1.一种清洁机器人,用于清洁底板或物体表面的灰尘及杂质,属于清洁设备制造技术领域。
背景技术:
2.现有的清洁机器人内部设有一个集尘箱,在吸取灰尘或杂物的过程中,灰尘或杂物通过吸尘通道进入到集尘箱内,当集尘箱内的杂物集满到一定的程度之后,便将机器人拆开,然后将集尘箱内的灰尘以及杂物倒掉,便于下一次的使用,但是,在倒掉集尘箱内的灰尘以及杂物的过程中,无可避免地需要用手去接触集尘箱,而集尘箱内装的全是垃圾,诸如瓜子壳、头发、头皮屑、指甲、灰尘、茶叶、人体身上的死皮等等,这些垃圾混合在一起会产生细菌,并且,并不是每一次吸尘之后都会对集尘箱进行清洁,从而使得集尘箱内的垃圾滞留,使得细菌的滋生更加严重。
技术实现要素:
3.本发明的目的是针对现有技术的缺点,采用在清洁机器人内放置集尘箱的空腔内设置若干紫外线灯管配合透明的集尘箱的方式,设计了一种能够在集尘箱积压滞留垃圾的过程中对集尘箱以及集尘箱内的垃圾进行紫外线消毒的清洁机器人,解决了现有的清洁机器人的内部由于集尘箱内挤压滞留垃圾,导致细菌滋生的问题。
4.为解决以上技术问题,本发明采用的技术方案如下:
5.一种清洁机器人,包括吸尘部和由不透光材质制作的储尘部,所述吸尘部内设有向上的灰尘通道a,所述吸尘部内在所述灰尘通道a的下端设有吸尘腔,所述吸尘腔内水平设有轴线与所述灰尘通道a的轴线垂直的吸尘辊,所述吸尘腔的内设有驱动装置,所述驱动装置传动连接所述吸尘辊,所述储尘部的下部连接所述吸尘部的上部,所述储尘部内设有集尘空腔,所述集尘空腔的侧壁通过灰尘通道b与所述灰尘通道a连通,所述集尘空腔的上部设有负压装置,所述集尘空腔的底壁和侧壁上均布满紫外线灯管,所述集尘空腔内在紫外线灯管下方安装透明且开口向上的集尘箱,所述集尘箱的开口处安装有滤网盖,所述滤网盖上设有管孔,输送软管的一端通过所述管孔伸入集尘箱内,另一端与所述灰尘通道b远离灰尘通道a的一端连通。
6.在本发明中,使用时,先在集尘箱内加水,同时,将输送软管的一端伸入到集尘箱内的水面以下,然后将清洁机器人对准地板上(或桌子上或其他具有污渍等需要清理的地方)需要清理的地方,然后打开清洁机器人的开关,推动清洁机器人经过污渍(或灰尘)处,此时,由于清洁机器人的吸尘部内的吸尘腔中设置的吸尘辊在驱动装置的带动下转动,将灰尘等垃圾搅动,使得灰尘或垃圾离开支撑灰尘或垃圾的支撑处(支撑处也就是地板或桌面等),同时,在负压装置的作用下,被搅动的灰尘或垃圾在负压作用下依次经过灰尘通道b、灰尘通道a最后到达集尘箱内,由于在集尘箱内装水,使得在使用过程中负压装置吸气时,灰尘等垃圾进入集尘箱的过程中经过水,能够避免灰尘在集尘箱内逃逸,而集尘空腔的
底壁和侧壁上均布满紫外线灯管,使得紫外线灯管发出的紫外线光能够从集尘箱的四周对集尘箱进行照射,并且集尘箱是透明的,从而使得对集尘箱以及集尘箱内盛装的垃圾物品的消毒更加彻底,而制作的储尘部的材质为不透光材质,使得紫外线不会照射到清洁机器人外,从而避免紫外线对使用者的伤害,当然了,优选的,可以连吸尘部也采用不透光材质制作。
7.作为一种优选的方式,所述集尘腔的一个侧壁为开关门,所述开关门与所述集尘空腔的接触处设有气囊密封装置,所述集尘空腔内设有气压传感器,所述输送软管上设有电磁开关阀,所述集尘空腔内位于所述集尘箱的上方设有气泵,所述气泵的输出端通过电磁换向阀分别连接所述气囊密封装置和所述集尘空腔,所述气压传感器电性连接控制器的输入端,所述控制器的输出端电性连接所述电磁开关阀和紫外线灯管的控制开关,所述气泵与负压装置电性串联,在所述气泵与所述负压装置之间通过单刀双置开关电性连接,所述开关门上设有电源总开关。
8.作为一种优选的方式,所述单刀双置开关设于所述储尘部的表面。
9.作为一种优选的方式,所述吸尘辊的下端超出所述吸尘部的下表面1厘米,所述吸尘部的下表面上在所述吸尘腔上平行于所述吸尘辊的开口边沿上设有挡尘板,所述挡尘板远离所述吸尘辊的一侧在吸尘部的下表面上设有滚轮,所述挡尘板的厚度为1厘米。
10.作为一种优选的方式,所述储尘部内在所述集尘空腔的下方设有储水腔,所述储水腔内设有水泵,所述水泵的输出端连通所述吸尘腔。
11.作为一种优选的方式,所述气囊密封装置为沿着所述开关门的门沿上设置的一圈气囊。
12.作为一种优选的方式,所述集尘空腔内在所述集尘箱与所述负压装置之间还排列设有若干紫外线灯管。
13.与现有技术相比,本发明的有益效果是:
14.(1)本发明采用在清洁机器人内放置集尘箱的空腔内设置若干紫外线灯管配合透明的集尘箱的方式,设计了一种能够在集尘箱积压滞留垃圾的过程中对集尘箱以及集尘箱内的垃圾进行紫外线消毒的清洁机器人,解决了现有的清洁机器人的内部由于集尘箱内挤压滞留垃圾,导致细菌滋生的问题。
15.(2)本发明通过在开关门上设置电源总开关,使得在需要将集尘箱从集尘空腔内取出倒垃圾时,可以通过电源总开关将整个清洁机器人的电源关闭,然后再打开开关门,从而防止紫外线灯管发生忘记关闭的情况使得紫外线射出,伤害到操作者,由于操作者在需要将集尘箱从集尘空腔内取出前,必须先打开开关门,因此将电源总开关设置在开关门上,会更好地提醒到操作者。
16.(3)本发明设置气囊密封装置之后,便有效地避免了紫外线灯管发出的紫外线从开关门与集尘腔的配合的空隙中射出清洁机器人外而伤害到使用者。
17.(4)本发明通过储水腔的设置,使得在遇到地板上的污渍时,可以通过控制水泵打开,将储水腔内的水放出来,使得地板上的污渍处溶于储水腔内放出的水,然后在吸尘辊的搅动下,将地板清洗干净,吸尘辊3的圆周面上可以设置一些布匹或海绵,这样清洗效果更好。
附图说明
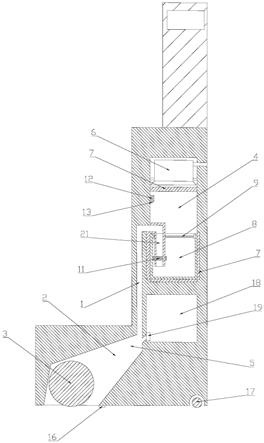
18.图1为本发明的剖面图;
19.图2为本发明的控制逻辑图;
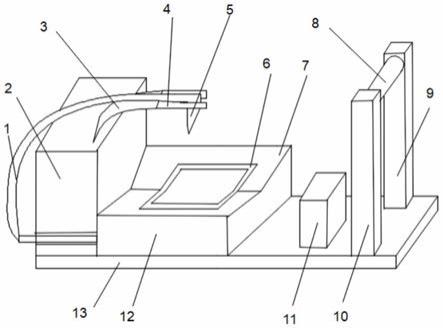
20.图3为本发明的外部结构示意图。
21.其中,1、灰尘通道a;2、吸尘腔a;3、吸尘辊;4、集尘空腔;5、灰尘通道b;6、负压装置;7、紫外线灯管;8、集尘箱;9、滤网盖;10、开关门;11、电磁开关阀;12、气泵;13、电磁换向阀;14、电源总开关;15、单刀双置开关;16、挡尘板;17、滚轮;18、储水腔;19、水泵;20、气囊;21、输送软管。
具体实施方式
22.如图1
‑
3所示,一种清洁机器人,包括吸尘部和由不透光材质制作的储尘部,所述吸尘部内设有向上的灰尘通道a1,所述吸尘部内在所述灰尘通道a1的下端设有吸尘腔2,所述吸尘腔2内水平设有轴线与所述灰尘通道a1的轴线垂直的吸尘辊3,所述吸尘腔2的内设有驱动装置,所述驱动装置传动连接所述吸尘辊3,所述储尘部的下部连接所述吸尘部的上部,所述储尘部内设有集尘空腔4,所述集尘空腔4的侧壁通过灰尘通道b5与所述灰尘通道a1连通,所述集尘空腔4的上部设有负压装置,所述集尘空腔4的底壁和侧壁上均布满紫外线灯管7,所述集尘空腔4内在紫外线灯管7下方安装透明且开口向上的集尘箱8,所述集尘箱8的开口处安装有滤网盖9,所述滤网盖9上设有管孔,输送软管21的一端通过所述管孔伸入集尘箱8内,另一端与所述灰尘通道b5远离灰尘通道a1的一端连通。
23.使用时,先在集尘箱8内加水,同时,将输送软管21的一端伸入到集尘箱8内的水面以下,然后将清洁机器人对准地板上(或桌子上或其他具有污渍等需要清理的地方)需要清理的地方,然后打开清洁机器人的开关,推动清洁机器人经过污渍(或灰尘)处,此时,由于清洁机器人的吸尘部内的吸尘腔中设置的吸尘辊3在驱动装置的带动下转动,将灰尘等垃圾搅动,使得灰尘或垃圾离开支撑灰尘或垃圾的支撑处(支撑处也就是地板或桌面等),同时,在负压装置的作用下,被搅动的灰尘或垃圾在负压作用下依次经过灰尘通道b5、灰尘通道a1最后到达集尘箱8内,由于在集尘箱8内装水,使得在使用过程中负压装置吸气时,灰尘等垃圾进入集尘箱8的过程中经过水,能够避免灰尘在集尘箱8内逃逸,而集尘空腔4的底壁和侧壁上均布满紫外线灯管7,使得紫外线灯管7发出的紫外线光能够从集尘箱8的四周对集尘箱8进行照射,并且集尘箱8是透明的,从而使得对集尘箱8以及集尘箱8内盛装的垃圾物品的消毒更加彻底,而制作的储尘部的材质为不透光材质,使得紫外线不会照射到清洁机器人外,从而避免紫外线对使用者的伤害,当然了,优选的,可以连吸尘部也采用不透光材质制作;驱动装置可以采用马达,马达驱动辊子是现有技术,例如将辊子与马达(电动机)的输出轴同轴连接即可。
24.优选的,所述集尘腔4的一个侧壁为开关门10,用于打开或者关闭集尘腔4,从而方便放置集尘箱8,但是,在使用过程中,由于使用紫外线灯管7发射紫外线对集尘腔内部进行消毒,为防止紫外线灯管7发射的紫外线从开关门10与集尘腔4的配合的空隙(俗称门缝)中射出清洁机器人外,如图3所示,在所述开关门10与所述集尘空腔4的接触处设置气囊密封装置,同时在集尘空腔4内设置气压传感器,在输送软管21上设置电磁开关阀11,所述集尘空腔4内位于所述集尘箱8的上方设有气泵12,如图2所示,所述气泵12的输出端通过电磁换
向阀13分别连接所述气囊密封装置和所述集尘空腔4,所述气压传感器电性连接控制器的输入端,所述控制器的输出端电性连接所述电磁开关阀11、紫外线灯管7的控制开关、气泵12的控制开关、电磁换向阀13,所述控制器与负压装置电性串联,在所述控制器与所述负压装置之间通过单刀双置开关15电性连接,所述开关门10上设有电源总开关14。从而使得在使用时,将单刀双置开关15按压到接通负压装置处(负压装置可以使用普通的抽风机,在抽风机的进风口或出风口处设置一个开关装置,使得在未工作装置时,封闭进风口或出风口,现有技术而已,在此不多作赘述),从而按照前述的操作进行吸尘操作,在吸尘操作结束后,将单刀双置开关15按压到接通控制器一端,此时便将负压装置的电路断开,从而负压装置不再工作,控制器将信号传递给电磁换向阀13、气泵12的控制开关,使得电磁换向阀13处于接通气囊密封装置的状态,同时气泵12向气囊内充气,待充气几秒后(可以通过控制器设置充气时间和电磁换向阀13的换向时间),控制器向电磁换向阀13传递信号,使电磁换向阀13换到连通集尘空腔4内的状态,同时,控制器将信号传递给电磁开关阀11,使得电磁开关阀11关闭,此时,气泵12便向集尘空腔4内充气,待充气到一定时间之后(充气时间可由控制器设置)停止充气,在这个过程中,气压传感器将集尘空腔4内的气压状况传递到控制器,控制器在气泵12停止充气后接收到的气压没有发生变化时,控制器将信号传递给紫外线灯管7的控制开关,使得紫外线灯管7打开对集尘空腔4内进行照射消毒,这样通过气囊密封装置的设置之后,便有效地避免了紫外线灯管7发出的紫外线从开关门10与集尘腔4的配合的空隙中射出清洁机器人外而伤害到使用者,当然了,负压装置采用在未工作状态时,内部具有气密性,不会发生气流穿过的抽风机,具体地,就是可以采用普通的抽风机,在抽风机的进风口或出风口处设置一个开关装置,使得在未工作装置时,封闭进风口或出风口,例如说采用开关阀等标准件;而在开关门10上设有电源总开关14,这样设置,使得在需要将集尘箱8从集尘空腔4内取出倒垃圾时,可以通过电源总开关14将整个清洁机器人的电源关闭,然后再打开开关门10,从而防止紫外线灯管7发生忘记关闭的情况使得紫外线射出,伤害到操作者,由于操作者在需要将集尘箱8从集尘空腔4内取出前,必须先打开开关门10,因此将电源总开关14设置在开关门10上,会更好地提醒到操作者,优选的,也可以通过一系列的其他设置(此处仅给出一个提示,不作具体详细方案介绍),使得必须先关闭电源总开关14才能打开开关门10。
25.优选地,将所述单刀双置开关15设置在所述储尘部的表面,从而方便操作者使用,例如说设置在储尘部的外顶壁,则可以使得操作者不用弯腰就可以操作,十分人性化。
26.优选地,由于灰尘、毛发等垃圾的厚度均小于1厘米,因此将所述吸尘辊3的下端设置为超出所述吸尘部的下表面1厘米,使得在地板与吸尘部的下表面之间能够容纳灰尘、毛发等垃圾,从而方便将灰尘、毛发等垃圾吸入到清洁机器人内,所述吸尘部的下表面上在所述吸尘腔2上平行于所述吸尘辊3的开口边沿上设有挡尘板16,所述挡尘板16远离所述吸尘辊3的一侧在吸尘部的下表面上设有滚轮17,所述挡尘板16的厚度为1厘米。这样设计之后,通过驱动装置使吸尘辊3转动,将地板上的灰尘等垃圾搅动,由于垃圾在被搅动后会存在离心现象,因此设置挡尘板16,防止在吸尘辊3的转动下灰尘乱飞,同时与负压装置配合,使得灰尘等垃圾顺利通过灰尘通道b5和灰尘通道a1进入到集尘箱8内,滚轮17的设置是为了使用者在使用时,能够通过滚轮17从而推动清洁机器人移动。
27.优选但不强求地,所述储尘部内在所述集尘空腔4的下方设有储水腔18,所述储水
腔18内设有水泵19,所述水泵19的输出端连通所述吸尘腔2,这样设置之后,在遇到地板上的污渍时,可以通过控制水泵19打开,将储水腔18内的水放出来,使得地板上的污渍处溶于储水腔18内放出的水,然后在吸尘辊3的搅动下,将地板清洗干净,吸尘辊3的圆周面上可以设置一些布匹或海绵,这样清洗效果更好,附图中仅是示意图,切不可抬杠说怎样将水加入到储水腔18内和怎样控制水泵19打开和关闭,储水腔18内注入水可以采用在储水腔18的上部侧壁开设一个贯穿储尘部外的注水口,而水泵19的控制可以采用电线将水泵19的控制开关接出到储水腔18外。
28.优选地,所述气囊密封装置为沿着所述开关门10的门沿上设置的一圈气囊20。
29.优选地,所述集尘空腔4内在所述集尘箱8与所述负压装置之间还排列设有若干紫外线灯管7,这样设置可以使得紫外线灯管7对滤网盖9的上表面进行消毒。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。