1.本发明涉及一种进行将安装于基板的半导体元件的电极与基板的电极连接的线的形状的测量的线形状测量装置、产生线的三维图像的方法以及进行线形状的测量的线形状测量方法。
背景技术:
2.正进行将半导体芯片的衬垫(pad)与基板的引线(lead)连接的接合线(以下称为线)的线弧(loop)形状的测量。作为测量线的线弧形状的方法,提出有下述方法,即:通过检测光学系统的聚焦高度的线的xy坐标,从而测量线整体的三维形状(例如参照专利文献1)。
3.所述方法利用环状照明器将线照明,利用使焦点深度变浅的光学系统一边使聚焦高度变化一边拍摄线图像,检测在各线图像的中心出现的暗部,由此检测各聚焦高度的线的各xy坐标,根据这些数据检测线整体的三维形状。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利第3235009号说明书
技术实现要素:
7.发明所要解决的问题
8.此外,近年来要求进行将半导体芯片的电极与基板的电极连接的所有线的形状的测量。然而,在专利文献1所记载的线的形状测量方法中,需要使光学系统的聚焦高度变化并拍摄多个图像,故而有检查耗费的时间变长的问题。
9.另外,也要求线的形状测量的高精度化。若如专利文献1所记载的现有技术那样利用环状照明器将线照明,则有时在线沿大致水平方向延伸的部分,在聚焦点成为线的中心线附近为暗部,而成为线的宽度方向两端的边缘变亮的图像,但在线倾斜的部分,与之相反而成为线的中心线附近变亮,且线的宽度方向两端的边缘变暗的图像。因此,专利文献1所记载的现有技术存在下述情形,即:对于具有倾斜部分的线而言,线整体的三维形状的检测精度降低。
10.因此,本发明的目的在于提供一种可高精度且在短时间内进行线的形状测量的线形状测量装置。
11.解决问题的技术手段
12.本发明的线形状测量装置为半导体装置的线形状测量装置,所述半导体装置包括:基板;半导体元件,安装于基板;以及线,将半导体元件的电极与基板的电极连接,或将半导体元件的一个电极与半导体元件的其他电极连接,所述线形状测量装置的特征在于包括:多个照相机,拍摄半导体装置的二维图像;以及控制部,基于各照相机获取的半导体装置的各二维图像进行线的形状测量,控制部通过使用线对基板或半导体元件的连接位置信息及线的粗度信息的图案匹配,由各照相机所获取的半导体装置的各二维图像产生线的三
维图像,基于所产生的线的三维图像进行线的形状测量。
13.如此,通过使用线对基板或半导体元件的连接位置信息及线的粗度信息的图案匹配,由各照相机所获取的半导体装置的各二维图像产生线的三维图像,故而可在短时间内以良好的精度产生三维图像。由此,可提供一种可高精度且在短时间内进行线的形状测量的线形状测量装置。
14.在本发明的线形状测量装置中,控制部也可使用线对基板或半导体元件的连接位置信息及线的粗度信息,自各照相机所获取的半导体装置的各二维图像中分别提取与线的一个部位对应的各二维图像中的各点的各二维坐标,使用所提取的各二维坐标算出线的一个部位的一个三维坐标,基于所算出的三维坐标产生线的三维图像。
15.另外,在本发明的线形状测量装置中,控制部也可通过自线的开端至末端为止重复进行以下操作,来提取与线的多个部位分别对应的各二维图像中的各点的各二维坐标,所述操作为使用线对基板或半导体元件的连接位置信息及线的粗度信息,自各照相机所获取的半导体装置的各二维图像中分别提取与线的一个部位对应的各二维图像中的各点的各二维坐标,使用所提取的与线的多个部位分别对应的各二维图像中的各二维坐标算出线的多个部位的各三维坐标,基于所算出的线的多个部位的各三维坐标产生线的自开端至末端为止的三维图像。
16.如此,使用线对基板或半导体元件的连接位置信息及线的粗度信息,自照相机所拍摄的半导体装置整体的二维图像中确定线的图像,提取所述线图像上的点的二维坐标,故而可自半导体装置整体的二维图像中在短时间提取线的图像上的点的二维坐标。由此,可提供一种可高精度且在短时间内进行线的形状测量的线形状测量装置。
17.在本发明的线形状测量装置中,照相机也能够以光轴与线的延伸方向交叉的方式分别配置于线的两侧。
18.通过如此配置各照相机,从而由各照相机所拍摄的与线的一个部位对应的各二维图像中的各点的各二维坐标的差异变大,能够以良好的精度算出线的一个部位的三维坐标,可提高线的形状测量的精度。
19.在本发明的线形状测量装置中,控制部可基于所产生的线的三维图像进行线的形状检查,也可通过将所产生的线的三维图像与线的基准形状进行比较从而进行线的形状检查,也可通过自所产生的线的三维图像提取线的形状参数并将所提取的形状参数与形状参数的基准值进行比较,从而进行线的形状检查。
20.由此,可进行线的各种形状测量、形状检查。
21.本发明的线三维图像产生方法为半导体装置的线三维图像产生方法,所述半导体装置包括:基板;半导体元件,安装于基板;以及线,将半导体元件的电极与基板的电极连接,或将半导体元件的一个电极与半导体元件的其他电极连接,所述线三维图像产生方法的特征在于包括:摄像步骤,利用多个照相机分别拍摄半导体装置的二维图像;以及三维图像产生步骤,通过使用线对基板或半导体元件的连接位置信息及线的粗度信息的图案匹配,由各照相机所获取的半导体装置的各二维图像产生线的三维图像。
22.如此,通过使用线对基板或半导体元件的连接位置信息及线的粗度信息的图案匹配,由各照相机所获取的半导体装置的各二维图像产生线的三维图像,故而可在短时间内高精度地产生三维图像。
23.在本发明的线三维图像产生方法中,三维图像产生步骤也可包括:二维坐标提取步骤,使用线对基板或半导体元件的连接位置信息及线的粗度信息,自各照相机所获取的半导体装置的各二维图像中分别提取与线的一个部位对应的各二维图像中的各点的各二维坐标;三维坐标算出步骤,使用所提取的各二维坐标算出线的一个部位的一个三维坐标;以及图像产生步骤,基于所算出的三维坐标产生线的三维图像。
24.另外,在本发明的线三维图像产生方法中,二维坐标提取步骤也可通过自线的开端至末端为止重复进行下述操作,来提取与线的多个部位分别对应的各二维图像中的各点的各二维坐标,所述操作为使用线对基板或半导体元件的连接位置信息及线的粗度信息,自各照相机所获取的半导体装置的各二维图像中分别提取与线的一个部位对应的各二维图像中各点的各二维坐标,三维坐标算出步骤使用所提取的与线的多个部位分别对应的各二维图像中的各二维坐标算出线的多个部位的各三维坐标,图像产生步骤基于所算出的线的多个部位的各三维坐标产生线的自开端至末端为止的三维图像。
25.如此,使用线对基板或半导体元件的连接位置信息及线的粗度信息,自照相机所拍摄的半导体装置整体的二维图像中确定线的图像,提取所述线图像上的点的二维坐标,故而可自半导体装置整体的二维图像中在短时间内提取线的图像上的点的二维坐标。
26.本发明的线形状测量方法为半导体装置的线形状测量方法,所述半导体装置包括:基板;半导体元件,安装于基板;以及线,将半导体元件的电极与基板的电极连接,或将半导体元件的一个电极与半导体元件的其他电极连接,所述线形状测量方法的特征在于包括:摄像步骤,利用多个照相机分别拍摄半导体装置的二维图像;三维图像产生步骤,通过使用线对基板或半导体元件的连接位置信息及线的粗度信息的图案匹配,由各照相机所获取的半导体装置的各二维图像产生线的三维图像;以及测量步骤,基于所产生的线的三维图像进行线的形状测量。
27.另外,在本发明的线形状测量方法中,也可包括:检查步骤,基于所产生的线的三维图像进行线的形状检查,检查步骤通过将所产生的线的三维图像与线的基准形状进行比较从而进行线的形状检查。另外,检查步骤也可通过自所产生的线的三维图像提取线的形状参数并将所提取的形状参数与形状参数的基准值进行比较,从而进行线的形状检查。
28.由此,可进行线的各种形状测量、形状检查。
29.发明的效果
30.本发明可提供一种可高精度且在短时间内进行线的形状测量的线形状测量装置。
附图说明
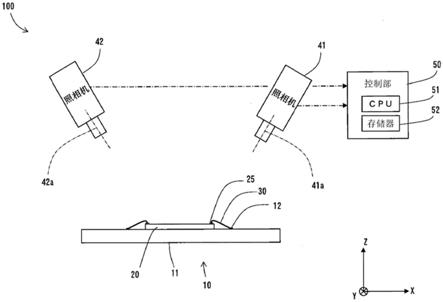
31.图1为表示实施方式的线形状测量装置的立面图。
32.图2为表示实施方式的线形状测量装置的平面图。
33.图3为表示实施方式的线形状测量装置的运行的流程图。
34.图4为表示实施方式的线形状测量装置的照相机与线的配置的立体图。
35.图5为表示利用配置于实施方式的线形状测量装置的半导体装置的y方向正侧的照相机拍摄线的二维图像的说明图。
36.图6为表示利用配置于实施方式的线形状测量装置的半导体装置的y方向负侧的照相机拍摄线的二维图像的说明图。
具体实施方式
37.以下,一面参照附图一面对实施方式的线形状测量装置100进行说明。如图1、图2所示,线形状测量装置100为测量半导体装置10的线30的形状的装置,所述半导体装置10包括基板11、安装于基板11的半导体元件20、以及将半导体元件20的电极25与基板11的电极12连接的线30。线形状测量装置100包括:多个照相机41~44,拍摄半导体装置10的二维图像;以及控制部50,基于照相机41~照相机44所获取的二维图像进行线30的形状的检查。再者,以下的说明中,以x方向、y方向为在水平面彼此正交的方向,z方向为垂直方向来进行说明。
38.如图2所示,照相机41、照相机42以光轴41a、光轴42a沿x方向延伸的方式配置,且以自x方向的斜上方拍摄半导体装置10的方式配置。另外,照相机43、照相机44以光轴43a、光轴44a沿y方向延伸的方式配置,且以自y方向的斜上方拍摄半导体装置10的方式配置。因此,照相机41、照相机42以光轴41a、光轴42a与沿y方向延伸的线30交叉的方式配置于沿y方向延伸的线30的两侧,照相机43、照相机44以光轴43a、光轴44a与沿x方向延伸的线30交叉的方式配置于沿x方向延伸的线30的两侧。各照相机41~44连接于控制部50,各照相机所获取的图像的数据输入至控制部50。控制部50为包括于内部进行信息处理的中央处理器(central processing unit,cpu)51及保存数据或程序等的存储器52的计算机。
39.继而,一面参照图3~图6一面对实施方式的线形状测量装置100的运行进行说明。以下的说明中,设为下述情况进行说明,即:如图4所示,基于利用在y方向正侧配置于线30的斜上侧的照相机43对在半导体元件20的电极25与基板11的电极12之间沿x方向延伸的线30进行拍摄所得的二维图像,以及利用在y方向负侧配置于线30的斜上侧的照相机44对所述线30进行拍摄所得的二维图像,产生线30的三维图像,使用所产生的三维图像进行沿x方向延伸的线30的形状的检查。在图4中,符号35~符号37、符号39表示位于二维坐标检测区域60(下文将参照图5、图6进行说明)的线30的部位,所述二维坐标检测区域60进行将线30的开端31与末端32连结的x轴的中间每隔既定的间隔δx设定线30的二维坐标的检测。
40.如图3的步骤s101所示,控制部50的cpu 51自存储器52读出线30的连接于半导体元件20的电极25的开端31及连接于基板11的电极12的末端32的各坐标(xs,ys)、(xe,ye)。此处,各坐标为线30对半导体元件20的连接位置信息。另外,控制部50的cpu 51自存储器52读出作为线30的粗度信息的线30的直径。
41.继而,控制部50如图3的步骤s102所示,利用照相机43、照相机44拍摄半导体装置10的图像,如图3的步骤s103所示,将拍摄的图像保存于存储器52。
42.在利用配置于半导体装置10的y方向正侧的照相机43拍摄线30的情形时,照相机43获取的线30的二维图像如图5所示,成为根据线30的高度的变化而向y方向负侧弯曲的图像。另外,在利用配置于半导体装置10的y方向负侧的照相机44拍摄线30的情形时,照相机44获取的线30的二维图像如图6所示,成为根据线30的高度的变化而向y方向正侧弯曲的图像。
43.继而,控制部50如图3的步骤s104、图5所示,在照相机43所获取的图像中的将线30的开端31与末端32连结的x轴的中间,每隔既定的间隔δx设定进行线30的二维坐标的检测的二维坐标检测区域60。继而,控制部50如图3的步骤s105所示,使用图案匹配自二维坐标检测区域60中检索与线30的直径同样的粗度的线状的图像。而且,控制部50检测出与线30
的直径同样的粗度的图像后,获取所述图像的中心点的二维坐标作为(x31,y31)、(x32,y32)、(x33,y33)并保存于存储器52。所述二维坐标(x31,y31)、二维坐标(x32,y32)、二维坐标(x33,y33)为与图4所示的线30的部位35~部位36对应的二维坐标。而且,控制部50自开端31至末端32为止重复进行获取所述二维坐标的动作,获取自开端31至末端32为止的所有二维坐标检测区域60中的、与线30的直径同样的粗度的图像的中心点的二维坐标(x31,y31)~二维坐标(x3e,y3e)。这些二维坐标为与线30的部位35~部位39分别对应的二维坐标。
44.同样地,控制部50如图6所示,在照相机44所获取的图像中设定二维坐标检测区域60,使用图案匹配来检索二维坐标检测区域60中的、与线30的直径同样的粗度的线状的图像。而且,控制部50检测出与线30的直径同样的粗度的图像后,获取所述图像的中心点的二维坐标作为(x41,y41)~(x4e,y4e)并保存于存储器52。这些二维坐标为与线30的部位35~部位39分别对应的二维坐标。继而,控制部50若在图3的步骤s106中判断为是,则进入图3的步骤s107。
45.在图3的步骤s105中自照相机43的图像获取的二维坐标(x31,y31)和自照相机44的图像获取的二维坐标(x41,y41)为与图4所示的线30的相同的部位35对应的二维坐标,故而可根据两个二维坐标及各照相机43、44的位置来计算线30的部位35的三维坐标。同样地,自照相机43的图像获取的二维坐标(x32,y32)、二维坐标(x33,y33)和自照相机44的图像获取的二维坐标(x42,y42)、二维坐标(x43,y43)为与图4所示的线30的相同的部位36、部位37对应的二维坐标,可根据这些坐标算出线30的部位36、部位37的三维坐标。
46.因此,控制部50在图3的步骤s107中,基于由照相机43所获取的线30的自开端31至末端32为止的各二维坐标(x31,y31)~(x3e,y3e)、由照相机44所获取的线30的自开端31至末端32为止的各二维坐标(x41,y41)~(x4e,y4e)、以及照相机43及照相机44的各位置,算出图4所示的线30的自开端31至末端32为止的多个部位35~39的三维坐标。
47.继而,控制部50在图3的步骤s108中,将所算出的多个部位35~39的三维坐标相连而产生线30的三维图像。因此,线30的三维图像成为三维地弯曲的曲线。
48.控制部50在图3的步骤s109中,基于所产生的线30的三维图像进行线30的形状尺寸的测量。另外,控制部50也可将所产生的线30的三维图像与线30的基准线弧形状等基准形状进行比较,检测两者的尺寸的差异,在差异超过既定的阈值的情形时判断为线30的形状异常。
49.另外,控制部50也可通过自所产生的线30的三维图像测量线30的形状参数,例如距线30的开端31的高度即线弧高度、形成于开端31的压接球的厚度、压接球的直径等形状尺寸,并将所测量的各形状尺寸与基准值比较,从而进行检查。
50.如以上所说明那样,线形状测量装置100通过使用线30的开端31及末端32的二维坐标(xs,ys)、(xe,ye)以及线30的直径的图案匹配,由各照相机43、44所获取的半导体装置10的各二维图像产生线30的三维图像,故而可在短时间内以良好的精度产生三维图像。由此,可高精度且在短时间内进行线30的形状测量、形状检查。
51.再者,沿y方向延伸的线30的形状的检查以后,基于照相机41、照相机42所拍摄的各二维图像进行同样的处理,由此进行形状测量、形状检查。
52.另外,也可对由四个照相机41~44而非两个照相机41、42或照相机43、44所获取的
二维图像进行处理,产生线30的三维图像。另外,也可对四个以上的照相机的二维图像进行处理而产生线30的三维图像。
53.在以上说明的实施方式中,关于进行形状的测量或形状的检查的线30,设为将半导体元件20的电极25与基板11的电极12连接的线进行了说明,但不限于此。例如,也可适用于半导体装置10在基板11之上层叠多个半导体元件20,将各层的半导体元件20的各电极25、最下层的半导体元件20的电极25及基板11的电极12连续地连接的线30的形状的检查。在所述情形时,线30将一个层的半导体元件20的一个电极25与其他层的半导体元件20的其他电极25连接,并且将最下层的半导体元件20的电极25与基板11的电极12连接。
54.另外,在使用实施方式的线形状测量装置100执行线形状测量方法的情形时,如图3所示的步骤s102、步骤s103所示那样利用照相机拍摄半导体装置10的二维图像并保存于存储器52的步骤相当于摄像步骤。另外,如图3的步骤s104~步骤s108所示那样由所拍摄的二维图像产生线30的三维图像的步骤构成三维图像产生步骤,如图3的步骤s109所示那样基于三维图像进行线30的形状的测量的步骤构成测量步骤。另外,如图3的步骤s109所示那样基于三维图像进行线30的形状的检查的步骤构成检查步骤。
55.另外,如图3的步骤s104~步骤s106那样提取二维坐标的步骤构成二维坐标提取步骤,如图3的步骤s107所示那样基于所提取的二维坐标算出三维坐标的步骤构成三维坐标算出步骤,如图3的步骤s108所示那样根据所算出的三维坐标产生线30的三维图像的步骤构成图像产生步骤。
56.另外,在使用实施方式的线形状测量装置100执行线三维图像产生方法的情形时,如图3的步骤s102、步骤s103所示那样利用照相机拍摄半导体装置10的二维图像并保存于存储器52的步骤相当于摄像步骤。另外,如图3的步骤s104~步骤s108那样由所拍摄的二维图像产生线30的三维图像的步骤构成三维图像产生步骤。
57.符号的说明
58.10:半导体装置
59.11:基板
60.12、25:电极
61.20:半导体元件
62.30:线
63.31:开端
64.32:末端
65.41~44:照相机
66.41a~44a:光轴
67.50:控制部
68.51:cpu
69.52:存储器
70.60:二维坐标检测区域
71.100:线形状测量装置
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。