1.本实用新型涉及环境工程技术领域,特别涉及一种垃圾填埋场底部防渗系统渗漏自动化检测系统。
背景技术:
2.我国现阶段垃圾的主要处理方式仍以填埋场为主,由于我国生活垃圾有机物含量高,在长期的填埋过程中会产生大量垃圾渗沥液。垃圾填埋场底部防渗系统通常由高密度聚乙烯膜(hdpe)、膨润土垫层等材料组合而成的复合系统,其在完整的情况下能有效阻止垃圾渗沥液渗入其下土体中。但由于hdpe膜及其上渗沥液导排层的铺设极易造成对hdpe膜的损坏,如不及时发现并进行修补,有漏洞的hdpe膜会导致垃圾渗沥液渗漏到附近土体中,造成严重的生态污染。因此在垃圾填埋场运营前对hdpe膜进行检测尤为重要。
3.现阶段我国对运营前填埋场渗沥液导排层下hdpe膜的检测方式主要为人工手持偶极子检测杆,沿预先设定的检测路线进行检测。该方法检测线路精确控制难度大、检测点间距同一化程度低,较难对检测程序进行标准化管理。另外,该方法易受现场条件以及检测人员素质等因素的影响,造成漏洞定位准确度低、错检、漏检情况突出。
技术实现要素:
4.本技术提供了一种垃圾填埋场底部防渗系统渗漏自动化检测系统,解决或部分解决了现有技术易受现场条件以及检测人员素质等因素的影响,造成漏洞定位准确度低、错检、漏检情况突出的技术问题;实现了减少人工检测工作量、降低检测成本的目的,并为垃圾填埋场防渗层渗漏检测程序的标准化管理提供了保障。
5.本技术所提供的一种垃圾填埋场底部防渗系统渗漏自动化检测系统,包括:底盘、走行装置、2个三角探测轮、导电溶液存储箱、电势检测部件,其中,
6.所述走行装置设置在所述底盘下方,带动所述底盘移动;
7.2个所述三角探测轮都通过弹簧连接在所述底盘下方,所述三角探测轮包括:三角主体、设置在所述三角主体的3个角部位置的素瓷角、3根从所述三角主体的中心位置向角部位置延伸的导电部件,所述三角主体设置有3个溶液输送通道;所述溶液输送通道的一端连通位于所述三角主体中心位置的溶液入口,另一端伸入所述素瓷角中;所述素瓷角设置有盛装导电溶液的容腔;
8.所述导电溶液存储箱设置在所述底盘上,通过输液管道连通所述三角主体的溶液入口;所述导电溶液存储箱将所述导电溶液通过所述输液管道及所述溶液输送通道送至所述素瓷角的容腔中;
9.所述电势检测部件通过导线分别连通2个所述三角探测轮的导电部件,以获得2个所述三角探测轮之间的电势差。
10.作为优选,所述三角探测轮的中心设置有套设在所述输液管道上的连接管;所述连接管上套设有轴承,所述轴承的外圈连接一杆件,所述杆件通过所述弹簧连接在所述底
盘下方。
11.作为优选,所述导电部件为导电铜棒;所述导电溶液为cuso4·
5h2o晶体的溶液;所述cuso4·
5h2o晶体的溶液能从所述素瓷角内渗出。
12.作为优选,所述导电溶液存储箱与所述三角主体之间的输液管道上设置有蠕动泵。
13.作为优选,所述走行装置包括:电池、驱动马达、传动轴、转向器及车轮,
14.所述电池与所述转向器及所述驱动马达连通形成走行驱动电路;
15.所述传动轴转动设置在所述底盘下方;
16.所述车轮设置在所述传动轴上;
17.所述转向器连接所述车轮,以控制所述车轮的方向;
18.所述驱动马达的输出端连接所述传动轴,以驱动所述传动轴转动。
19.作为优选,还包括控制器,与所述电势检测部件连接,接收所述电势检测部件发送的电势差信息。
20.作为优选,还包括激光雷达模块、惯性模块,所述激光雷达模块用于构建填埋场被检区域的环境地图,以及确定所述走行装置的位置;所述惯性模块用于确定所述走行装置的朝向;所述激光雷达模块及所述惯性模块与所述控制器电性连接,将所述走行装置的位置信息和朝向信息发送给所述控制器;所述控制器与所述走行驱动电路电性连接,根据所述走行装置的位置信息和朝向信息控制所述走行驱动电路,进而控制所述驱动马达的启停、转速及所述转向器的转向。
21.作为优选,所述控制器的数据处理模块设定有充电预警值,当所述电池的电量低于所述充电预警值时,所述数据处理模块根据所述走行装置的位置信息和朝向信息设定所述走行装置从当前位置到充电设备的规划路线,使所述走行装置沿所述规划路线行进至充电设备位置。
22.本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
23.本技术通过设置由底盘、走行装置、2个三角探测轮、导电溶液存储箱、电势检测部件组成的渗漏自动化检测系统,在行进过程中,走行装置底部三角探测轮随即转动,前后三角探测轮皆通过弹簧与底盘连接,保证各角点在三角探测轮滚动过程中均能与渗沥液导排层充分接触。三角探测轮各角点端部为素瓷角结构,内部的导电溶液由设置在底盘上的导电溶液存储箱供给。在检测过程中,电信号通过内置的导电铜棒传输至电势检测部件,进而由控制器进行数据处理。在走行装置缓慢行进过程中,电势检测部件自动记录前后三角探测轮所测电势差,当前后三角探测轮极性反向时,走行装置停止行进,两三角探测轮连线的中点在渗沥液导排层上的投影即为疑似渗漏点,走行装置带动电势检测部件在疑似渗漏点及附近区域重复测量,再次出现的极性反向点被确定为渗漏点,这样,解决或部分解决了现有技术易受现场条件以及检测人员素质等因素的影响,造成漏洞定位准确度低、错检、漏检情况突出的技术问题;实现了减少人工检测工作量、降低检测成本的目的,并为垃圾填埋场防渗层渗漏检测程序的标准化管理提供了保障。
附图说明
24.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现
有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.图1为本技术实施例提供的垃圾填埋场底部防渗系统渗漏自动化检测系统的结构俯视图;
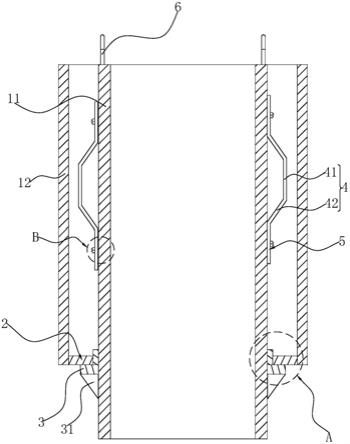
26.图2为本技术实施例提供的垃圾填埋场底部防渗系统渗漏自动化检测系统的结构主视图;
27.图3为本技术实施例提供的三角探测轮的结构示意图。
28.(附图中各标号代表的部件依次为:1底盘;2蠕动泵;3导电溶液存储箱;4电池;5驱动马达;6三角探测轮;61三角主体;62素瓷角;63导电部件;64溶液输送通道;7控制器;8车轮;9惯性模块;10弹簧;11激光雷达模块;12轴承;13电势检测部件)
具体实施方式
29.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
30.参见附图1~2,本技术提供的垃圾填埋场底部防渗系统渗漏自动化检测系统,包括:底盘1、走行装置、2个三角探测轮6、导电溶液存储箱3、电势检测部件13,其中,
31.走行装置设置在底盘1下方,带动底盘1移动;2个三角探测轮6都通过弹簧10连接在底盘1下方,参见附图3,三角探测轮6包括:三角主体61、设置在三角主体61的3个角部位置的素瓷角62、3根从三角主体61的中心位置向角部位置延伸的导电部件63,三角主体61设置有3个溶液输送通道64;溶液输送通道64的一端连通位于三角主体61中心位置的溶液入口,另一端伸入素瓷角62中;素瓷角62设置有盛装导电溶液的容腔。弹簧10能保证各素瓷角62在三角探测轮6滚动过程中均能与渗沥液导排层充分接触。
32.导电溶液存储箱3设置在底盘1上,通过输液管道连通三角主体61的溶液入口;导电溶液存储箱3将导电溶液通过输液管道及溶液输送通道64送至素瓷角62的容腔中;电势检测部件通过导线分别连通2个三角探测轮6的导电部件63,以获得2个三角探测轮6之间的电势差。
33.进一步的,三角探测轮6的中心设置有套设在输液管道上的连接管;连接管上套设有轴承12,轴承12的外圈连接一杆件,杆件通过弹簧10连接在底盘1下方。
34.进一步的,导电部件63为导电铜棒;导电溶液为cuso4·
5h2o晶体的溶液;cuso4·
5h2o晶体的溶液能从素瓷角62内渗出。导电溶液存储箱3与三角主体61之间的输液管道上设置有蠕动泵2,设置蠕动泵2为了保证cuso4·
5h2o晶体的溶液能时刻与素瓷角62充分接触。
35.进一步的,走行装置包括:电池4、驱动马达5、传动轴、转向器及车轮8,电池4与转向器及驱动马达5连通形成走行驱动电路,电池4可以为锂电池;传动轴转动设置在底盘1下方;车轮8设置在传动轴上;转向器连接车轮8,以控制车轮8的方向;驱动马达5的输出端连接传动轴,以驱动传动轴转动。
36.进一步的,还包括控制器7,与电势检测部件13连接,接收电势检测部件13发送的电势差信息。还包括激光雷达模块11、惯性模块9,激光雷达模块11用于构建填埋场被检区域的环境地图,以及确定走行装置的位置;惯性模块9用于确定走行装置的朝向,具体可以是磁强计;激光雷达模块11及惯性模块9与控制器7电性连接,将走行装置的位置信息和朝向信息发送给控制器7;控制器7与走行驱动电路电性连接,根据走行装置的位置信息和朝向信息控制走行驱动电路,进而控制驱动马达5的启停、转速及转向器的转向。在走行装置缓慢行进过程中,前后三角探测轮6各有一素瓷角62同时与渗沥液导排层接触,调整走行装置行进速度,使此接触时间不少于1秒,目的为使所测电势差数据稳定。
37.控制器7的数据处理模块设定有充电预警值,当电池4的电量低于充电预警值时,数据处理模块根据走行装置的位置信息和朝向信息设定走行装置从当前位置到充电设备的规划路线,使走行装置沿规划路线行进至充电设备位置。
38.基于同样的发明构思,本技术还提供了一种垃圾填埋场底部防渗系统渗漏自动化检测方法,通过垃圾填埋场底部防渗系统渗漏自动化检测系统实现,包括以下步骤:
39.s1:通过激光雷达模块11构建填埋场被检区域的环境地图。具体为:激光雷达模块11在填埋场被检区域收集激光雷达数据,运用定位同时构建地图(slam)的方法构建被检区域的总体环境地图,此环境地图在电脑端实时显示。
40.s2:在填埋场的防渗层下设置膜下电极,在防渗层上设置膜上电极;膜下电极连接高压发生器的负极;膜上电极连接高压发生器的正极。
41.s3:检测前在被检区域的渗沥液倒排层表面洒水,开启高压发生器,调节至设定电压。
42.s4:将被检区域划分为若干子区域,以膜上电极为中心标记多条放射状检测线,走行装置沿放射状检测线行进,完成所有子区域的检测。
43.进一步的,在步骤s4的检测过程中,利用激光雷达模块11和惯性模块9通过局部规划算法对走行装置的位置及朝向进行实时控制;电势检测部件13自动记录前后两个三角探测轮6所测电势差,当两个三角探测轮6的电势差极性反向时,走行装置停止行进,2个三角探测轮6连线的中点在渗沥液导排层上的投影即为疑似渗漏点;走行装置带动电势检测部件13在疑似渗漏点位置及附近区域重复测量,再次出现的电势差极性反向时,疑似渗漏点被确定为渗漏点。
44.以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。