技术特征:
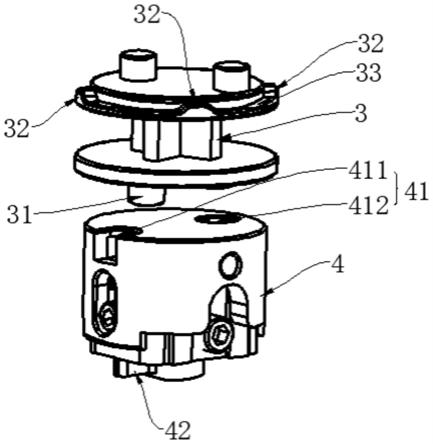
1.一种手术机器人器械的对接机构,其特征在于,包括转接板(1)、滑台(2)、过渡轮(3)、电机和电机座(4),所述电机安装于所述电机座(4)上,所述电机座(4)设置在所述滑台(2)上,所述过渡轮(3)设置在所述转接板(1)上;所述过渡轮(3)的一端与所述电机座(4)的一端连接,所述电机与所述电机座(4)的另一端连接,且所述过渡轮(3)上设有第一连接部(31),所述电机座(4)上设有第二连接部(41),所述电机用于驱动所述电机座(4)旋转以使所述第一连接部(31)与所述第二连接部(41)插接配合。2.根据权利要求1所述的手术机器人器械的对接机构,其特征在于,所述第一连接部(31)和所述第二连接部(41)中的一者为凸起结构,另一者为凹槽结构。3.根据权利要求2所述的手术机器人器械的对接机构,其特征在于,所述凹槽结构包括第一凹槽(411)和第二凹槽(412),所述凸起结构包括第一柱体和第二柱体,所述第一凹槽(411)和所述第二凹槽(412)分别与所述第一柱体和所述第二柱体插接,且所述第一凹槽(411)和所述第二凹槽(412)分别为豁口结构和腰形槽结构中的一种。4.根据权利要求1所述的手术机器人器械的对接机构,其特征在于,所述滑台(2)上设有电机接口(21),所述电机座(4)设置在所述电机接口(21)内,所述电机接口(21)内设有第一限位结构(22),所述电机座(4)远离于所述过渡轮(3)的一端设有第二限位结构(42),且所述第一限位结构(22)与所述第二限位结构(42)适于在相接触时触发所述电机换向旋转。5.根据权利要求4所述的手术机器人器械的对接机构,其特征在于,所述第一限位结构(22)和/或所述第二限位结构(42)为限位触点。6.根据权利要求1所述的手术机器人器械的对接机构,其特征在于,所述转接板(1)上设有过渡轮接口(11),所述过渡轮(3)设置在所述过渡轮接口(11)内,并适于在所述过渡轮接口(11)内沿所述过渡轮(3)的轴线方向移动和绕所述过渡轮(3)的轴线方向转动。7.根据权利要求6所述的手术机器人器械的对接机构,其特征在于,所述过渡轮(3)远离于所述电机座(4)的一端设有第一凸起(32),所述过渡轮接口(11)内与所述第一凸起(32)相对应的位置处设有第二凸起(12),所述第一凸起(32)与所述第二凸起(12)相对设置且具有间距;所述第一凸起(32)上设有第一弧面,所述第二凸起(12)上设有第二弧面,且所述第一凸起(32)和所述第二凸起(12)在所述第一弧面与所述第二弧面相碰撞时形成错位。8.根据权利要求7所述的手术机器人器械的对接机构,其特征在于,所述过渡轮(3)远离于所述电机座(4)的一端设有第一防脱凸台(33),所述过渡轮接口(11)内设有第二防脱凸台(13),所述第一凸起(32)设置在所述第一防脱凸台(33)上,所述第二凸起(12)设置在所述第二防脱凸台(13)上,所述第一防脱凸台(33)位于所述过渡轮接口(11)内,且所述第一防脱凸台(33)的外径大于所述第二防脱凸台(13)的内径。9.根据权利要求7所述的手术机器人器械的对接机构,其特征在于,所述第一凸起(32)设置有多个,且多个所述第一凸起(32)围绕所述过渡轮(3)的轴线均匀分布。10.一种手术机器人器械的对接方法,基于如权利要求1至9任一项所述的手术机器人器械的对接机构,其特征在于,包括以下步骤:控制电机按预设运动方式带动电机座(4)旋转;当滑台(2)上的第一限位结构(22)与所述电机座(4)上的第二限位结构(42)发生第一次碰撞时,所述电机带动所述电机座(4)反向旋转,当所述第一限位结构(22)与所述第二限位结构(42)发生第二次碰撞后,所述电机带动所述电机座(4)运动至零位位置停止;
在所述电机座(4)全范围旋转过程中,所述电机座(4)上的第二连接部(41)寻找过渡轮(3)上的第一连接部(31)并与之形成插接后,所述电机座(4)带动所述过渡轮(3)一起转动至所述零位位置。
技术总结
本发明提供了一种手术机器人器械的对接机构及对接方法,所述对接机构包括转接板、滑台、过渡轮、电机和电机座,所述电机安装于所述电机座上,所述电机座设置在所述滑台上,所述过渡轮设置在所述转接板上;所述过渡轮的一端与所述电机座的一端连接,所述电机与所述电机座的另一端连接,且所述过渡轮上设有第一连接部,所述电机座上设有第二连接部,所述电机用于驱动所述电机座旋转以使所述第一连接部与所述第二连接部插接配合。本发明通过电机驱动电机座旋转以寻找与过渡轮进行对接的位置,实现了电机座与过渡轮之间的自动对接,避免了手动对接时的繁琐,而且有效地提高了过渡轮与滑台的对接效率。台的对接效率。台的对接效率。
技术研发人员:庞海峰 马登辉 王晓伟
受保护的技术使用者:苏州康多机器人有限公司
技术研发日:2021.08.25
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。