1.本发明涉及园林机械,特别涉及一种园林水池打捞机器人。
背景技术:
2.在景区和小区的物业管理中,水池上的垃圾往往很难清理和打捞,常见的是通过人工打捞的方式来打捞杂物,但是工作效率较低,为了解决这一问题,申请号:201710958480.6公布了一种用于水池自动清理杂质的移动装置,该发明在一定程度上解决了水池杂物清理的问题,但是其工作方式较为单一,清理方法较为单一。
技术实现要素:
3.针对上述技术问题本发明提供了一种园林水池打捞机器人,包括漂浮装置、传动系统、收集装置、打捞装置,所述漂浮装置漂浮在水面上,传动系统固定安装在收集装置上,收集装置固定安装在漂浮装置上,打捞装置固定安装在漂浮装置上。
4.漂浮装置包括:大带轮、电机、皮带、小带轮、电机座、长轴、关节、连接体、导向杆、导向块、气囊、连接板、减震弹簧、顶板、边梁、底座,大带轮固定安装在长轴上,电机固定安装在电机座上,皮带转动缠绕安装在大带轮和小带轮上,小带轮固定安装在电机的输出端,电机座固定安装在长轴上,长轴固定安装在连接体上,关节固定安装在长轴上,连接体是漂浮装置的支撑体,导向杆转动安装在关节上,纵向杆固定安装在连接体上,导向块转动安装在导向杆上,气囊固定安装在纵向杆上,连接板固定安装在导向块上,减震弹簧固定安装在连接板上,顶板固定安装在四个减震弹簧上,边梁固定安装在顶板上,底座固定安装在两个边梁之间。
5.传动系统包括:传动电机、传动电机座、小齿轮、止动套、输入轴、大齿轮、输出轴、圆螺母、箱体、轴承、传动底座,传动电机固定安装在传动电机座上,传动电机座固定安装在传动底座上,小齿轮固定安装在输入轴上,止动套转动安装在输入轴上,输入轴转动安装在传动电机座上,大齿轮固定安装在输出轴上,输出轴转动安装在轴承上,圆螺母转动安装在输出轴上,箱体固定安装在传动底座上,轴承转动安装在箱体上,传动底座固定安装在浮板上。
6.收集装置包括:轴瓦、叶板、转轴、叶片、端梁、纵梁、侧板、收集板、浮板、立柱、收集箱、门型架、过滤网、吊板,轴瓦固定安装在侧板上,叶板固定安装在转轴上,转轴转动安装在轴瓦上,四个叶片固定安装在叶板上,端梁固定安装在两个纵梁之间,纵梁固定安装在侧板上,侧板固定安装在立柱上,收集板固定安装在侧板上,浮板固定安装在立柱上,收集箱固定安装在门型架上,门型架固定安装在纵梁上,过滤网固定安装在收集箱上,吊板固定安装在收集箱上。
7.打捞装置包括:打捞斗、端板、旋转轴、马达、轴套、连接臂、弹簧、旋转气缸、气缸座、腹板、沥水架、垃圾箱、弯板、挂钩,打捞斗固定安装在轴套上,端板固定安装在连接臂上,旋转轴转动安装在端板上,马达固定安装在端板上,轴套转动安装在旋转轴上,两个连
接臂动安装在腹板上,弹簧固定安装在连接臂上,旋转气缸固定安装在气缸座上,气缸座固定安装在腹板上,腹板固定安装在弯板上,沥水架固定安装在腹板上,垃圾箱固定安装在挂钩上,弯板固定安装在底座上,挂钩固定安装在弯板上。
8.进一步的,皮带与大带轮、小带轮通过带缠绕形成转动配合。
9.进一步的,导向杆与导向块通过轴孔形成转动配合。
10.进一步的,止动套与输入轴通过轴孔形成转动配合。
11.进一步的,小齿轮与大齿轮通过相互啮合形成转动配合。
12.进一步的,圆螺母与输出轴通过轴孔形成转动配合。
13.进一步的,转轴与轴瓦通过轴孔形成转动配合。
14.进一步的,旋转轴与轴套通过轴孔形成转动配合。
15.本发明与现有技术相比的有益效果是:(1)通过漂浮装置上的两个气囊为机器人提供足够的浮力,使得机器人在水面上平稳的运行;(2)通过传动系统和收集装置的相互配合驱动叶片进行转动,划动水面使得机器人进行水面上的移动;(3)通过打捞装置上的打捞斗来打捞水面上较大的杂物,自动化程度高,可控性强。
附图说明
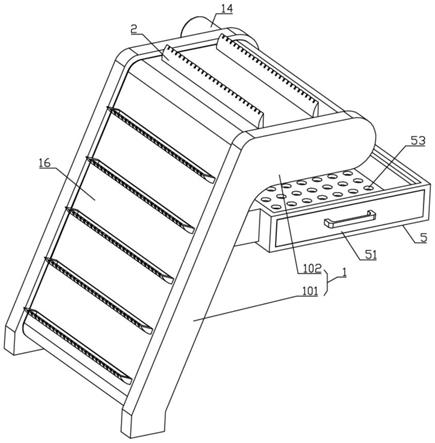
16.图1为本发明整体示意图。
17.图2为本发明漂浮装置示意图。
18.图3为本发明传动系统示意图。
19.图4为本发明收集装置示意图。
20.图5为本发明打捞装置示意图。
21.附图标号:1
‑
漂浮装置;2
‑
传动系统;3
‑
收集装置;4
‑
打捞装置;101
‑
大带轮;102
‑
电机;103
‑
皮带;104
‑
小带轮;105
‑
电机座;106
‑
长轴;107
‑
关节;108
‑
连接体;109
‑
导向杆;110
‑
纵向杆;111
‑
导向块;112
‑
气囊;113
‑
连接板;114
‑
减震弹簧;115
‑
顶板;116
‑
边梁;117
‑
底座;201
‑
传动电机;202
‑
传动电机座;203
‑
小齿轮;204
‑
止动套;205
‑
输入轴;206
‑
大齿轮;207
‑
输出轴;208
‑
圆螺母;209
‑
箱体;210
‑
轴承;211
‑
传动底座;301
‑
轴瓦;302
‑
叶板;303
‑
转轴;304
‑
叶片;305
‑
端梁;306
‑
纵梁;307
‑
侧板;308
‑
收集板;309
‑
浮板;310
‑
立柱;311
‑
收集箱;312
‑
门型架;313
‑
过滤网;314
‑
吊板;401
‑
打捞斗;402
‑
端板;403
‑
旋转轴;404
‑
马达;405
‑
轴套;406
‑
连接臂;407
‑
弹簧;408
‑
旋转气缸;409
‑
气缸座;410
‑
腹板;411
‑
沥水架;412
‑
垃圾箱;413
‑
弯板;414
‑
挂钩。
具体实施方式
22.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
23.实施例:如图1、图2、图3、图4、图5所述的一种园林水池打捞机器人,包括漂浮装置1、传动系统2、收集装置3、打捞装置4。
24.一种园林水池打捞机器人的具体结构如图1所示,其中漂浮装置1漂浮在水面上,传动系统2固定安装在收集装置3上,收集装置3固定安装在漂浮装置1上,打捞装置4固定安装在漂浮装置1上,漂浮装置1和收集装置3接触到水面,收集装置3推动机器人进行水面的
移动。
25.漂浮装置1的具体结构如图2所示,其中大带轮101固定安装在长轴106上,电机102固定安装在电机座105上,皮带103转动缠绕安装在大带轮101和小带轮104上,小带轮104固定安装在电机102的输出端,电机座105固定安装在长轴106上,长轴106固定安装在连接体108上,关节107固定安装在长轴106上,连接体108是漂浮装置1的支撑体,导向杆109转动安装在关节107上,纵向杆110固定安装在连接体108上,导向块111转动安装在导向杆109上,气囊112固定安装在纵向杆110上,连接板113固定安装在导向块111上,减震弹簧114固定安装在连接板113上,顶板115固定安装在四个减震弹簧114上,边梁116固定安装在顶板115上,底座117固定安装在两个边梁116之间,漂浮装置1上两个对称安装的气囊112为机器人提供了足够的浮力,其中皮带103传动带动连接板117进行收缩,调整了与收集装置3之间的距离。
26.传动系统2的具体结构如图3所示,其中传动电机201固定安装在传动电机座202上,传动电机座202固定安装在传动底座211上,小齿轮203固定安装在输入轴205上,止动套204转动安装在输入轴205上,输入轴205转动安装在传动电机座202上,大齿轮206固定安装在输出轴207上,输出轴207转动安装在轴承210上,圆螺母208转动安装在输出轴207上,箱体209固定安装在传动底座211上,轴承210转动安装在箱体209上,传动底座211固定安装在浮板309上,通过传动系统2上的传动电机201、小齿轮203和大齿轮206的相互啮合组成传动机构,从而为收集装置3提供动力。
27.收集装置3的具体结构如图4所示,其中轴瓦301固定安装在侧板307上,叶板302固定安装在转轴303上,转轴303转动安装在轴瓦301上,四个叶片304固定安装在叶板302上,端梁305固定安装在两个纵梁306之间,纵梁306固定安装在侧板307上,侧板307固定安装在立柱310上,收集板308固定安装在侧板307上,浮板309固定安装在立柱310上,收集箱311固定安装在门型架312上,门型架312固定安装在纵梁306上,过滤网313固定安装在收集箱311上,吊板314固定安装在收集箱311上,通过收集装置3上的转轴303带动叶片304进行翻转,使得机器人在水面上进行移动,收集箱311收集水面上较小的杂物。
28.打捞装置4的具体结构如图5所示,其中打捞斗401固定安装在轴套405上,端板402固定安装在连接臂406上,旋转轴403转动安装在端板402上,马达404固定安装在端板402上,轴套405转动安装在旋转轴403上,两个连接臂406动安装在腹板410上,弹簧407固定安装在连接臂406上,旋转气缸408固定安装在气缸座409上,气缸座409固定安装在腹板410上,腹板410固定安装在弯板413上,沥水架411固定安装在腹板410上,垃圾箱412固定安装在挂钩414上,弯板413固定安装在底座117上,挂钩414固定安装在弯板413上,通过打捞装置4上的马达404驱动打捞斗401清理水面上较大的杂物,旋转气缸408带动连接臂406进行转动,沥水架411用来沥干杂物上的水分,打捞的杂物放进垃圾箱412中。
29.使用本发明时,漂浮装置1和收集装置3接触到水面,收集装置3推动机器人进行水面的移动。漂浮装置1上两个对称安装的气囊112为机器人提供了足够的浮力,其中皮带103传动带动连接板117进行收缩,调整了与收集装置3之间的距离。通过传动系统2上的传动电机201、小齿轮203和大齿轮206的相互啮合组成传动机构,从而为收集装置3提供动力。通过收集装置3上的转轴303带动叶片304进行翻转,使得机器人在水面上进行移动,收集箱311收集水面上较小的杂物。通过打捞装置4上的马达404驱动打捞斗401清理水面上较大的杂
物,旋转气缸408带动连接臂406进行转动,沥水架411用来沥干杂物上的水分,打捞的杂物放进垃圾箱412中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。