1.本公开涉及综采工作面自动控制技术领域,尤其涉及一种采煤机和支架的协同控制方法、装置和电子设备。
背景技术:
2.煤矿井下环境复杂多变,煤壁中除了覆含煤层之外,还夹杂了大量硬度较高的杂质体、矸石和岩石断层等,在实时多变的工况条件下,采煤机由于缺少自适应工况环境的调节功能,会导致采煤机滚筒的承受载荷的波动性较大,使得采煤机滚筒容易受损,并且,支架的跟机效果也会受到相应的影响,从而整体上导致自主割煤的效率低下。
3.目前,较多综采工作面可以实现支架跟机自动化控制,用于提高自主割煤的效率,但在自动化控制过程中往往存在由于移架动作不到位导致丢架或者推移不到位等问题。
技术实现要素:
4.本公开第一方面实施例提出一种采煤机和支架的协同控制方法,能够实现采煤机和支架的自动化协同工作,提高支架的自动跟机效果,从而提高自主割煤的效率,并能够提高采煤机截割部的可靠性,延长其使用寿命。
5.本公开第二方面实施例提出一种采煤机和支架的协同控制装置。
6.本公开第三方面实施例提出一种电子设备。
7.本公开第一方面实施例提出了一种采煤机和支架的协同控制方法,包括:
8.获取采煤机的第一参数集,并获取支架的第二参数集,以及获取采煤工作面的环境参数集;
9.根据第一选取策略从所述第一参数集中选取多个参数,以生成第一子参数集;
10.调用采煤机牵引速度模型对所述第一子参数集进行处理,以生成所述采煤机的目标牵引速度;
11.根据第二选取策略分别从所述第一参数集、所述第二参数集和所述环境参数集中选取多个参数,以生成第二子参数集;
12.调用支架跟机算法模型对所述第二子参数集和所述目标牵引速度进行处理,以生成所述支架的目标移架距离和目标收护帮板速度;以及
13.根据所述目标移架距离和所述目标收护帮板速度对所述支架进行控制,以及根据所述目标牵引速度对所述采煤机进行控制。
14.本公开实施例的采煤机和支架的协同控制方法,能够实现采煤机和支架的自动化协同工作,提高支架的自动跟机效果,从而提高自主割煤的效率,并能够提高采煤机截割部的可靠性,延长其使用寿命。
15.另外,根据本公开上述实施例的采煤机和支架的协同控制方法还可以具有如下附加的技术特征:
16.在本公开的一个实施例中,所述采煤机和支架的协同控制方法,还包括:获取煤层
的截割阻抗;根据第三选取策略从所述第一参数集中选取多个参数,以生成第三子参数集;调用采煤机截割牵引模型对所述第三子参数集和所述截割阻抗进行处理,以生成所述采煤机的牵引速度和所述截割阻抗的第一数据关系;根据所述第一数据关系,确定所述目标牵引速度是否满足第一参数条件;响应于所述目标牵引速度不满足所述第一参数条件,对所述第一子参数集进行优化,并重新调用所述采煤机牵引速度模型对优化后的第一子参数集进行处理,以重新生成所述采煤机的目标牵引速度。
17.在本公开的一个实施例中,所述采煤机和支架的协同控制方法,还包括:根据第四选取策略分别从所述第一参数集、所述第二参数集和所述环境参数集中选取多个参数,以生成第四子参数集;调用协同控制模型对所述截割阻抗、所述第四子参数集和所述目标牵引速度进行处理,以生成所述支架的移架距离,以及所述支架的收护帮板速度和所述目标牵引速度的第二数据关系;根据所述移架距离和所述第二数据关系,确定所述目标移架距离和所述目标收护帮板速度是否满足第二参数条件;响应于所述目标移架距离和所述目标收护帮板速度不满足所述第二参数条件,对所述第二子参数集进行优化,并重新调用所述支架跟机算法模型对优化后的第二子参数集和所述目标牵引速度进行处理,以重新生成所述支架的目标移架距离和目标收护帮板速度。
18.在本公开的一个实施例中,所述目标牵引速度为全煤煤层、夹矸煤层或煤岩断层工况下所述采煤机的恒功率条件下的牵引速度。
19.在本公开的一个实施例中,所述支架跟机算法模型通过以下步骤对所述第二子参数集和所述目标牵引速度进行处理,以生成所述支架的目标移架距离和目标收护帮板速度:对所述第二子参数集和所述目标牵引速度进行预处理,以生成所述支架的初始移架距离和初始收护帮板速度;对所述初始移架距离和所述初始收护帮板速度进行动态补偿,以生成所述目标移架距离和所述目标收护帮板速度。
20.在本公开的一个实施例中,所述采煤机截割牵引模型通过以下步骤对所述第三子参数集和所述截割阻抗进行处理,以生成所述采煤机的牵引速度和所述截割阻抗的第一数据关系:根据所述第三子参数集和所述截割阻抗,建立所述截割阻抗和采煤机截割电机电流的关系公式;基于所述采煤机保持恒功率截割的工作状态,并根据所述关系公式进行解算,以生成所述第一数据关系。
21.本公开第二方面实施例提出了一种采煤机和支架的协同控制装置,包括:
22.第一获取模块,用于获取采煤机的第一参数集,并获取支架的第二参数集,以及获取采煤工作面的环境参数集;
23.第一生成模块,用于根据第一选取策略从所述第一参数集中选取多个参数,以生成第一子参数集;
24.第一处理模块,用于调用采煤机牵引速度模型对所述第一子参数集进行处理,以生成所述采煤机的目标牵引速度;
25.第二生成模块,用于根据第二选取策略分别从所述第一参数集、所述第二参数集和所述环境参数集中选取多个参数,以生成第二子参数集;
26.第二处理模块,用于调用支架跟机算法模型对所述第二子参数集和所述目标牵引速度进行处理,以生成所述支架的目标移架距离和目标收护帮板速度;以及
27.控制模块,用于根据所述目标移架距离和所述目标收护帮板速度对所述支架进行
控制,以及根据所述目标牵引速度对所述采煤机进行控制。
28.本公开实施例的采煤机和支架的协同控制装置,能够实现采煤机和支架的自动化协同工作,提高支架的自动跟机效果,从而提高自主割煤的效率,并能够提高采煤机截割部的可靠性,延长其使用寿命。
29.另外,根据本公开上述实施例的采煤机和支架的协同控制装置还可以具有如下附加的技术特征:
30.在本公开的一个实施例中,所述采煤机和支架的协同控制装置,还包括:第二获取模块,用于获取煤层的截割阻抗;第三生成模块,用于根据第三选取策略从所述第一参数集中选取多个参数,以生成第三子参数集;第三处理模块,用于调用采煤机截割牵引模型对所述第三子参数集和所述截割阻抗进行处理,以生成所述采煤机的牵引速度和所述截割阻抗的第一数据关系;第一确定模块,用于根据所述第一数据关系,确定所述目标牵引速度是否满足第一参数条件;第一重新处理模块,用于响应于所述目标牵引速度不满足所述第一参数条件,对所述第一子参数集进行优化,并重新调用所述采煤机牵引速度模型对优化后的第一子参数集进行处理,以重新生成所述采煤机的目标牵引速度。
31.在本公开的一个实施例中,所述采煤机和支架的协同控制装置,还包括:第四生成模块,用于根据第四选取策略分别从所述第一参数集、所述第二参数集和所述环境参数集中选取多个参数,以生成第四子参数集;第四处理模块,用于调用协同控制模型对所述截割阻抗、所述第四子参数集和所述目标牵引速度进行处理,以生成所述支架的移架距离,以及所述支架的收护帮板速度和所述目标牵引速度的第二数据关系;第二确定模块,用于根据所述移架距离和所述第二数据关系,确定所述目标移架距离和所述目标收护帮板速度是否满足第二参数条件;第二重新处理模块,用于响应于所述目标移架距离和所述目标收护帮板速度不满足所述第二参数条件,对所述第二子参数集进行优化,并重新调用所述支架跟机算法模型对优化后的第二子参数集和所述目标牵引速度进行处理,以重新生成所述支架的目标移架距离和目标收护帮板速度。
32.本公开第三方面实施例提出了一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时,实现如前述第一方面实施例所述的采煤机和支架的协同控制方法。
33.本公开实施例的电子设备,通过处理器执行存储在存储器上的计算机程序,能够实现采煤机和支架的自动化协同工作,提高支架的自动跟机效果,从而提高自主割煤的效率,并能够提高采煤机截割部的可靠性,延长其使用寿命。
34.本公开附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
附图说明
35.本公开上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
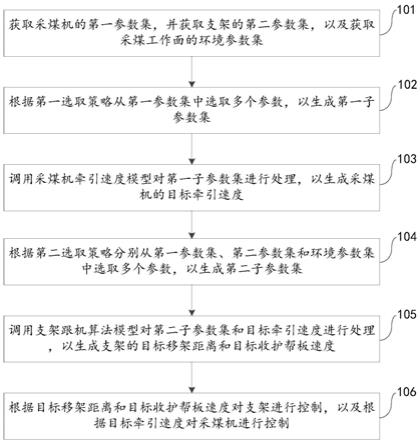
36.图1为根据本公开一个实施例的采煤机和支架的协同控制方法的流程示意图;
37.图2为根据本公开一个实施例的采煤机牵引速度模型的训练过程流程图;
38.图3为根据本公开另一个实施例的采煤机和支架的协同控制方法的流程示意图;
39.图4为根据本公开一个实施例的支架跟机算法模型动态补偿示意图;
40.图5为根据本公开一个实施例的elman神经网络结构示意图;
41.图6为根据本公开一个实施例的优化ga
‑
elman算法模型流程图;
42.图7为根据本公开另一个实施例的采煤机和支架的协同控制方法的流程示意图;
43.图8为根据本公开另一个实施例的采煤机和支架的协同控制方法的流程示意图;
44.图9为根据本公开另一个实施例的采煤机和支架的协同控制方法的流程示意图;
45.图10为根据本公开一个实施例的采煤机和支架的协同控制方法具体示例图;
46.图11为根据本公开一个实施例的采煤机和支架的协同控制装置的方框示意图;以及
47.图12为根据本公开一个实施例的电子设备的结构示意图。
具体实施方式
48.下面详细描述本公开的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本公开,而不能理解为对本公开的限制。
49.下面参照附图描述本公开实施例的采煤机和支架的协同控制方法、装置、电子设备和存储介质。
50.本公开实施例提供的采煤机和支架的协同控制方法,可以由电子设备来执行,该电子设备可为采煤机嵌入式电脑、采煤机控制中心设备、支架嵌入式电脑、支架控制中心设备、综采控制中心设备或服务器等,此处不做任何限定。
51.在本公开实施例中,电子设备中可以设置有处理组件、存储组件和驱动组件。可选的,该驱动组件和处理组件可以集成设置,该存储组件可以存储操作系统、应用程序或其他程序模块,该处理组件通过执行存储组件中存储的应用程序来实现本公开实施例提供的采煤机和支架的协同控制方法。
52.图1为根据本公开一个实施例的采煤机和支架的协同控制方法的流程示意图。
53.本公开实施例的采煤机和支架的协同控制方法,还可由本公开实施例提供的采煤机和支架的协同控制装置执行,该装置可配置于电子设备中,以实现获取采煤机的第一参数集,并获取支架的第二参数集,以及获取采煤工作面的环境参数集,并根据第一选取策略从第一参数集中选取多个参数,以生成第一子参数集,以及调用采煤机牵引速度模型对第一子参数集进行处理,以生成采煤机的目标牵引速度,而后根据第二选取策略分别从第一参数集、第二参数集和环境参数集中选取多个参数,以生成第二子参数集,并调用支架跟机算法模型对第二子参数集和目标牵引速度进行处理,以生成支架的目标移架距离和目标收护帮板速度,最后根据目标移架距离和目标收护帮板速度对支架进行控制,以及根据目标牵引速度对采煤机进行控制,从而能够实现采煤机和支架的自动化协同工作,提高支架的自动跟机效果,进而提高自主割煤的效率,并能够提高采煤机截割部的可靠性,延长其使用寿命。
54.作为一种可能的情况,本公开实施例的采煤机和支架的协同控制方法还可以在服务器端执行,服务器可以为云服务器,可以在云端执行该采煤机和支架的协同控制方法。
55.如图1所示,该采煤机和支架的协同控制方法,可包括:
56.步骤101,获取采煤机的第一参数集,并获取支架的第二参数集,以及获取采煤工作面的环境参数集。
57.在本公开实施例中,获取采煤机的第一参数集、支架的第二参数集和采煤工作面的环境参数集的途径可有多条,其中,可通过相关的传感器分别获取采煤机的第一参数集、支架的第二参数集和采煤工作面的环境参数集中的各个参数,还可通过获取采煤机、支架和采煤工作面在工作(运行)过程中的状态(运行)信息,分别获取采煤机的第一参数集、支架的第二参数集和采煤工作面的环境参数集中的各个参数,此处不做任何限定。其中,第一参数集可包括采煤机的位置、方向、滚筒电流、俯仰角、滚筒温度等,第二参数集可包括支架总数量和收护帮板长度等,环境参数集可包括工作面长度和工作面倾角等。
58.步骤102,根据第一选取策略从第一参数集中选取多个参数,以生成第一子参数集。
59.需要说明的是,该实施例中所描述的第一选取策略可根据实际情况和需求进行标定,此处不做任何限定。
60.具体地,在获取到上述的第一参数集后,可根据第一选取策略从第一参数集中选取采煤机的位置、采煤机方向、滚筒电流、采煤机的俯仰角和滚筒温度(分别用t1、t2、t3、t4、t5来表示)等参数作为第一子参数集。
61.步骤103,调用采煤机牵引速度模型对第一子参数集进行处理,以生成采煤机的目标牵引速度。其中,目标牵引速度可为全煤煤层、夹矸煤层或煤岩断层工况下所述采煤机的恒功率条件下的牵引速度。
62.需要说明的是,该实施例中的采煤机牵引速度模型可为随机森林选择模型,可以提前将该采煤机牵引模型训练好,并将其预存在电子设备的存储空间中,以方便调取应用。其中,该存储空间不仅限于基于实体的存储空间,例如,硬盘,上述存储空间还可以是连接电子设备的云存储空间。
63.其中,该采煤机牵引速度模型的训练与生成可由相关的服务器进行,该服务器可以是云端服务器,也可以是一台电脑的主机,该服务器与可执行本公开实施例提供的采煤机和支架的协同控制方法的电子设备之间,建立有通信连接,该通信连接可以是无线网络连接和有线网络连接的至少一种。服务器可将训练完成的转化模型发送给电子设备,以便电子设备在需要时调用,从而大大减少电子设备的计算压力。
64.具体地,电子设备在获取上述第一子参数集后可从自身的存储空间中调出采煤机牵引速度模型,并将该第一子参数集输入至该采煤机牵引速度模型,从而通过该采煤机牵引速度模型对该第一子参数集进行分析处理,以生成采煤机分别在全煤煤层、夹矸煤层和煤岩断层工况下采煤机的恒功率条件下的目标牵引速度(用t6来表示)。
65.在本公开实施例中,上述牵引速度模型的训练过程可如下:
66.首先可将目标牵引速度分为“fast(快)”,“medium(中)”,“slow(慢)”和“stop(停止)”四个分类标签,各分类标签对应的目标牵引速度范围如表1所示:
67.[0068][0069]
表1
[0070]
根据上述t1、t2、t3、t4、t5、t6和表1可获取如图2所示的原始训练样本数据集,对于该原始训练样本数据集,可利用bootstrap(自展)抽样法进行抽样,以生成多个数据集,并且每个数据集都含有n个观测和p个自变量,其中,n和p均可为正整数。针对上述生成的每一个数据集可构造一棵cart(classification and regression tree,分类与回归树)决策树,在构建子树的过程中,随机选择p个字段使得决策树的p个字段尽可能生长,并利用投票法(分类投票法)将最高得票的类别作为最终的判断结果。由此,能够实现对采煤机牵引速度模型的训练,并生成最优采煤机牵引速度模型。
[0071]
步骤104,根据第二选取策略分别从第一参数集、第二参数集和环境参数集中选取多个参数,以生成第二子参数集。
[0072]
需要说明的是,该实施例中所描述的第二选取策略可根据实际情况和需求进行标定。
[0073]
具体地,在获取上述第一参数集、第二参数集和环境参数集后,可根据第二选取策略分别中第一参数集、第二参数集和环境参数集中选取采煤机
‑
支架的相对距离、采煤机速度、工作面环境参数、工作面倾角和支架自身的参数数据等作为第二子参数集。
[0074]
步骤105,调用支架跟机算法模型对第二子参数集和目标牵引速度进行处理,以生成支架的目标移架距离和目标收护帮板速度。
[0075]
需要说明的是,该实施例中所描述的支架跟机算法模型可以是提前训练好的,并存储在电子设备的存储空间中,以便于调取使用。
[0076]
具体地,在获取上述第二子参数集和目标牵引速度后,电子设备可从自身的存储空间中调出支架跟机算法模型,并将该第二子参数集和目标牵引速度输入至该支架跟机算法模型,从而通过该支架跟机算法模型对该第二子参数集和目标牵引速度进行处理,以生成支架的目标移架距离和目标收护帮板速度。
[0077]
为了清楚说明上一实施例,在本公开的一个实施例中,如图3所示,支架跟机算法模型可通过以下步骤对第二子参数集和目标牵引速度进行处理,以生成支架的目标移架距离和目标收护帮板速度:
[0078]
步骤301,对第二子参数集和目标牵引速度进行预处理,以生成支架的初始移架距离和初始收护帮板速度。
[0079]
在本公开实施例中,参见图4,u(k)可为跟机自动化系统输入,即第二子参数集和目标牵引速度,其中,第二子参数集可包括煤机
‑
支架的相对距离、采煤机速度、工作面环境参数、工作面倾角和支架自身的参数数据等,z(k)可为跟机自动化系统输出(即,跟机自动化系统的支架动作控制输出信号),即支架的初始移架距离和初始收护帮板速度。
[0080]
具体地,在获取上述第二子参数集和目标牵引速度后,可从电子设备的存储空间中调出支架跟机算法模型,并将该第二子参数集和目标牵引速度(即,u(k))输入至该支架跟机算法模型,而后该支架跟机算法模型可调出跟机自动化系统对该第二子参数集和目标牵引速度进行处理,从而通过该跟机自动化系统输出(生成)支架的初始移架距离和初始收
护帮板速度(即,z(k))。
[0081]
步骤302,对初始移架距离和初始收护帮板速度进行动态补偿,以生成目标移架距离和目标收护帮板速度。
[0082]
在本公开实施例中,参见图4,y(k)可为动态补偿后的输出,即,目标移架距离和目标收护帮板速度。其中,支架跟机算法模型可在跟机自动化系统后串联动态补偿环节,可使得y(k)尽量逼近u(k)。
[0083]
其中,可通过elman(一种典型的局部回归网络)神经网络算法构建跟机自动化系统的补偿环节,对上述初始移架距离和初始收护帮板速度进行动态补偿。其中,elman神经网络的结构可参见图5,z(k)=[z1(k),z2(k),
…
,zm(k)]为跟机自动化系统的输出,x(k)=[x1(k),x2(k),
…
,xl(k)]为隐含层输出,c(k)=[c1(k),c2(k),
…
,cl(k)]为承接层输出,y(k)=[y1(k),y2(k),
…
,yn(k)]为动态补偿后输出,k为每组数据点数,m、n、l分别为输入层、隐含层和输出层节点数。w1(k)、w2(k)、w3(k)分别表示隐含层到承接层、输入层到隐含层、隐含层到输出层的连接权值。sigmoid(激活函数)函数作为隐含层神经元的传递函数,可使用误差平方和函数e(k)作为elman网络的学习目标函数,即:e(k)=当学习目标函数e(k)达到最优收敛后,可完成对上述初始移架距离和初始收护帮板速度的动态补偿。
[0084]
具体地,支架跟机算法模型在获取上述初始移架距离和初始收护帮板速度后,可通过动态补偿环节对该初始移架距离和初始收护帮板速度进行动态补偿,以生成目标移架距离和目标收护帮板速度,即,将z(k)输入至动态补偿环节,经过动态补偿后输出y(k)。
[0085]
进一步地,在本公开实施例中,elman神经网络虽然可以解决非线性问题,但是输出准确率与训练速度仍难以满足实际需求,而且容易陷入局部极值的缺陷,样本的依赖度过高。因此,可在其基础上补充遗传算法来优化模型,从而弥补神经网络控制的缺陷。遗传算法可以模拟生物社会中的个体进化,自适应搜索优化问题的最优解,同时还能够进行有效的局部搜索,找出潜在的优化解。遗传算法的自适应能力主要体现在输出的目标移架距离和目标收护帮板速度能否满足现场实际需求,进而调整自身的反馈能力。在进化过程中,如果输出的目标移架距离和目标收护帮板速度可以较好地满足工作面生产要求,并保证其直线度,那就找到了一个较好的进化模式,并且在算法设计中应该尽可能地保留该模式。
[0086]
其中,遗传算法优化elman神经网络的算法步骤可如下:
[0087]
①
、对跟机自动化系统输出数据z(k)进行归一化处理。
[0088]
②
、使用经验公式初拟并结合试凑的方法确定隐含层节点数,经验公式采用下述公式(1):
[0089][0090]
其中,l可为隐含层节点数,m可为输入层节点数,n可为输出层节点数,α可为1~10之间的常数。
[0091]
③
、根据elman网络权值阈值的优化目标,适应度函数为输出值与期望值之间的误差平方和的倒数,即
[0092]
④
、初始化进化次数、种群规模、交叉概率以及变异概率。
[0093]
⑤
、对种群进行实数编码。
[0094]
⑥
、循环进行选择操作、交叉操作、变异操作、计算适应度值等步骤,不断产生新的种群,直到达到进化次数,获得最优权值和阈值。
[0095]
⑦
、将得到的最优权值和阈值更新至elman神经网络,并进行网络训练,满足结束条件即终止。
[0096]
⑧
、用跟机自动化输出数据z(k)测试优化后的elman神经网络,并输出动态补偿结果y(k)。
[0097]
进一步地,在本公开实施例中,通过多次取用现场大量数据做样本进行模型效果分析,ga
‑
elman(遗传算法
‑
局部回归网络)组合模型在训练速度以及预测准确性2个方面都要优于elman神经网络模型和ga(genetic algorithm,遗传算法)模型。其中,ga
‑
elman组合模型的流程图可参见图6,该ga
‑
elman组合模型输出目标移架距离的整体准确率可达到98.4%,且该ga
‑
elman组合模型的回归系数为1,能够较好地拟合非线性环境,使得采煤机目标牵引速度与目标收护帮板速度趋势基本保持一致。由此,能够有效地实现采煤机与支架协同安全作业,使得采煤机速度可控,并且通过增加动态补偿环节,能够提高控制支架移动的准确率,降低移架距离的误差,从而减少工作面自动化作业过程中的人工干预环节或频次。
[0098]
步骤106,根据目标移架距离和目标收护帮板速度对支架进行控制,以及根据目标牵引速度对采煤机进行控制。
[0099]
具体地,在获取上述目标移架距离、目标收护帮板速度和目标牵引速度后,可根据目标移架距离和目标收护帮板速度对支架进行控制,并根据目标牵引速度对采煤机进行控制。
[0100]
在本公开实施例中,首先获取采煤机的第一参数集,并获取支架的第二参数集,以及获取采煤工作面的环境参数集,并根据第一选取策略从第一参数集中选取多个参数,以生成第一子参数集,以及调用采煤机牵引速度模型对第一子参数集进行处理,以生成采煤机的目标牵引速度,而后根据第二选取策略分别从第一参数集、第二参数集和环境参数集中选取多个参数,以生成第二子参数集,并调用支架跟机算法模型对第二子参数集和目标牵引速度进行处理,以生成支架的目标移架距离和目标收护帮板速度,最后根据目标移架距离和目标收护帮板速度对支架进行控制,以及根据目标牵引速度对采煤机进行控制。由此,能够实现采煤机和支架的自动化协同工作,提高支架的自动跟机效果,从而提高自主割煤的效率,并能够提高采煤机截割部的可靠性,延长其使用寿命。
[0101]
在本公开的一个实施例中,如图7所示,采煤机和支架的协同控制方法,还可包括:
[0102]
步骤701,获取煤层的截割阻抗。
[0103]
在本公开实施例中,可通过相关传感器获取采煤机的驱动力矩、负载力矩、截割力、功率、单轴抗压强度、滚筒切入角等参数,并根据这些参数计算出煤层的截割阻抗。
[0104]
步骤702,根据第三选取策略从第一参数集中选取多个参数,以生成第三子参数集。
[0105]
需要说明的是,该实施例中的第三选取策略可根据实际情况和需求进行标定,此处不做任何限定。
[0106]
具体地,在获取上述第一参数集后,可根据第三选取策略从该第一参数集中选取截割部机械传动系统的效率、采煤机截割部电机电压、电机载荷波动系数、电机功率因数、
电机转速、滚筒的截齿数量、截割电机作用半径和截齿在煤层上的投影面积等参数,作为第三子参数集。
[0107]
步骤703,调用采煤机截割牵引模型对第三子参数集和截割阻抗进行处理,以生成采煤机的牵引速度和截割阻抗的第一数据关系。
[0108]
需要说明的是,该实施例中所描述的截割牵引模型可以是提前训练好的,并将其预存在电子设备的存储空间中,以方便调取使用。
[0109]
具体地,在获取上述第三子参数集和截割阻抗后,电子设备可从自身的存储空间中调出采煤机截割牵引模型,并将该第三子参数集和截割阻抗输入至该采煤机截割牵引,从而通过该采煤机截割牵引模型对该第三子参数集和截割阻抗进行处理,以生成采煤机的牵引速度和截割阻抗的第一数据关系。
[0110]
为了清楚说明上一实施例,在本公开的一个实施例中,如图8所示,采煤机截割牵引模型可通过以下步骤对第三子参数集和截割阻抗进行处理,以生成采煤机的牵引速度和截割阻抗的第一数据关系:
[0111]
步骤801,根据第三子参数集和截割阻抗,建立截割阻抗和采煤机截割电机电流的关系公式。
[0112]
在本公开实施例中,在获取上述第三子参数集和截割阻抗后,可建立截割阻抗和采煤机截割电机电流的关系公式,如下述公式(2)。
[0113][0114]
其中,k
a
为无量纲比例系数,η为截割部机械传动系统的效率,u
l
为采煤机截割部电机电压,i
c
为采煤机截割部传动比常数,k
p
为电机载荷波动系数,cosφ为电机功率因数,ω为电机转速,n
jg
为滚筒的截齿数量,r为截割电机作用半径,s
p
为截齿在煤层上的投影面积,i
l
采煤机的电机电流,a
p
为截割阻抗。
[0115]
具体地,在获取上述第三参数集和截割阻抗后,采煤机截割牵引模型可基于截割阻抗和采煤机截割电机电流的关系建立上述公式(2),并可根据该公式(2)计算出全煤煤层、夹矸煤层或煤岩断层工况下采煤机恒定功率条件下的截割阻抗。
[0116]
步骤802,基于采煤机保持恒功率截割的工作状态,并根据关系公式进行解算,以生成第一数据关系。
[0117]
在本公开实施例中,可通过上述公式(2)计算出全煤煤层、夹矸煤层或煤岩断层工况下采煤机恒定功率条件下的截割阻抗,然后可通过下述公式(3)计算出全煤煤层、夹矸煤层或煤岩断层工况下采煤机恒定功率条件下的牵引速度。
[0118][0119]
其中,η可为截割部机械传动系统的效率,i
c
可为采煤机截割部传动比常数,k
p
可为电机载荷波动系数,ω可为电机转速,r可为截割电机作用半径,s
p
可为截齿在煤层上的投影面积,p
em
可为截割电机额定电磁功率,a
p
可为截割阻抗,v为采煤机的牵引速度。
[0120]
具体地,通过上述公式(2)计算出全煤煤层、夹矸煤层或煤岩断层工况下采煤机恒定功率条件下的截割阻抗后,可通过上述公式(3)计算出全煤煤层、夹矸煤层或煤岩断层工
况下采煤机恒定功率条件下的牵引速度,以生成(得到)采煤机的牵引速度和截割阻抗的第一数据关系。
[0121]
步骤704,根据第一数据关系,确定目标牵引速度是否满足第一参数条件。
[0122]
在本公开实施例中,在生成上述第一数据关系后,可根据该第一数据关系生成全煤煤层、夹矸煤层或煤岩断层工况下采煤生产效率和截割比能耗,用于判断目标牵引速度是否满足第一参数条件。需要说明的是,该实施例中所描述的采煤生产效率为单位时间内采煤机每一刀的截割产量,截割比能耗为采煤机滚筒在生产单位煤块产量时消耗的能量。
[0123]
需要说明的是,该实施例中所描述的第一参数条件可根据实际情况进行标定。
[0124]
其中,第一参数条件可如下:在全煤煤层工况下,上述目标牵引速度对采煤机进行控制的采煤生产效率会比上述牵引速度控制采煤机的采煤生产效率提高6%,上述目标牵引速度对采煤机进行控制的截割能耗比会略高于上述牵引速度控制采煤机的截割能耗比,但总体不会超过6.25%;在夹矸煤层工况下,上述目标牵引速度对采煤机进行控制的采煤生产效率会比上述牵引速度控制采煤机的采煤生产效率提高6.18%,上述目标牵引速度对采煤机进行控制的截割能耗比会高于上述牵引速度控制采煤机的截割能耗比,并在截割阻抗达到350kn/m时会大幅度增加;在煤岩断层工况下,上述目标牵引速度对采煤机进行控制的采煤生产效率和截割能耗比与上述牵引速度控制采煤机的采煤生产效率和截割能耗比基本保持一致。
[0125]
具体地,在生成上述第一数据关系以及计算出上述牵引速度和目标牵引速度后,可根据该第一数据关系获取全煤煤层、夹矸煤层或煤岩断层工况下采煤生产效率和截割比能耗,然后判断该目标牵引速度是否满足上述第一参数条件,若是,则目标牵引速度满足该第一参数条件;若否,则目标牵引速度不满足该第一参数条件。
[0126]
步骤705,响应于目标牵引速度不满足第一参数条件,对第一子参数集进行优化,并重新调用采煤机牵引速度模型对优化后的第一子参数集进行处理,以重新生成采煤机的目标牵引速度。
[0127]
在本公开实施例中,若目标牵引速度不满足第一参数条件,则可通过改变第一选取策略重新从第一参数集中选取多个参数,重新生成第一子参数集,以达到优化第一子参数集的目的,或者对上述的第一子参数集中参数的数值进行调整(例如,基于预设的优化策略进行调整)以达到优化第一子参数集的目的,并可重新调用采煤机牵引速度模型对优化后的第一子参数集进行处理,以重新生成采煤机的目标牵引速度。由此,能够实现采煤机目标牵引速度的自适应调整,提高与支架协同工作的效果。
[0128]
具体地,对第一子参数集进行优化后,电子设备可从自身的存储空间中重新调出采煤机牵引速度模型,并将该第一子参数集输入至该采煤机牵引速度模型,从而通过该采煤机牵引速度模型对该第一子参数集进行分析处理,以重新生成采煤机分别在全煤煤层、夹矸煤层和煤岩断层工况下采煤机的恒功率条件下的目标牵引速度。
[0129]
在本公开的一个实施例中,如图9所示,采煤机和支架的协同控制方法,还可包括:
[0130]
步骤901,根据第四选取策略分别从第一参数集、第二参数集和环境参数集中选取多个参数,以生成第四子参数集。
[0131]
需要说明的是,该实施例中所描述的第四选取策略可根据实际情况和需求进行标定,此处不做任何限定。
[0132]
在本公开实施例中,在获取上述第一参数集、第二参数集和环境参数集后,可根据第四选取策略分别从第一参数集、第二参数集和环境参数集中选取工作面长度、支架总数量、采煤机牵引速度与支架移架速度的修正系数和收护帮板的长度等参数作为第四子参数集。
[0133]
步骤902,调用协同控制模型对截割阻抗、第四子参数集和目标牵引速度进行处理,以生成支架的移架距离,以及支架的收护帮板速度和目标牵引速度的第二数据关系。
[0134]
需要说明的是,该实施例中所描述的协同控制模型可以是提前训练好的,并将其预存在电子设备的存储空间中,以方便调取使用。
[0135]
具体地,在获取上述截割阻抗、第四子参数集和目标牵引速度后,电子设备可从自身的存储空间中调出协同控制模型,并将该截割阻抗、第四子参数集和目标牵引速度输入至该协同控制模型,从而通过该协同控制模型对该截割阻抗、第四子参数集和目标牵引速度进行处理,以生成支架的移架距离,以及支架的收护帮板速度和目标牵引速度的第二数据关系。
[0136]
在本公开实施例中,该协同控制模型可通过下述公式(4)计算支架的移架距离。
[0137][0138]
其中,k可为采煤机牵引速度与支架移架速度的修正系数,u可为优化参数,x可为工作面长度,n可为支架总数量,η可为截割部机械传动系统的效率,i
c
可为采煤机截割部传动比常数,k
p
可为电机载荷波动系数,ω可为电机转速,n
jg
可为滚筒的截齿数量,r可为截割电机作用半径,s
p
可为截齿在煤层上的投影面积,a
p
可为截割阻抗,y可为支架的移架距离。
[0139]
具体地,在获取上述截割阻抗、第四子参数集和目标牵引速度后,可通过上述公式(4)计算出支架的移架距离。
[0140]
进一步地,该协同控制模型还可通过下述公式(5)建立收护帮板的速度和目标牵引速度的第二数据关系,并基于该第二数据关系计算收护帮板的速度。
[0141][0142]
其中,r可为护帮板长度,a可为采煤机牵引速度与护帮板转速的比例系数,π可为圆周率,η可为截割部机械传动系统的效率,i
c
可为采煤机截割部传动比常数,k
p
可为电机载荷波动系数,ω可为电机转速,n
jg
可为滚筒的截齿数量,r可为截割电机作用半径,s
p
可为截齿在煤层上的投影面积,a
p
可为截割阻抗,p
em
可为截割电机额定电磁功率,v
l
可为收护帮板的速度。
[0143]
具体地,在获取上述截割阻抗、第四子参数集和目标牵引速度后,可通过上述公式(5)建立护帮板的速度和目标牵引速度的第二数据关系,并通过该公式(5)计算出收护帮板的速度。
[0144]
步骤903,根据移架距离和第二数据关系,确定目标移架距离和目标收护帮板速度是否满足第二参数条件。其中,第二参数条件可根据实际情况进行标定。
[0145]
在本公开实施例中,在获取上述移架距离和第二数据关系后,可根据该移架距离和第二数据关系判断目标移架距离和目标收护帮板速度是否分别在第一误差和第二误差
范围内,若是,则说明支架跟机推移精度较高且采煤机速度与收护帮板速度趋势保持一致,该目标移架距离和目标收护帮板速度满足第二参数条件;若否,则说明目标支架跟机推移精度较低和/或采煤机速度与收护帮板速度趋势不一致,该目标移架距离和目标收护帮板速度不满足第二参数条件。
[0146]
需要说明的是,该实施例中所描述的第一误差范围和第二误差范围可根据实际情况和需求进行标定,此处不做任何限定。
[0147]
步骤904,响应于目标移架距离和目标收护帮板速度不满足第二参数条件,对第二子参数集进行优化,并重新调用支架跟机算法模型对优化后的第二子参数集和目标牵引速度进行处理,以重新生成支架的目标移架距离和目标收护帮板速度。
[0148]
在本公开实施例中,若目标移架距离和目标收护帮板不满足第二参数条件,则可通过改变第二选取策略重新从第一参数集、第二参数集和环境参数集中选取多个参数,重新生成第二子参数集,以达到优化第二子参数集的目的,或者对上述的第二子参数集中参数的数值进行调整(例如,基于预设的优化策略进行调整)以达到优化第二子参数集的目的,并可重新调用支架跟机算法模型对优化后的第二子参数集和目标牵引速度进行处理,以重新生成支架的目标移架距离和目标收护帮板速度。由此,能够实现支架移动和收护帮板的自适应调整,提高与采煤机的协同工作效果。
[0149]
具体地,在对上述第二子参数集进行优化后,电子设备可重新从自身的存储空间中调出支架跟机算法模型,并将该第二子参数集和目标牵引速度输入至该支架跟机算法模型,从而通过该支架跟机算法模型对该第二子参数集和目标牵引速度进行处理,以重新生成支架的目标移架距离和目标收护帮板速度。
[0150]
综上,参见图10,该采煤机和支架的协同控制方法可将采煤机位置、方向、滚筒电流、俯仰角和滚筒温度等参数输入至采煤机自适应调速系统,由该采煤机自适应调速系统调用采煤机牵引速度模型对该参数进行处理,生成目标牵引速度,并调用采煤机截割牵引模型,基于采煤生成率和截割能耗比两个评判指标,对采煤机牵引模型的可靠性进行评判,同时可将工作面参数和支架自身参数等输入至支架跟机自动化系统,由该支架跟机自动化系统调用支架跟机算法模型对该参数进行处理,生成目标移架距离和目标收护帮板速度,并调用协同控制模型,基于支架跟机推移精度和采煤机速度与收护帮板速度趋势两个评判指标,评判支架跟机算法模型的可靠性,最后可基于采煤机与支架的相对距离,根据目标移架距离和目标收护帮板速度对支架进行控制,以及根据目标牵引速度对采煤机进行控制。
[0151]
图11为根据本公开一个实施例的采煤机和支架的协同控制装置的方框示意图。
[0152]
本公开实施例的采煤机和支架的协同控制装置,可配置与电子设备中,以实现获取采煤机的第一参数集,并获取支架的第二参数集,以及获取采煤工作面的环境参数集,并根据第一选取策略从第一参数集中选取多个参数,以生成第一子参数集,以及调用采煤机牵引速度模型对第一子参数集进行处理,以生成采煤机的目标牵引速度,而后根据第二选取策略分别从第一参数集、第二参数集和环境参数集中选取多个参数,以生成第二子参数集,并调用支架跟机算法模型对第二子参数集和目标牵引速度进行处理,以生成支架的目标移架距离和目标收护帮板速度,最后根据目标移架距离和目标收护帮板速度对支架进行控制,以及根据目标牵引速度对采煤机进行控制,从而能够实现采煤机和支架的自动化协同工作,提高支架的自动跟机效果,进而提高自主割煤的效率,并能够提高采煤机截割部的
可靠性,延长其使用寿命。
[0153]
如图11所示,该采煤机和支架的协同控制装置1100,可包括:第一获取模块1110、第一生成模块1120、第一处理模块1130、第二生成模块1140、第二处理模块1150和控制模块1160。
[0154]
其中,第一获取模块1110,用于获取采煤机的第一参数集,并获取支架的第二参数集,以及获取采煤工作面的环境参数集。
[0155]
第一生成模块1120,用于根据第一选取策略从第一参数集中选取多个参数,以生成第一子参数集。
[0156]
第一处理模块1130,用于调用采煤机牵引速度模型对第一子参数集进行处理,以生成采煤机的目标牵引速度。
[0157]
第二生成模块1140,用于根据第二选取策略分别从第一参数集、第二参数集和环境参数集中选取多个参数,以生成第二子参数集。
[0158]
第二处理模块1150,用于调用支架跟机算法模型对第二子参数集和目标牵引速度进行处理,以生成支架的目标移架距离和目标收护帮板速度。
[0159]
控制模块1160,用于根据目标移架距离和目标收护帮板速度对支架进行控制,以及根据目标牵引速度对采煤机进行控制。
[0160]
在本公开的一个实施例中,采煤机和支架的协同控制装置1100,还可包括:第二获取模块、第三生成模块、第三处理模块、第一确定模块和第一重新处理模块。
[0161]
其中,第二获取模块,用于获取煤层的截割阻抗。
[0162]
第三生成模块,用于根据第三选取策略从第一参数集中选取多个参数,以生成第三子参数集。
[0163]
第三处理模块,用于调用采煤机截割牵引模型对第三子参数集和截割阻抗进行处理,以生成采煤机的牵引速度和截割阻抗的第一数据关系。
[0164]
第一确定模块,用于根据第一数据关系,确定目标牵引速度是否满足第一参数条件。
[0165]
第一重新处理模块,用于响应于目标牵引速度不满足第一参数条件,对第一子参数集进行优化,并重新调用采煤机牵引速度模型对优化后的第一子参数集进行处理,以重新生成采煤机的目标牵引速度。
[0166]
在本公开的一个实施例中,采煤机和支架的协同控制装置1100,还可包括:第四生成模块、第四处理模块、第二确定模块、第二确定模块和第二重新处理模块。
[0167]
其中,第四生成模块,用于根据第四选取策略分别从第一参数集、第二参数集和环境参数集中选取多个参数,以生成第四子参数集。
[0168]
第四处理模块,用于调用协同控制模型对截割阻抗、第四子参数集和目标牵引速度进行处理,以生成支架的移架距离,以及支架的收护帮板速度和目标牵引速度的第二数据关系。
[0169]
第二确定模块,用于根据移架距离和第二数据关系,确定目标移架距离和目标收护帮板速度是否满足第二参数条件。
[0170]
第二重新处理模块,用于响应于目标移架距离和目标收护帮板速度不满足第二参数条件,对第二子参数集进行优化,并重新调用支架跟机算法模型对优化后的第二子参数
集和目标牵引速度进行处理,以重新生成支架的目标移架距离和目标收护帮板速度。
[0171]
本公开实施例提供的采煤机和支架的协同控制装置,通过第一获取模型获取采煤机的第一参数集,并获取支架的第二参数集,以及获取采煤工作面的环境参数集,并通过第一生成模块根据第一选取策略从第一参数集中选取多个参数,以生成第一子参数集,以及通过第一处理模型调用采煤机牵引速度模型对第一子参数集进行处理,以生成采煤机的目标牵引速度,而后通过第二生成模块根据第二选取策略分别从第一参数集、第二参数集和环境参数集中选取多个参数,以生成第二子参数集,并通过第二处理模块调用支架跟机算法模型对第二子参数集和目标牵引速度进行处理,以生成支架的目标移架距离和目标收护帮板速度,最后通过控制模块根据目标移架距离和目标收护帮板速度对支架进行控制,以及根据目标牵引速度对采煤机进行控制。由此,能够实现采煤机和支架的自动化协同工作,提高支架的自动跟机效果,从而提高自主割煤的效率,并能够提高采煤机截割部的可靠性,延长其使用寿命。
[0172]
为了实现上述实施例,如图12所示,本发明还提出一种电子设备1200,包括存储器1210、处理器1220及存储在存储器1210上并可在处理器1220上运行的计算机程序,处理器1220执行程序,以实现本公开前述实施例提出的采煤机和支架的协同控制方法。
[0173]
本公开实施例的电子设备,通过处理器执行存储在存储器上的计算机程序,能够实现采煤机和支架的自动化协同工作,提高支架的自动跟机效果,从而提高自主割煤的效率,并能够提高采煤机截割部的可靠性,延长其使用寿命。
[0174]
在本说明书的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本公开的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0175]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本公开的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0176]
尽管上面已经示出和描述了本公开的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本公开的限制,本领域的普通技术人员在本公开的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。