1.本发明涉及粘钉机器人技术领域,尤其涉及一种槽棒自动斜粘钉机器人。
背景技术:
2.机器人是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用,机器人中的粘钉机械人主体是将石英钉粘接在槽棒上,其在半导体石英制品加工的领域中得到了广泛的使用。
3.当粘钉机械人主体不进行工作时,会一直放置在工作台上,长时间的静放会使粘钉机械人主体上存在较多的灰尘,进而导致粘钉机械人主体各个零件之间联动不灵,使得粘钉机械人主体不能正常使用。
技术实现要素:
4.本发明提出的一种槽棒自动斜粘钉机器人,解决了当粘钉机械人主体不进行工作时,会一直放置在工作台上,长时间的静放会使粘钉机械人主体上存在较多的灰尘,进而导致粘钉机械人主体各个零件之间联动不灵,使得粘钉机械人主体不能正常使用的问题。
5.为了实现上述目的,本发明采用了如下技术方案:一种槽棒自动斜粘钉机器人,包括防护箱和设置在防护箱内的粘钉机械人主体,所述防护箱的内底面安装有电动推杆,所述防护箱内通过滑动组件滑动安装有支撑板,所述电动推杆的输出轴端部与支撑板固定连接,所述粘钉机械人主体安装在支撑板的上表面,所述粘钉机械人主体的左右两侧均设置有半弧辅助板,所述防护箱上表面滑动安装有两个移动挡板,所述移动挡板的一侧面与半弧辅助板相抵触。
6.采用上述方案,通过设置电动推杆和移动挡板,利用电动推杆的作用,对支撑板进行上下移动,配合移动挡板和半弧辅助板的作用,粘钉机械人主体移延伸出防护箱时,将移动挡板打开,进而对粘钉机械人主体进行存储保护,防止堆积灰尘,确保粘钉机械人主体能够正常使用。
7.上述方案中,需要说明的是,所述电动推杆与外接电源电性连接。
8.作为一种优选的实施方式,所述滑动组件包括安装在支撑板左右两侧面的滑块二,所述防护箱内壁的左右两侧面均开设有供滑块二滑动的滑槽二,所述滑槽二的内底面安装有弹簧二,所述弹簧二的一端与滑块二固定连接。
9.采用上述方案,通过设置滑块二,利用滑块二在滑槽二内滑动的作用对支撑板进行限位支撑,增大支撑板的稳定性,利用弹簧二的弹性对向下移动的滑块二进行缓冲,使得滑块二稳定缓慢的在滑槽二内向下移动,增大粘钉机械人主体的稳定性。
10.作为一种优选的实施方式,所述防护箱的上表面前后两侧均开设有两个滑槽一,所述滑槽一内滑动安装有滑块一,所述滑槽一内壁的一侧面安装有弹簧一,所述弹簧一的一端与滑块一固定连接,所述移动挡板安装在滑块一的上表面。
11.采用上述方案,通过设置滑块一和弹簧一,利用弹簧一的弹性,使得打开时候移动
挡板进行自动复位,配合滑块一在滑槽一内滑动的作用,使得移动挡板稳定的进行左右移动。
12.作为一种优选的实施方式,所述支撑板上表面的左右两侧均开设有两个定位槽二,所述定位槽二内设置有定位销二,所述定位销二安装在半弧辅助板的下表面。
13.采用上述方案,通过设置定位销二,利用定位销二对半弧辅助板进行固定,配合定位槽二的作用,方便后期对半弧辅助板进行拆卸,操作便捷。
14.作为一种优选的实施方式,两个所述半弧辅助板相对的一侧面均安装有两个u形板,相对的两个所述u形板之间安装有同一个横板。
15.采用上述方案,通过设置横板和u形板,利用横板在两个u形板之间的作用,对两个半弧辅助板进行支撑,防止两个半弧辅助板受到移动挡板的挤压而变形。
16.作为一种优选的实施方式,所述移动挡板的上表面均滑动安装有定位销一,所述防护箱表面的左右两侧均开设有两个与定位销一相配合使用的定位槽一。
17.采用上述方案,通过设置定位销一,利用定位销一与定位槽一相配合的作用,对打开之后的移动挡板进行固定,进而粘钉机械人主体进行工作。
18.本发明中:
19.该槽棒自动斜粘钉机器人,通过设置电动推杆和移动挡板,利用电动推杆的作用,对支撑板进行上下移动,配合移动挡板和半弧辅助板的作用,粘钉机械人主体移延伸出防护箱时,将移动挡板打开,进而对粘钉机械人主体进行存储保护,防止堆积灰尘,确保粘钉机械人主体能够正常使用;
20.该槽棒自动斜粘钉机器人,通过设置横板和u形板,利用横板在两个u形板之间的作用,对两个半弧辅助板进行支撑,防止两个半弧辅助板受到移动挡板的挤压而变形。
附图说明
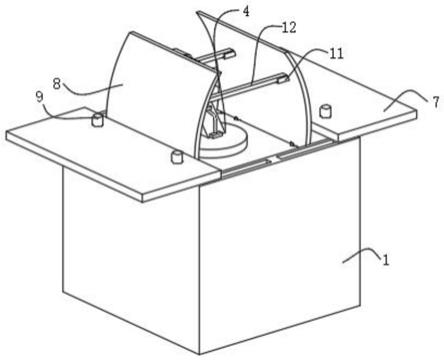
21.图1为本发明的结构示意图;
22.图2为本发明的俯视剖面结构示意图;
23.图3为本发明的图2中a处放大结构示意图;
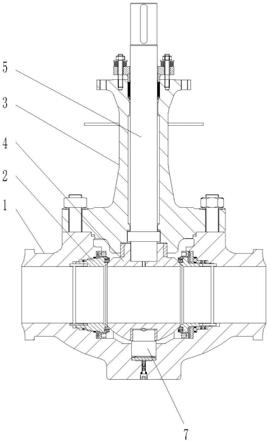
24.图4为本发明的主视剖面结构示意图。
25.图中:1、防护箱;2、电动推杆;3、支撑板;4、粘钉机械人主体;5、滑块一;6、弹簧一;7、移动挡板;8、半弧辅助板;9、定位销一;10、滑槽一;11、u形板;12、横板;13、滑槽二;14、滑块二;15、弹簧二;16、定位销二;17、定位槽一。
具体实施方式
26.实施例
27.参照图1
‑
4,本发明提供一种槽棒自动斜粘钉机器人,包括包括防护箱1和设置在防护箱1内的粘钉机械人主体4,防护箱1的内底面安装有电动推杆2,利用电动推杆2的作用,对支撑板3进行上下移动,防护箱1内通过滑动组件滑动安装有支撑板3,电动推杆2的输出轴端部与支撑板3固定连接,粘钉机械人主体4安装在支撑板3的上表面,粘钉机械人主体4的左右两侧均设置有半弧辅助板8,防护箱1上表面滑动安装有两个移动挡板7,配合移动挡板7和半弧辅助板8的作用,粘钉机械人主体4移延伸出防护箱1时,将移动挡板7打开,移
动挡板7的一侧面与半弧辅助板8相抵触。
28.滑动组件包括安装在支撑板3左右两侧面的滑块二14,防护箱1内壁的左右两侧面均开设有供滑块二14滑动的滑槽二13,利用滑块二14在滑槽二13内滑动的作用对支撑板3进行限位支撑,增大支撑板3的稳定性,滑槽二13的内底面安装有弹簧二15,利用弹簧二15的弹性对向下移动的滑块二14进行缓冲,使得滑块二14稳定缓慢的在滑槽二13内向下移动,增大粘钉机械人主体4的稳定性,弹簧二15的一端与滑块二14固定连接。
29.防护箱1的上表面前后两侧均开设有两个滑槽一10,滑槽一10内滑动安装有滑块一5,配合滑块一5在滑槽一10内滑动的作用,使得移动挡板7稳定的进行左右移动,滑槽一10内壁的一侧面安装有弹簧一6,利用弹簧一6的弹性,使得打开时候移动挡板7进行自动复位,弹簧一6的一端与滑块一5固定连接,移动挡板7安装在滑块一5的上表面。
30.支撑板3上表面的左右两侧均开设有两个定位槽二,定位槽二内设置有定位销二16,利用定位销二16对半弧辅助板8进行固定,配合定位槽二的作用,方便后期对半弧辅助板8进行拆卸,操作便捷,定位销二16安装在半弧辅助板8的下表面。
31.两个半弧辅助板8相对的一侧面均安装有两个u形板11,相对的两个u形板11之间安装有同一个横板12,利用横板12在两个u形板11之间的作用,对两个半弧辅助板8进行支撑,防止两个半弧辅助板8受到移动挡板7的挤压而变形。
32.移动挡板7的上表面均滑动安装有定位销一9,防护箱1表面的左右两侧均开设有两个与定位销一9相配合使用的定位槽一17,利用定位销一9与定位槽一17相配合的作用,对打开之后的移动挡板7进行固定,进而粘钉机械人主体4进行工作。
33.工作原理:当需要对粘钉机械人主体4进行存储时,将定位销二16移进定位槽二内,对半弧辅助板8进行固定,然后将定位销一9向上移动,定位销一9的一端脱离定位槽一17,解除对移动挡板7的固定,然后启动电动推杆2,电动推杆2的输出轴回缩带动支撑板3向下移动,支撑板3向下移动时带动滑块二14在滑槽二13内滑动,此时滑块二14向下挤压弹簧二15,当半弧辅助板8渐渐向下移动时,移动挡板7受到弹簧一6的反作用力逐渐向中间移动,带动滑块一5在滑槽一10内滑动,进而便完成了对粘钉机械人主体4的储存工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。