别为三个方向姿态角与安装偏差角构成的旋转矩阵,三个方向各自旋转矩阵为:式中,r(r)、r(p)和r(κ)分别为横摇、纵摇和艏摇三个方向旋转矩阵;改进后波束归位模型及相应水深为:式中,r’att
和r’align
分别为顾及发射换能器与接收换能器的独立性的三个方向姿态角与安装偏差角构成的旋转矩阵,其中横摇角采用接收时刻,纵摇角和艏摇角采用发射时刻,横摇安装角采用接收换能器安装角,纵摇和艏摇安装角采用发射换能器安装角;h为水深值,h
draft
、h
tide
、h
heave
和h
induce
分别为吃水、潮位、升沉和感生起伏。3.根据权利要求1所述的基于ga算法的浅水多波束褶皱误差自动改正方法,其特征在于,在步骤2中,误差关联模型的构建步骤如下:步骤2.1:将尺度误差、时间延迟、轴向偏差及杆臂误差参数化;步骤2.1.1:当同时存在时间延迟δt和尺度误差δρ时,横摇r’=δρ(r v
i
δt),则横摇矩阵变化为:为:式中,v
i
为对应时刻瞬时角度变化速度;步骤2.1.2:进行设备安装时,运动传感器纵轴方向引入的角度偏差为δκ,修正后的船体真实横摇r、纵摇p为与传感器输出r’、纵摇p’的关系为:步骤2.1.3:x和y方向杆臂误差δx和δy引起的感生起伏误差δh
induce
为:δh
induce
=δx sinp
‑
δy sinr cosp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)当时间延迟δt、尺度误差δρ、轴向偏差δκ和杆臂误差[δx,δy]均存在时,根据公式
(9)可得此时传感器输出横摇值r’与纵摇值p’为:步骤2.2:构建误差关联模型;将各项褶皱误差参数化,结合公式(7)、(10)和(11)构建误差关联模型的点位和水深为:式中,h’induce
为上述四种误差同时影响下的感生起伏。4.根据权利要求1所述的基于ga算法的浅水多波束褶皱误差自动改正方法,其特征在于,在步骤3中,采用ga算法自动求解对应误差参数最佳估值的步骤如下:步骤3.1:建立约束条件;采用最小二乘拟合法拟合平面ax by cz d=0,可令平面方程为:z=a0x a1y a2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)由最小二乘法可知:s=min∑[(a0x a1y a2)
‑
z
i
]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)分别取a0、a1、a2的偏导数从而可得:从而计算得到参数a0、a1、a2,构建平面z=a0x a1y a2;采用上述最小二乘拟合法将两侧边缘波束选区测深点分别拟合平面,以测深点到平面的距离为约束,令约束条件为δh=g(δt,δρ,δκ,δx,δy),δt,δρ,δκ,δx,δy为待求参数,则当所选区域内约束距离趋近于零时,所对应的参数解则为最优解;步骤3.2:利用遗传算法自动求解相应误差参数;构建适应度函数为:采用遗传算法自动求解相应误差参数最佳估值的过程步骤包括:s1.对相应误差参数的可行解进行实数编码;
s2.进行种群初始化,根据设置的种群数量在相应误差参数范围内采用随机无指导的初始化方法产生个体,形成种群;s3.根据设置的交叉概率和变异概率,种群的各个个体进行进化,产生新个体;s4.新个体进行适应度值的计算,采用轮盘选择法求算各个体被留下的概率,保留下的个体形成新的种群;s5.如果没有达到设置的迭代次数或者最优适应度值小于设置的阈值,重复步骤s3
‑
s4,否则继续步骤s6;s6.根据适应度值的大小选出最优的个体,即得到相应误差参数的最优解,从而实现褶皱误差自动改正。
技术总结
本发明公开了一种基于GA算法的浅水多波束褶皱误差自动改正方法,属于多波束测深后处理技术领域,其首先在保留常规波束归位模型线性特性的基础上,对该模型的独立性进行改进和完善,考虑发射换能器与接收换能器的独立性,提高测深点位置与水深计算的精度;然后,从多波束测深误差传播的角度出发,将时间延迟、尺度误差、轴向偏差和杆臂误差参数化引入改进模型,构建误差关联模型;最后,以海底平坦区域拟合最优平面为约束利用GA算法动态搜索对应误差参数的最佳估值,实现对褶皱误差自动改正。本发明通过这种方法,实现了多波束测深动态误差的精细化、自动化处理,有效解决了褶皱误差改正时未顾及各误差间的耦合性、非自动化等问题。题。题。
技术研发人员:阳凡林 云天宇 卜宪海 马跃 许方正 刘洪霞 王峰
受保护的技术使用者:山东科技大学
技术研发日:2021.07.27
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。