1.本实用新型涉及机器人设备技术领域,更具体的说是一种人形机器人手臂。
背景技术:
2.专利号为cn202021009970.5公开的一种医用内视镜扶持机器手臂公开的,该实用新型公开了一种医用内视镜扶持机器手臂,包括底座、主控台、主杆、摆动杆、连接杆、回转臂、电机组件、转轴、机器手臂、套块、夹持部件、悬臂以及轮子,底座顶部设置有主控台,主杆设置于底座上,摆动杆设置于主杆顶端,连接杆一端设置于主杆上,连接杆另一端设置于摆动杆上,回转臂设置于连接杆右端,电机组件电性连接于回转臂一侧,转轴设置于回转臂顶端,机器手臂设置于转轴上,套块设置于机器手臂上,夹持部件设置于机器手臂上,悬臂设置于机器手臂上,轮子设置于底座底部。本实用新型具有内视镜分段夹持的功能,可以增大夹持部位结构与内视镜之间的摩擦力,使夹持动作更加稳固,提高稳定性与效率,但是该实用新型无法实现机械手臂可以拆分,无法简单的更换夹持用具。
技术实现要素:
3.本实用新型提供一种人形机器人手臂,其有益效果为可以实现机械手臂可以拆分,可以简单的更换夹持用具。
4.本实用新型涉及机器人设备技术领域,更具体的说是一种人形机器人手臂,包括夹持装置、驱动装置、转动固定装置和移动装置,其特征在于:所述的驱动装置连接在夹持装置上,夹持装置连接在转动固定装置上,转动固定装置连接在移动装置上。
5.作为本技术方案的进一步优化,本实用新型一种人形机器人手臂所述的夹持装置包括连接圆柱、定位壳、滑动夹板和第一连接柱,定位壳固定连接在连接圆柱左端,两个滑动夹板均滑动连接在定位壳内,两个第一连接柱分别固定连接在两个滑动夹板上,连接圆柱右侧设有一端锥面。
6.作为本技术方案的进一步优化,本实用新型一种人形机器人手臂所述的驱动装置包括连接架、第一电机、齿轮、齿条和限位滑槽,两个滑槽分别固定连接在连接架下部前后两端,第一电机固定连接在连接架左端上部,齿轮固定连接在第一电机的输出轴上,两个齿条分别滑动连接在两个滑槽内,两个齿条均与齿轮啮合,连接架下端固定连接在定位壳上端中部。
7.作为本技术方案的进一步优化,本实用新型一种人形机器人手臂所述的转动固定装置包括第二电机、连接圆筒、固定架、夹持圆环、第一气缸和夹持体,连接圆筒固定连接在第二电机的输出轴上,两个固定架分别固定连接在连接圆筒上下两端,夹持圆环固定连接在两个固定架左端,多个第一气缸均固定连接在夹持圆环内部,多个夹持体分别固定连接在多个第一气缸内,连接圆柱左端位于连接圆筒内,多个夹持体位于连接圆柱右侧设的锥面处。
8.作为本技术方案的进一步优化,本实用新型一种人形机器人手臂所述的移动装置
包括第二连接柱、滑块、丝杠架、第三电机和丝杠,滑块左端滑动连接在第二连接柱上,丝杠架固定连接在第二连接柱右侧,第三电机固定连接在丝杠架内部上顿,丝杠上端固定连接在第三电机上,丝杠下端转动连接在丝杠架下端,滑块右端螺纹连接在丝杠上,第二电机固定连接在滑块左端。
9.本实用一种人形机器人手臂的有益效果为:
10.本实用一种人形机器人手臂,其有益效果为可以实现机械手臂可以拆分,可以简单的更换夹持用具,在需要维修的时候,可以将装置进行拆分,方便维修和保养,夹持部分方法简单,不易出现工作失误的情况。
附图说明
11.下面结合附图和具体实施方法对本实用新型做进一步详细的说明。
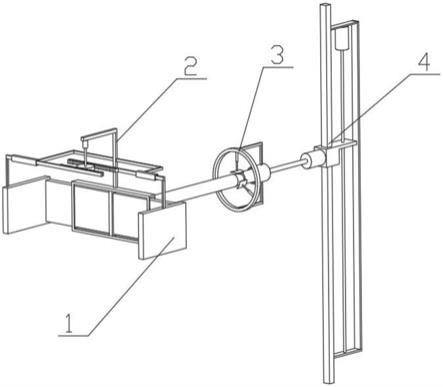
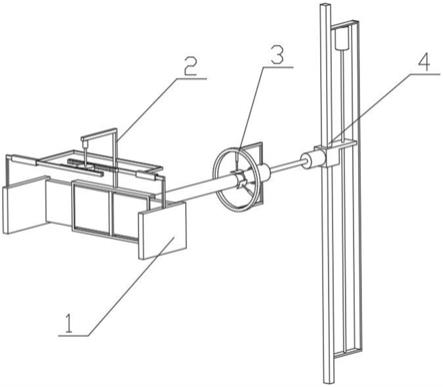
12.图1为本实用新型一种人形机器人手臂的结构示意图。
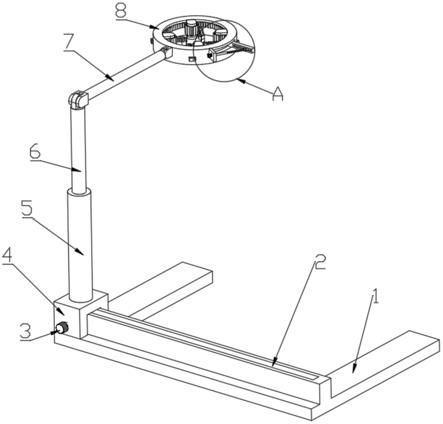
13.图2为一种人形机器人手臂另一方向的结构示意图。
14.图3为夹持装置的结构示意图。
15.图4为驱动装置的结构示意图。
16.图5为转动固定装置的结构示意图。
17.图6为移动装置的结构示意图。
18.图中:夹持装置1;连接圆柱1
‑
1;定位壳1
‑
2;滑动夹板1
‑
3;第一连接柱1
‑
4;驱动装置2;连接架2
‑
1;第一电机2
‑
2;齿轮2
‑
3;齿条2
‑
4;限位滑槽2
‑
5;转动固定装置3;第二电机3
‑
1;连接圆筒3
‑
2;固定架3
‑
3;夹持圆环3
‑
4;第一气缸3
‑
5;夹持体3
‑
6;移动装置4;连接柱4
‑
1;滑块4
‑
2;丝杠架4
‑
3;第三电机4
‑
4;丝杠4
‑
5。
具体实施方式
19.具体实施方式一:
20.下面结合图1、2、3、4、5说明本实施方式,本实用新型涉及防护设备技术领域,更具体的说是一种人形机器人手臂,包括夹持装置1、驱动装置2、转动固定装置3和移动装置4,其特征在于:所述的驱动装置2连接在夹持装置1上,夹持装置1连接在转动固定装置3上,转动固定装置3连接在移动装置4上,可以实现机械手臂可以拆分,可以简单的更换夹持用具,在需要维修的时候,可以将装置进行拆分,方便维修和保养,夹持部分方法简单,不易出现工作失误的情况。
21.具体实施方式二:
22.下面结合图1、2、3、4、5说明本实施方式,本实施方式对实施方式一作进一步说明,所述的夹持装置1包括连接圆柱1
‑
1、定位壳1
‑
2、滑动夹板1
‑
3和第一连接柱1
‑
4,定位壳1
‑
2固定连接在连接圆柱1
‑
1左端,两个滑动夹板1
‑
3均滑动连接在定位壳1
‑
2内,两个第一连接柱1
‑
4分别固定连接在两个滑动夹板1
‑
3上,连接圆柱1
‑
1右侧设有一端锥面,两个第一连接柱1
‑
4在驱动装置2的驱动下相互靠近或远离带动两个滑动夹板1
‑
3相互靠近或远离,到达夹持和放置物体的目的,连接圆柱1
‑
1在转动固定装置3和移动装置4的作用下达到旋转和上下移动的效果,可以将物体以不同的姿态放在不同的高度上。
23.具体实施方式三:
24.下面结合图1、2、3、4、5说明本实施方式,本实施方式对实施方式一作进一步说明,所述的驱动装置2包括连接架2
‑
1、第一电机2
‑
2、齿轮2
‑
3、齿条2
‑
4和限位滑槽2
‑
5,两个滑槽2
‑
5分别固定连接在连接架2
‑
1下部前后两端,第一电机2
‑
2固定连接在连接架2
‑
1左端上部,齿轮2
‑
3固定连接在第一电机2
‑
2的输出轴上,两个齿条2
‑
4分别滑动连接在两个滑槽2
‑
5内,两个齿条2
‑
4均与齿轮2
‑
3啮合,连接架2
‑
1下端固定连接在定位壳1
‑
2上端中部,第一电机2
‑
2转动带动齿轮2
‑
3转动,齿轮2
‑
3转动带动两个齿条2
‑
4在两个滑槽2
‑
5以相反的方向前后移动,两个齿条2
‑
4以相反的方向前后移动带动两个第一连接柱1
‑
4相互靠近或远离,两个第一连接柱1
‑
4相互靠近或远离带动两个滑动夹板1
‑
3相互靠近或远离,达到夹持和放置物体的目的。
25.具体实施方式四:
26.下面结合图1、2、3、4、5说明本实施方式,本实施方式对实施方式一作进一步说明,所述的转动固定装置3包括第二电机3
‑
1、连接圆筒3
‑
2、固定架3
‑
3、夹持圆环3
‑
4、第一气缸3
‑
5和夹持体3
‑
6,连接圆筒3
‑
2固定连接在第二电机3
‑
1的输出轴上,两个固定架3
‑
3分别固定连接在连接圆筒3
‑
2上下两端,夹持圆环3
‑
4固定连接在两个固定架3
‑
3左端,多个第一气缸3
‑
5均固定连接在夹持圆环3
‑
4内部,多个夹持体3
‑
6分别固定连接在多个第一气缸3
‑
5内,连接圆柱1
‑
1左端位于连接圆筒3
‑
2内,多个夹持体3
‑
6位于连接圆柱1
‑
1右侧设的锥面处,第二电机3
‑
1转动带动连接圆筒3
‑
2转动,连接圆筒3
‑
2转动带动两个固定架3
‑
3以连接圆筒3
‑
2的轴线为轴线转动,两个固定架3
‑
3转动带动夹持圆环3
‑
4转动,夹持圆环3
‑
4转动带动第一气缸3
‑
5转动,第一气缸3
‑
5转动带动夹持体3
‑
6转动,多个第一气缸3
‑
5伸出将多个夹持体3
‑
6压在连接圆柱1
‑
1的锥面处对夹持装置1进行固定,多个夹持体3
‑
6转动带动夹持装置1转动,可以实现将不同姿态的物体夹持同时可以以不同的姿态放置,在需要更换夹具体或需要维修保养时,多个第一气缸3
‑
5收缩,操作者将夹持装置1和转动固定装置3分离达到可以实现机械手臂可以拆分,可以简单的更换夹持用具,在需要维修的时候,可以将装置进行拆分,方便维修和保养的效果。
27.具体实施方式五:
28.下面结合图1、2、3、4、5说明本实施方式,本实施方式对实施方式一作进一步说明,所述的移动装置4包括第二连接柱4
‑
1、滑块4
‑
2、丝杠架4
‑
3、第三电机4
‑
4和丝杠4
‑
5,滑块4
‑
2左端滑动连接在第二连接柱4
‑
1上,丝杠架4
‑
3固定连接在第二连接柱4
‑
1右侧,第三电机4
‑
4固定连接在丝杠架4
‑
3内部上顿,丝杠4
‑
5上端固定连接在第三电机4
‑
4上,丝杠4
‑
5下端转动连接在丝杠架4
‑
3下端,滑块4
‑
2右端螺纹连接在丝杠4
‑
5上,第二电机3
‑
1固定连接在滑块4
‑
2左端,第三电机4
‑
4转动带动丝杠4
‑
5转动,丝杠4
‑
5转动带动滑块4
‑
2在第二连接柱4
‑
1的限位下上下移动,实现将夹持的物体放在不同高度的效果。
29.本实用新型一种人形机器人手臂的工作原理:第一电机2
‑
2转动带动齿轮2
‑
3转动,齿轮2
‑
3转动带动两个齿条2
‑
4在两个滑槽2
‑
5以相反的方向前后移动,两个齿条2
‑
4以相反的方向前后移动带动两个第一连接柱1
‑
4相互靠近或远离,两个第一连接柱1
‑
4相互靠近或远离带动两个滑动夹板1
‑
3相互靠近或远离,达到夹持和放置物体的目的,第二电机3
‑
1转动带动连接圆筒3
‑
2转动,连接圆筒3
‑
2转动带动两个固定架3
‑
3以连接圆筒3
‑
2的轴线为轴线转动,两个固定架3
‑
3转动带动夹持圆环3
‑
4转动,夹持圆环3
‑
4转动带动第一气缸3
‑
5转动,第一气缸3
‑
5转动带动夹持体3
‑
6转动,多个第一气缸3
‑
5伸出将多个夹持体3
‑
6压在
连接圆柱1
‑
1的锥面处对夹持装置1进行固定,多个夹持体3
‑
6转动带动夹持装置1转动,可以实现将不同姿态的物体夹持同时可以以不同的姿态放置,在需要更换夹具体或需要维修保养时,多个第一气缸3
‑
5收缩,操作者将夹持装置1和转动固定装置3分离达到可以实现机械手臂可以拆分,可以简单的更换夹持用具,在需要维修的时候,可以将装置进行拆分,方便维修和保养的效果,第三电机4
‑
4转动带动丝杠4
‑
5转动,丝杠4
‑
5转动带动滑块4
‑
2在第二连接柱4
‑
1的限位下上下移动,实现将夹持的物体放在不同高度的效果。
30.当然,上述说明并非对本实用新型的限制,本实用新型也不仅限于上述举例,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。