1.本实用新型公开了一种全自动智能喷漆装置,属于手动工具技术领域。
背景技术:
2.车辆生产装配过程中,点漆标识是对拧紧力矩结果和线束、管路插接状态确认的基本操作。作为一项辅助操作内容,点漆占据总装生产近8%的工时。此外,由于涉及位置较多、空间复杂、可操作区域小、状态一致性差等问题,对视觉定位精度及柔性化方面有较高要求,行业内点漆操作均为人工手动完成,目前尚无自动化的解决方案。
技术实现要素:
3.本实用新型的目的在于解决手动点漆标记遗漏、模糊、断点等问题,提供一种全自动智能喷漆装置,代替人工完成装配质量确认工作并实现标识画线的标准化,提高总装自动化率,保证总装生产的装配质量。
4.本实用新型所要解决的问题是由以下技术方案实现的:
5.一种全自动智能喷漆装置,包括:六轴机器人、第七轴移动总成、视觉设备和喷漆设备,所述六轴机器人设置在第七轴移动总成上,所述六轴机器人端部设置有u型架,所述视觉设备设置在u型架的一端上,所述喷漆设备设置在u型架的另一端上。
6.优选的是,所述第七轴移动总成包括:电机、底座、驱动板、支撑板、旋转轴和支撑架,所述支撑板、电机设置在支撑架上,所述旋转轴两端旋转安装在支撑板两端,所述旋转轴一端与电机的主轴同轴,驱动板套设在旋转轴上,所述旋转轴转动能带动驱动板在支撑板上滑动,所述底座固定在驱动板上,所述六轴机器人固定在底座上。
7.优选的是,还包括供漆系统,其设置在第七轴移动总成远离电机的一侧,所述供漆系统与喷漆设备通过软管连接。
8.优选的是,还包括机器人控制器和机器人示教器,所述机器人示教器设置在机器人控制器顶部并通过电性连接在一起,所述机器人控制器与供漆系统相邻。
9.优选的是,所述电机采用步进电机。
10.优选的是,所述供漆系统、机器人控制器、机器人示教器、电机和六轴机器人电连接。
11.本实用新型相对于现有而言具有的有益效果:
12.本实用新型提出一种全自动智能喷漆装置,解决人工点漆过程中标记遗漏、模糊、断点等问题,保证车辆装配质量;通过编程即可满足不同车型,不同位置的质量确认工作;减少人员作业内容,降低工作负荷,提高装配自动化率。
附图说明
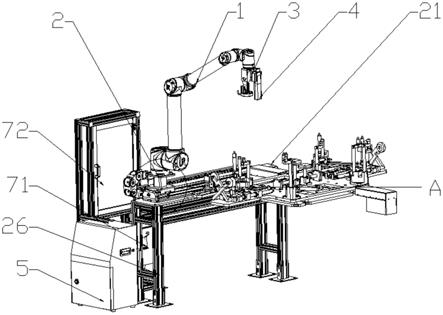
13.图1是本实用新型的整体结构示意图。
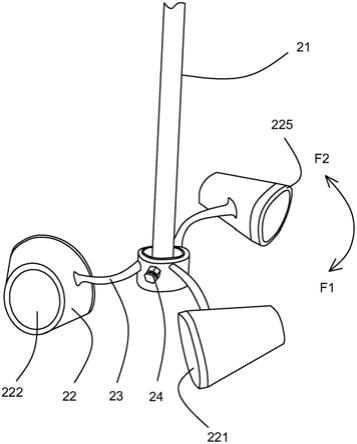
14.图2是本实用新型的部分结构示意图。
15.图3是本实用新型的a处放大图。
具体实施方式
16.以下根据附图1
‑
3对本实用新型做进一步说明:
17.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
19.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
20.如图1、2所示,本实用新型第一实施例在现有技术的基础上提供了本实用新型的提供一种全自动智能喷漆装置,包括:六轴机器人1、第七轴移动总成2、视觉设备3、机器人控制器71、机器人示教器72、供漆系统5和喷漆设备4,接下里将逐一描述上述提到的各个组件的结构和连接方式。
21.六轴机器人1安装在第七轴移动总成2上,六轴机器人1端部安装有u型架11,视觉设备3安装在u型架11的一端上,喷漆设备4安装在u型架11的另一端上。
22.如图2所示,第七轴移动总成2包括:电机21、底座22、驱动板3、支撑板24、旋转轴25和支撑架26,支撑板24、电机21通过螺栓固定在在支撑架26上,旋转轴25两端旋转安装在支撑板24两端上,旋转轴25一端与电机21的主轴通过联轴器连接在一起,驱动板23套设在旋转轴25上,旋转轴25转动能带动驱动板23在支撑板24上滑动,底座22通过螺栓固定在驱动板23上,六轴机器人2通过螺栓固定在底座22上,电机21采用步进电机。
23.供漆系统5放置在第七轴移动总成2远离电机21的一侧,供漆系统5与喷漆设备4通过软管连接。机器人示教器72安装在机器人控制器71顶部并通过电性连接在一起,所述机器人控制器71与供漆系统5相邻,供漆系统5、机器人控制器71、机器人示教器72、电机21和六轴机器人1电连接。
24.具体工作方式:
25.通过市政供电,电机21主轴转动带动驱动板23在支撑板24上滑动,从而带动六轴机器人1移动,六轴机器人1带动视觉设备3和喷漆设备4移动到指定为然后进行喷漆。
26.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
技术特征:
1.一种全自动智能喷漆装置,其特征在于,包括:六轴机器人(1)、第七轴移动总成(2)、视觉设备(3)和喷漆设备(4),所述六轴机器人(1)设置在第七轴移动总成(2)上,所述六轴机器人(1)端部设置有u型架(11),所述视觉设备(3)设置在u型架(11)的一端上,所述喷漆设备(4)设置在u型架(11)的另一端上。2.根据权利要求1所述的一种全自动智能喷漆装置,其特征在于,所述第七轴移动总成(2)包括:电机(21)、底座(22)、驱动板(23)、支撑板(24)、旋转轴(25)和支撑架(26),所述支撑板(24)、电机(21)设置在支撑架(26)上,所述旋转轴(25)两端旋转安装在支撑板(24)两端上,所述旋转轴(25)一端与电机(21)的主轴同轴,驱动板(23)套设在旋转轴(25)上,所述旋转轴(25)转动能带动驱动板(23)在支撑板(24)上滑动,所述底座(22)固定在驱动板(23)上,所述六轴机器人(1)固定在底座(22)上。3.根据权利要求2所述的一种全自动智能喷漆装置,其特征在于,还包括供漆系统(5),其设置在第七轴移动总成(2)远离电机(21)的一侧,所述供漆系统(5)与喷漆设备(4)通过软管连接。4.根据权利要求3所述的一种全自动智能喷漆装置,其特征在于,还包括:机器人控制器(71)和机器人示教器(72),所述机器人示教器(72)设置在机器人控制器(71)顶部并通过电性连接在一起,所述机器人控制器(71)与供漆系统(5)相邻。5.根据权利要求4所述的一种全自动智能喷漆装置,其特征在于,所述电机(21)采用步进电机。6.根据权利要求5所述的一种全自动智能喷漆装置,其特征在于,所述供漆系统(5)、机器人控制器(71)、机器人示教器(72)、电机(21)和六轴机器人(1)电连接。
技术总结
本实用新型公开了一种全自动智能喷漆装置,属于喷漆设备技术领域,包括:六轴机器人、第七轴移动总成、视觉设备和喷漆设备,所述六轴机器人设置在第七轴移动总成上,所述六轴机器人端部设置有U型架,所述视觉设备设置在U型架的一端上,所述喷漆设备设置在U型架的另一端上。本实用新型提出一种全自动智能喷漆装置,解决人工点漆过程中标记遗漏、模糊、断点等问题,保证车辆装配质量;通过编程即可满足不同车型,不同位置的质量确认工作;减少人员作业内容,降低工作负荷,提高装配自动化率。提高装配自动化率。提高装配自动化率。
技术研发人员:褚泰华 宋伟佳 冯联会 陈思捷 鲁鹏 何强 刘吉 郑成禹
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:2020.12.29
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。