1.本发明涉及声表面波微流控领域,更具体的说是一种声表面波驱动的微液滴移动速度与方向控制方法。
背景技术:
2.在化学分析、生物医学等需要对微小样品试剂进行处理分析的研究中,使用微流控技术在尺寸为几平方厘米的芯片上操纵微量流体,不仅可以降低样品成本和处理时间,还可以进行高灵敏度、高分辨率的分离和检测。对微液滴的操控是微流控技术的一个重要分支,在各种用于驱动基片表面液滴的方法中,基于声表面波的液滴驱动技术具有便于集成化、对试剂的低污染性、可编程性等优点,具有良好的发展前景。
技术实现要素:
3.本发明的目的是提供一种声表面波驱动的微液滴移动速度与方向控制方法,可以实现对微液滴移动速度与方向的控制。
4.本发明的目的通过以下技术方案来实现:
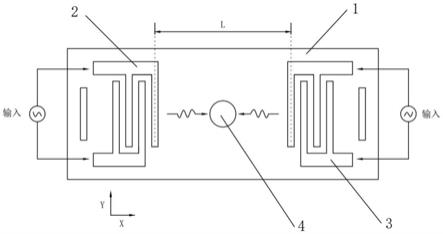
5.一种声表面波发生装置,该装置包括压电基片和分别设置在压电基片两侧的叉指换能器ⅰ和叉指换能器ⅱ,压电基片为铌酸锂材料;
6.一种声表面波驱动的微液滴移动速度与方向控制方法,在铌酸锂压电基片表面激发出声表面行波和声表面驻波的混合波,改变激励相位差θ这一个参数,调节声表面行波分量,从而实现对微液滴移动速度与方向的控制,其中铌酸锂的化学式为linbo3,声表面行波分量记作twr;
7.给压电基片上的叉指换能器ⅰ和叉指换能器ⅱ同时施加幅值与频率相同但具有一定相位差的激励信号,在压电基片上激励出声表面行波和声表面驻波的混合波,调节信号的激励相位差,可以改变混合波中的行波成份,从而实现微液滴移动速度与方向的控制,其中微液滴体积为0.2~2μl;
8.进一步的,所述激励信号为施加在叉指换能器ⅰ和叉指换能器ⅱ上的高频正弦电信号,根据微液滴移动所需的最大速度确定激励信号的幅值,激励信号的频率为实际可以激励出最大幅值声表面波的谐振频率,两路信号之间的激励相位差可以连续调节,其中高频为1mhz~150mhz;
9.进一步的,对压电基片表面各质点的振动位移进行分析,设叉指换能器ⅰ和叉指换能器ⅱ各自的第一个叉指指条中心线间的距离为l,空间相位差为α,叉指换能器ⅰ和叉指换能器ⅱ上的信号激励相位差为θ,写出在任意时刻t,基片表面位于位置x处质点在z方向上的声表面波振动位移方程z(x,t),对方程z(x,t)进行求导,可以得到基片表面质点在z方向上振动的最大幅值和最小幅值
10.进一步的,定义基片表面质点z方向上振动的最小振幅与最大振幅的比值为声表面行波分量,可用于描述声表面波中的行波成份,其值与空间相位差α和激励相位差θ有关;
当压电基片上的叉指换能器ⅰ和叉指换能器ⅱ安装好之后,两个叉指换能器各自的第一个叉指指条中心线间的距离l是确定的,在不改变激励信号频率f的情况下,空间相位差α也会保持不变,声表面行波分量是一个只与激励相位差θ有关的函数;声表面行波分量的英文为travelingwaveratio;
11.进一步的,声表面行波分量是一个信号激励相位差θ的单值函数,并且是关于θ以2π为周期的周期函数,调节θ可以改变声表面行波分量的值;
12.进一步的,由于行波可以驱动微液滴移动,所以通过调节θ改变声表面行波分量的大小与方向,进而控制微液滴移动速度与方向。
13.本发明一种声表面波驱动的微液滴移动速度与方向控制方法具备以下有益效果:
14.1、给出了基片表面质点的声表面波振动方程,得到了质点最大振幅与最小振幅,得到了声表面行波分量的理论计算公式,提出了调节声表面行波分量的方法;
15.2、提出了只调节激励相位差θ一个参数实现的控制微液滴移动速度的方法。其实质是通过调节θ改变声表面混合波中行波成份的大小,进而改变微液滴的移动速度,在纯行波状态下微液滴移动速度最大;
16.3、提出了改变激励信号相位差θ所在区间,控制微液滴移动方向的方法,其实质是在确定的空间相位差α下,通过改变θ的取值范围(0<θ<π和π<θ<2π),改变声表面行波的传播方向,实现微液滴移动方向的改变。
附图说明
17.下面结合附图和具体实施方法对本发明做进一步详细的说明。
18.图1是本发明的声表面波发生装置结构示意图一;
19.图2是本发明的声表面波发生装置结构示意图二;
20.图3是本发明的基片表面各质点的最小振幅与最大振幅的比值随着激励相位差θ变化的曲线图一;
21.图4是本发明的基片表面各质点的最小振幅与最大振幅的比值随着激励相位差θ变化的曲线图二。
22.图中:压电基片1;叉指换能器ⅰ2;叉指换能器ⅱ3;微液滴4。
具体实施方式
23.下面结合附图对本发明作进一步详细说明。
24.结合附图1和2所示,下面对一种声表面波发生装置的结构和功能进行描述,该装置包括压电基片和分别设置在压电基片1两侧的叉指换能器ⅰ2和叉指换能器ⅱ3,压电基片1为铌酸锂材料;确定由压电基片1及叉指换能器ⅰ2和叉指换能器ⅱ3组成的声表面波微操控器件的设计参数,在压电基片1上制备叉指换能器ⅰ2和叉指换能器ⅱ3,利用声表面波微操控器件的带通滤波特性对叉指换能器ⅰ2和叉指换能器ⅱ3进行测试,确定实际可激励出最大振幅表面波的谐振频率,即叉指换能器ⅰ2和叉指换能器ⅱ3的激励信号频率;
25.激励信号为施加在叉指换能器ⅰ2和叉指换能器ⅱ3上的正弦电压信号,该激励信号由自制声表面波发生器提供,且激励信号的频率、幅值和两路信号之间的相位差可调节,幅值由微液滴4所需移动速度确定,两路信号之间的激励相位差可连续调节;
26.结合附图2和4所示,下面对一种声表面波驱动的微液滴移动速度与方向控制方法的远离和过程进行描述,对压电基片1表面各质点的振动位移进行分析,设叉指换能器ⅰ2和叉指换能器ⅱ3第一个叉指指条中心线的距离为l,叉指换能器ⅰ2和叉指换能器ⅱ3上的激励相位差为θ。假设一端idt激励出的入射声表面波传播至另一端idt后会全反射回来。叉指换能器ⅰ2产生行波,再经另一端全反射回来,入射波与反射波叠加形成声表面驻波1#;同理,叉指换能器ⅱ3形成声表面驻波2#,声表面驻波1#和2#叠加后,写出在任意时刻t,压电基片1表面位于位置x处质点在z方向上的振动位移方程z(x,t),对方程z(x,t)进行求导,可以得到压电基片1表面各质点在z方向上振动的最大振幅和最小振幅具体的推导过程如下:
27.压电基片1上位于x处的质点在时刻t沿着z方向振动的位移为:
28.z(x,t)=2a0[cosωtcoskx cos(ωt θ)cos(kx kl)]
ꢀꢀ
(1)
[0029]
式(1)中a0为振动幅值,ω为叉指换能器ⅰ2和叉指换能器ⅱ3激励信号的圆频率,k为基片1上声表面波振动的波数,θ为两路信号之间的激励相位差,l为叉指换能器ⅰ2和叉指换能器ⅱ3各自的第一个叉指指条中心线间的距离。定义空间相位差其中c和f分别为基片中波传播的速度和频率,n取整数,使α∈[0,2π]。
[0030]
为了求得最大幅值和最小幅值需要求解二元函数z(x,t)的极值,令m=coskx,n=cos(kx α),式(1)可改写为:
[0031]
z(x,t)=2a0[mcosωt ncos(ωt θ)]
ꢀꢀ
(2)
[0032]
对式(2)进行化简处理,并代入m和n的表达式可得:
[0033][0034]
由式(3)可知,当时,压电基片1表面任意位置x的质点沿着z方向的振动位移极值:
[0035][0036]
由m=coskx,n=cos(kx α)可知,此时幅值为只关于x的单值函数,将m和n代入式(4)可得:
[0037][0038]
为寻找压电基片1表面质点在z方向上振动幅值的极值,令的导数为零:
[0039][0040]
可得振动位移极值的条件满足下式:
[0041]
sin(2kx α)(cosα cosθ)=0
ꢀꢀ
(7)
[0042]
其中α为空间相位差(α在0~2π之间变化,当叉指换能器ⅰ2和叉指换能器ⅱ3第一个叉指指条中心线间的距离l增加一个波长λ,α增加2π),θ为激励相位差(θ在0~2π之间变
化,通过设置声表面波发生器两路信号的激励相位差来调节θ)。
[0043]
根据式(7)可以获得振幅极值的位置,以及激励相位差:
[0044]
(a)当(cosα cosθ)≠0时,压电基片1表面z向振动位移取极值位置。
[0045]
根据式(7)可知,此时sin(2kx α)=0,可得压电基片1表面振动位移极值的位置:
[0046][0047]
将式(8)代入式(5),归一化后,可得压电基片1表面质点振动位移极值为和
[0048]
压电基片1表面振动位移最大值:
[0049][0050]
压电基片1表面振动位移最小值:
[0051][0052]
式(9)和(10)中θ1和θ2为压电基片1表面质点振动幅值相等,时的两个θ值,即压电基片1表面形成纯行波的两个θ值,可通过求解方程的两个θ值,即压电基片1表面形成纯行波的两个θ值,可通过求解方程得到θ1和θ2为值:
[0053]
当0<α<π时θ1=π
‑
α,θ2=π α
[0054]
当π<α<2π时θ1=α
‑
π,θ2=3π
‑
α
ꢀꢀ
(11)将式(11)所得θ值代入式(10),得形成纯行波时质点振动幅值为将式(11)所得θ值代入式(10),得形成纯行波时质点振动幅值为
[0055]
(b)当(cosα cosθ)=0时,压电基片1表面任何位置都满足极值条件,由式(7)和式(5)可知,此时压电基片1表面各质点振动幅值相等,即压电基片1表面形成纯声表面行波,且可通过式(7)和(5)求得基片1表面质点的振动幅值与(a)中结果一样,也是sinα,求解方程(cosα cosθ)=0可得:
[0056]
当0<α<π时θ1=π
‑
α,θ2=π α
[0057]
当π<α<2π时θ1=α
‑
π,θ2=3π
‑
α
ꢀꢀ
(12)
[0058]
由式(11)和式(12)可以看出,(a)和(b)两种情况下,压电基片1表面形成纯声表面行波的条件相同。
[0059]
进一步的,空间相位差α是由两叉指换能器第一个叉指指条中心线间距离l、压电基片1上声表面波声速c、激励信号频率f共同决定的,当叉指换能器在压电基片1上制备好
以后,空间相位差α为确定的值。确定的空间相位差α可由计算得到。
[0060]
进一步的,在激励信号的作用下,压电基片1上形成声表面波,其中行波与驻波成份的比值用基片表面质点振动位移的最小幅值与最大幅值之比表示,定义为声表面行波分量,记为twr:
[0061][0062]
将式(9)和(10)代入式(13)可得:
[0063][0064]
由式(14)可知,声表面行波分量与空间相位差α和激励相位差θ有关,当空间相位差α确定以后,声表面行波分量是只关于θ的单值函数,是关于θ以2π为周期的周期函数,通过改变两路信号的激励相位差θ,可以达到调节声表面行波分量的目的。当压电基片1表面为纯行波时,各质点振动幅值相等,声表面行波分量数值为1;当基片表面形成纯驻波时,最小幅值为0,行波分量twr数值为0。
[0065]
进一步的,叉指换能器ⅰ2和叉指换能器ⅱ3同时施加激励信号的模式下,压电基片1表面产生的是声表面波行波与声表面波驻波的混合波,微液滴4移动的驱动力来自于行波,驻波对微液滴4没有驱动作用。混合波中的声表面行波成分越多,对微液滴4移动的驱动作用越大,微液滴4移动速度越快。
[0066]
压电基片1表面形成纯声表面行波时,声表面行波分量数值为1,微液滴4移动速度最快;基片表面形成纯声表面驻波时,声表面行波分量数值为0,微液滴4不移动。声表面行波分量为激励相位差θ的单值函数,激励相位差θ可连续调节,声表面行波分量的值越接近1,行波成份越大,微液滴4的移动速度越快;声表面行波分量的值越接近0,行波的成份越小,微液滴4的移动速度越慢。
[0067]
进一步的,对微液滴4的速度调节原理作进一步说明,图3至4为不同空间相位差下,压电基片1表面各质点的最小振幅与最大振幅的比值随着激励相位差θ变化的曲线图,即声表面行波分量随着激励相位差θ变化的曲线图。由图2
‑
4可以看出,在0<θ<2π,存在两个声表面行波分量值为1的点θ1和θ2,对应图2
‑
3中行波点1和行波点2,当0<α<π时,θ1=π
‑
α,θ2=π α;当π<α<2π时,θ1=α
‑
π,θ2=3π
‑
α。在0<θ<2π,存在两个声表面行波分量值为0的点θ=0、π,对应图2
‑
4中驻波点1、驻波点2。
[0068]
微液滴4的速度控制方法为:调节激励相位差为θ1或θ2,对应图2
‑
4中的行波点1和行波点2,声表面行波分量为1,压电基片1表面振动为纯行波,微液滴4的驱动速度最大,调节激励相位差θ=0、π、2π,对应图2
‑
4中驻波点1、驻波点2,声表面行波分量为0,微液滴4的驱动速度为0。将激励相位差θ由形成纯驻波的值调向形成纯行波的值,微液滴4的驱动速度
将增大,反之驱动速度减小。
[0069]
进一步的,对微液滴4的方向控制原理作进一步说明,在θ∈(0,π)和θ∈(π,2π)两个区间内各有一个形成纯行波的θ取值,即θ1和θ2,这两个θ取值下压电基片1表面形成纯行波的传播方向是相反的,沿着x正方向或x负方向,又因为θ连续变化时,行波传播方向只有经过两个形成纯驻波的θ取值(θ=0、π)才会改变,所以,在θ∈(0,π)和θ∈(π,2π)两个区间内,声表面行波的传播方向相反。激励相位差θ在不同区间时行波传播方向的具体分析如下:
[0070]
当空间相位差α∈(0,π),激励相位差为形成纯行波的θ值时,将该θ值代入式(1)并做归一化处理可得到压电基片1表面质点的振动位移,结果如下:
[0071][0072]
由式(15)可知,当激励相位差θ=θ1,行波沿着x正方向传播;当激励相位差θ=θ2,行波沿着x负方向传播。
[0073]
当空间相位差α∈(π,2π),激励相位差为形成纯行波的θ值时,将该θ值代入式(1)并做归一化处理可得到压电基片1表面质点的振动位移,结果如下:
[0074][0075]
由式(16)可知,当激励相位差θ=θ1,行波沿着x负方向传播;当激励相位差θ=θ2,行波沿着x正方向传播。
[0076]
由式(15)和式(16)可知,行波在θ∈(0,π)和θ∈(π,2π)两个区间内传播方向相反,且在α∈(0,π)和α∈(π,2π)两个区间,相同激励相位差θ产生的声表面波中行波的传播方向也是相反的,微液滴4的方向控制原理总结如下:
[0077]
(1)当0<α<π时,调节0<θ<π,可以控制微液滴4沿着x轴正向传播;
[0078]
(2)当0<α<π时,调节π<θ<2π,可以控制微液滴4沿着x轴负向传播;
[0079]
(3)当π<α<2π时,调节0<θ<π,可以控制微液滴4沿着x轴负向传播;
[0080]
(4)当π<α<2π时,调节π<θ<2π,可以控制微液滴4沿着x轴正向传播。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。