1.本发明涉及一种系统,尤其涉及一种识别与判别系统。
背景技术:
2.在现代科技发展日新月异的情况下,越来越多机电装置应用于生产线、物件加工、仓储等领域,例如:移动平台、机械手臂、运输装置、机器人、自动导引车等。并且,利用不同的机电装置排列成不同的排列位置,藉以达到不同的预设功能。
3.然而,现有技术中,并无法在机电装置排列成错误的排列位置而无法达到任何预设功能时,提供适当的校正信息;也无法在机电装置排列出正确的排列位置时,提供该排列位置所对应到的预设功能,使得使用者无法得知该排列位置所对应到的预设功能是否符合使用者的需求。举例来说,使用者希望达到包装的预设功能,可是使用者可能误将机电装置排列成可以达到加工的预设功能的排列位置,此时,虽然排列位置有对应的预设功能,但并不符合使用者的需求。因此,现有技术具有改善的空间。
技术实现要素:
4.有鉴于在现有技术中,无法在机电装置的排列位置无法达到任何预设功能时提供适当的信息,也无法显示机电装置的排列位置所对应的预设功能所衍生出的种种问题。本发明的一主要目的为提供一种识别与判别系统,用以解决现有技术中的至少一个问题。
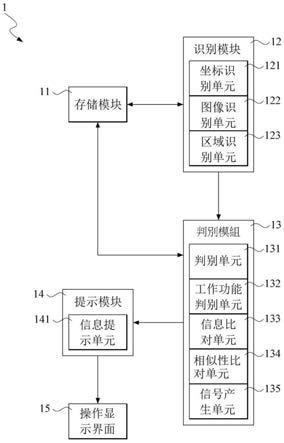
5.本发明为解决现有技术的问题,所采用的必要技术手段为提供一种识别与判别系统,用以判断多个设备所形成的一目前排列位置,每一设备具有一识别数据,藉以使设备具有多个上述的识别数据,识别与判别系统包含一存储模块、一识别模块、一判别模块与一提示模块。
6.存储模块用以存储多个对应多个预设功能的预设排列位置与设备的识别数据。识别模块通信连结存储模块,用以识别设备以及设备所形成的目前排列位置。判别模块通信连结识别模块与存储模块,用以接收目前排列位置且判别目前排列位置与预设排列位置,并据以产生一提示信号。提示模块通信连结判别模块,用以接收提示信号,并据以产生一提示信息。
7.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使识别与判别系统中的判别模块,包含一判别单元与一信号产生单元。判别单元用以在判别目前排列位置与预设排列位置中的一者相符合时,产生一符合信号;在判别目前排列位置与预设排列位置皆相异时,产生一相异信号。信号产生单元电性连接判别单元,用以在接收到符合信号时,产生提示信号中的一正确提示信号;在接收到相异信号时,产生提示信号中的一错误提示信号。
8.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使识别与判别系统中的提示模块,包含一信息提示单元,且信息提示单元用以在接收到正确提示信号时,产生提示信息中的一功能提示信息;在接收到错误提示信号时,产生提示信息中的一排列
错误提示信息;其中,功能提示信息包含目前排列位置所对应符合的预设排列位置中的上述一者的预设功能。
9.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使识别与判别系统中的判别模块,还包含一信息比对单元,信息比对单元电性连接信息提示单元与存储模块,用以在接收到相异信号时比对目前排列位置与预设排列位置,藉以使信息提示单元产生的错误提示信息包含与目前排列位置具有相似性的预设排列位置中的至少一者。
10.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使识别与判别系统中的判别模块,还包含一相似性比对单元,相似性比对单元电性连接信息比对单元,用以比对目前排列位置与预设排列位置中的该至少一者的相似性,藉以信息提示单元产生的使错误提示信息依照相似性高低依序包含预设排列位置中的该至少一者。
11.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使识别与判别系统中的识别模块,包含一坐标识别单元,坐标识别单元用以识别每一该些设备的一位置坐标,藉以识别出设备所形成的目前排列位置。
12.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使识别与判别系统中的设备包含多个工作设备与多个辅具,每一工作设备具有多个工作功能,判别模块还包含一工作功能判别单元,工作功能判别单元用以在目前排列位置与预设排列位置中的上述一者相符时,进一步判别每一工作设备在预设功能中所执行的工作功能中的一者,藉以使信息提示单元产生的功能提示信息还包含每一工作设备在预设功能中所执行的所述多个工作功能中的上述一者。
13.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使识别与判别系统,还包含一操作显示界面,且操作显示界面通信连结提示模块,用以显示提示信息。
14.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使识别与判别系统中的识别模块,包含一图像识别单元,且图像识别单元利用图像识别设备与目前排列位置。
15.承上所述,本发明所提供的识别与判别系统,利用存储模块、识别模块、判别模块与提示模块,相较于现有技术,可以依据设备的目前排列位置,产生相对应的提示信息,藉以解决现有技术无法在目前排列位置与预设排列位置不符时给予提示信息以及无法在目前排列位置与预设排列位置相符时给予关于预设功能的提示信息等问题。
附图说明
16.图1为显示本发明较佳实施例所提供的识别与判别系统的方块图;
17.图2为显示本发明较佳实施例所提供的识别与判别系统的功能提示信息示意图;
18.图3为显示本发明较佳实施例所提供的识别与判别系统的排列错误提示信息示意图;
19.图4为显示本发明较佳实施例所提供的识别与判别系统所判断的一目前排列位置的示意图;
20.图5为显示本发明较佳实施例所提供的识别与判别系统所判断的另一目前排列位置的示意图;
21.图6为显示本发明较佳实施例所提供的识别与判别系统所判断的又一目前排列位
置的示意图;以及
22.图7为显示图6的另一视角的示意图。
23.附图标号说明:
24.1:识别与判别系统
25.11:存储模块
26.12:识别模块
27.121:坐标识别单元
28.122:图像识别单元
29.123:区域识别单元
30.13:判别模块
31.131:判别单元
32.132:工作功能判别单元
33.133:信息比对单元
34.134:相似性比对单元
35.135:信号产生单元
36.14:提示模块
37.141:信息提示单元
38.15:操作显示界面
39.200,200a,200b:设备
40.21,21a,21b,21c,22,24,25:工作设备
41.31,31a,31b,31c,31d,31e,31f,31g,31h,31i,31j,31k,31m,31n,31o,31p,31q,31r,32,33,34:辅具
42.a1,a2,a3,a4:识别区域
43.d1:第一方向
44.d2:第二方向
45.d3:第三方向
46.o,oa,ob:物件
47.p:平台
48.w:轮子
具体实施方式
49.下面将结合示意图对本发明的具体实施方式进行更详细的描述。根据下列描述和权利要求,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
50.请参阅图1,图1为显示本发明较佳实施例所提供的识别与判别系统的方块图。如图所示,一种识别与判别系统1包含一存储模块11、一识别模块12、一判别模块13与一提示模块14,用以判断多个设备所形成的一目前排列位置。其中,每一个设备具有一识别数据。
51.存储模块11用以存储多个对应多个预设功能的预设排列位置以及所有设备的识别数据,如表一所示。存储模块11可为存储器、数据库或是其他具有存储功能的芯片或器
件。
[0052][0053]
表一
[0054]
需说明的是,上述表格内的名称仅为设备的代号,而设备又可以分为工作设备与辅具,其中,表格内的delta、scara与六轴为工作设备,实务上为三种不同的机械手臂,表格内的输送机、电梯与仓储则为辅具。
[0055]
识别模块12通信连结存储模块11,用以利用存储模块11中的识别数据识别设备及其所形成的目前排列位置。在本实施例中,识别模块12包含一坐标识别单元121、一图像识别单元122与一区域识别单元123。
[0056]
判别模块13通信连结识别模块12与存储模块11,用以接收设备的目前排列位置,且判别目前排列位置与所有预设排列位置,并据以产生一提示信号。在本实施例中,判别模块13包含一判别单元131、一工作功能判别单元132、一信息比对单元133、一相似性比对单元134与一信号产生单元135。
[0057]
提示模块14通信连结判别模块13,用以接收提示信号,并据以产生一提示信息。在本实施例中,提示模块14包含一信息提示单元141。
[0058]
在本实施例中,识别与判别系统1还包含一操作显示界面15。操作显示界面15通信连结提示模块14,用以显示提示信息。
[0059]
接着,请一并参阅图1至图7,其中,图2为显示本发明较佳实施例所提供的识别与判别系统的功能提示信息示意图;图3为显示本发明较佳实施例所提供的识别与判别系统的排列错误提示信息示意图;图4为显示本发明较佳实施例所提供的识别与判别系统所判断的一目前排列位置的示意图;图5为显示本发明较佳实施例所提供的识别与判别系统所判断的另一目前排列位置的示意图;图6为显示本发明较佳实施例所提供的识别与判别系统所判断的又一目前排列位置的示意图;以及,图7为显示图6的另一视角的示意图。
[0060]
判别单元131用以在判别目前排列位置与如表一中的预设排列位置中的一者相符合时,产生一符合信号。信号产生单元135电性连接判别单元131,用以在接收到符合信号时,产生提示信号中的一正确提示信号。信息提示单元141用以在接收到正确提示信号时,产生提示信息中的一功能提示信息。判别单元131目前排列位置与第一加工的预设排列位置以及第二加工的预设位置相同时,信息提示单元141产生的功能提示信息便会同时包含所有符合的预设功能,如图2所示。
[0061]
相反的,当判别单元131判别目前排列位置与如表一中的所有预设排列位置皆相
异时,便会产生一相异信号。信号产生单元135则会据以产生提示信号中的一错误提示信号。信息提示单元141用以在接收到错误提示信号时,产生提示信息中的一排列错误提示信息。
[0062]
在本实施例中,信息比对单元133会在接收到判别单元131产生的相异信号时,比对目前排列位置与所有的预设排列位置,藉以使得排列错误提示信息中包含至少一与目前排列位置具有相似性的预设排列位置。
[0063]
相似性可以指设备种类具有相似或是设备位置具有相似。如图3所示,目前排列位置与所有预设排列位置皆相异,但是可以确定目前排列位置的设备种类与预设功能全机台的预设排列位置的设备种类完全相同,而且,各设备的位置也仅在顺位三与顺位四有所差异。因此,信息比对单元133会认为目前排列位置与预设功能全机台的预设排列位置具有相似性,且是高度的相似性。
[0064]
在本实施例中,相似性比对单元134还会进一步比对目前排列位置与预设排列位置的相似性,藉以使得排列错误提示信息中会依照相似性的高低,依序排列出与目前排列位置具有相似性的预设排列位置,藉以让使用者可以得知设备的目前排列位置与哪些预设功能的预设排列位置具有相似性及其相似性高低。
[0065]
更详细的说明,假设目前排列位置为“输送机、scara、六轴、scara”,相似性比对单元134若以设备的种类作为相似性高低的主要判断因素,则排列错误提示信息显示的预设排列位置顺序会如表二。因为在预设功能模拟pcb部分制程中,其设备种类与目前排列位置的设备种类相同的数量有4个,故相似性较高。
[0066][0067]
表二
[0068]
假设目前排列位置为“输送机、delta、scara、六轴”,相似性比对单元134若以设备的位置作为相似性高低的主要判断因素,则排列错误提示信息显示的预设排列位置顺序会如表三。
[0069][0070]
表三
[0071]
此外,相似性比对单元134也可利用多重判断因素进行判断,例如在设备种类相同数量一样时,进一步利用设备位置相同数量进行相似性的判断,藉以依照相似性高低排序出预设功能的预设排列位置。
[0072]
图4至图7为设备排列完成的三种目前排列位置,其中,图7与图6的目前排列位置相同,差别仅在于视角的不同。
[0073]
识别模块12会利用坐标识别单元121去识别所有设备的位置坐标,藉以识别出设备所形成的目前排列位置,但不以此为限。识别模块12也可以通过图像识别单元122利用图像识别的方式识别出设备的目前排列位置。
[0074]
在图4中,设备200可分为工作设备21a、21b、21c、22与辅具31、31a、31b、31c、31d、31e,并设置于多个识别区域a1、a2、a3、a4的多个平台p上,且每个平台p都具有轮子w以方便使用者移动排列。其中,工作设备21a、21b、21c即为表一内的六轴,也就是一种具有六轴移动方向的机械手臂;工作设备22则是表一内的scara,也是一种机械手机;辅具31则是一种夹紧结构。此外,辅具31a、31b、31c、31d、31e在此都是输送机。
[0075]
区域识别单元123会识别每个识别区域a1、a2、a3、a4,当识别区域a1、a2、a3、a4同时存在工作设备与辅具时,会将该识别区域中的辅具的位置坐标删除,并利用该识别区域中剩余的工作设备的位置坐标识别出设备所形成的目前排列位置。
[0076]
以图4来说,识别区域a1同时存在工作设备21a与辅具31a、31b,区域识别单元123便会将辅具31a、31b的位置坐标删除,使得坐标识别单元121仅会识别与利用工作设备21a的位置坐标。而识别区域a4仅存在工作设备21c,区域识别单元123便不会作动,坐标识别单元121则会识别与利用工作设备21c的位置坐标。设备200的目前排列位置与预设功能第一加工的预设排列位置相符合。
[0077]
每个工作设备具有多个工作功能,如表四所示。工作功能判别单元132会在目前排列位置与预设排列位置相符时,进一步判别每个工作设备在预设功能中所执行的工作功能,藉以使得功能提示信息中,包含各工作设备所执行的工作功能
[0078][0079]
表四
[0080]
在图4中,工作设备21a执行的工作功能为上下料;工作设备21b执行的工作功能为焊接;工作设备22执行的工作功能为搬运;工作设备21c执行的工作功能为喷涂。因此,一物件o可以大致沿一第一方向d1,依序经过所有设备200,完成第一加工的预设功能。
[0081]
在图5中,设备200a的目前排列位置与预设功能第二加工的预设排列位置相符。设备200a包含工作设备21a、21b、21c、24与辅具31f、31g、31h、31i、31j、31k。工作设备24为一镜头,用以检测一物件oa。工作设备21a执行的工作功能为辅助检测;工作设备21b执行的工作功能为组装;工作设备21c执行的工作功能为搬运。因此,物件oa可以大致沿第一方向d1依序经过所有设备200a,完成第二加工的预设功能。
[0082]
在图6与图7中,设备200b的目前排列位置与预设功能全机台的预设排列位置相
符。设备200b包含工作设备21、22、24、25与辅具31m、31n、31o、31p、31q、31r、32、33、34。其中,工作设备25即为表一内的delta,也是一种机械手臂。辅具33为一电梯,辅具34则为一仓储。
[0083]
在图6与图7中,工作设备21所执行的工作功能为辅助检测;工作设备22所执行的工作功能为搬运;工作设备25所执行的工作功能为辅助检测。一物件ob可沿第一方向d1、一第二方向d2或一第三方向d3经过设备200b,以完成全机台的预设功能。
[0084]
实务上,物件ob经过辅具31r后,可能会沿第一方向d1或第二方向d2移动。物件ob会经由工作设备21、24辅助检测,并依据辅助检测结果决定送往第一方向d1或第二方向d2。被送往第一方向d1的物件ob会由工作设备22进行夹取搬运。被送往第二方向d2的物件ob则会由工作设备25进行堆迭、组装,再经由辅具31o、31p搬运至辅具33。进入辅具33的物件ob便会沿第三方向移动至辅具34存储,途中还会经过辅具31q。在本实施例中,辅具34是一抬升机构与一置物架的组成。此外,工作功能判别单元132也可以通过各个工作设备旁边的辅具,辅助判断此工作设备在此的功能。
[0085]
综上所述,本发明所提供的识别与判别系统,利用存储模块、识别模块、判别模块与提示模块,相较于现有技术,可以依据设备的目前排列位置,产生相对应的提示信息,藉以解决现有技术无法在目前排列位置与预设排列位置不符时给予提示信息以及无法在目前排列位置与预设排列位置相符时给予关于预设功能的提示信息等问题。
[0086]
通过以上较佳具体实施例的详述,希望能更加清楚描述本发明特征与精神,而并非以上述所揭示的较佳具体实施例来对本发明的范畴加以限制。相反地,其目的是希望能涵盖各种改变及具相等性的安排于本发明所欲申请的权利要求的范畴内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。