技术特征:
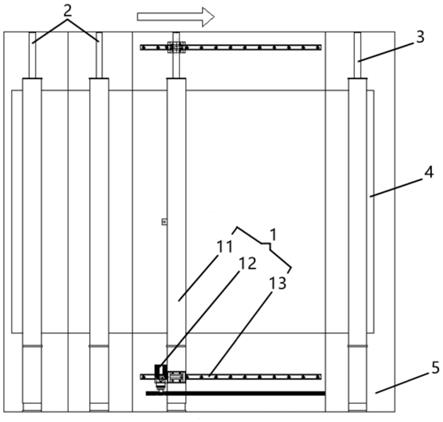
1.一种用于高速玻璃清洗机的动态追踪式风刀系统,其特征在于:包括动态风刀组件(1),所述动态风刀组件(1)包括动态风刀(11)、驱动机构(12)、感应机构;玻璃基板(4)通过传输机构(5)进行传输,所述驱动机构(12)能够驱动所述动态风刀(11)沿平行于玻璃基板传输方向的路线移动;所述感应机构能够感应玻璃基板(4)的位置。2.如权利要求1所述的用于高速玻璃清洗机的动态追踪式风刀系统,其特征在于:所述驱动机构(12)包括伺服电机、齿轮、齿条,所述伺服电机固定连接在所述动态风刀(11)上,所述齿轮固定连接在所述伺服电机的输出轴上,所述齿条固定连接在玻璃清洗机的框架上,所述齿条的长度方向平行于玻璃基板传输方向,所述齿轮与所述齿条啮合。3.如权利要求2所述的用于高速玻璃清洗机的动态追踪式风刀系统,其特征在于:所述动态风刀组件(1)还包括导向机构(13),所述导向机构(13)包括滑块、导轨,所述滑块固定连接在所述动态风刀(11)上,所述导轨固定连接在玻璃清洗机的框架上,所述导轨的长度方向平行于玻璃基板传输方向,所述滑块与所述导轨滑动配合。4.如权利要求1所述的用于高速玻璃清洗机的动态追踪式风刀系统,其特征在于:所述动态风刀(11)的出风方向朝向玻璃基板传输方向的下游并与玻璃基板(4)形成夹角。5.如权利要求1所述的用于高速玻璃清洗机的动态追踪式风刀系统,其特征在于:所述用于高速玻璃清洗机的动态追踪式风刀系统还包括第一固定风刀(2)、第二固定风刀(3),所述第一固定风刀(2)、动态风刀(11)、第二固定风刀(3)沿玻璃基板传输方向依次排列。6.如权利要求5所述的用于高速玻璃清洗机的动态追踪式风刀系统,其特征在于:所述第一固定风刀(2)的出风方向朝向玻璃基板传输方向的上游并与玻璃基板(4)形成夹角。7.如权利要求5所述的用于高速玻璃清洗机的动态追踪式风刀系统,其特征在于:所述第二固定风刀(3)的出风方向垂直于玻璃基板(4)。8.如权利要求1所述的用于高速玻璃清洗机的动态追踪式风刀系统,其特征在于:所述用于高速玻璃清洗机的动态追踪式风刀系统还包括动态风刀仓室,所述动态风刀仓室位于所述动态风刀(11)的移动路线上;所述感应机构包括第一光电传感器、第二光电传感器、第三光电传感器,所述第一光电传感器安装在所述动态风刀仓室的入口处,所述第二光电传感器安装在所述动态风刀(11)上,所述第三光电传感器安装在所述动态风刀仓室的出口处,所述第一光电传感器、第二光电传感器、第三光电传感器均能够感应玻璃基板(4)。9.一种用于高速玻璃清洗机的动态追踪式风刀吹干方法,其特征在于,采用如权利要求1
‑
7任一项所述的用于高速玻璃清洗机的动态追踪式风刀系统,包括以下步骤:玻璃基板(4)沿传输机构(5)连续传输,感应机构感应玻璃基板(4)的位置,动态风刀(11)根据感应机构感应的位置追踪玻璃基板(4)移动,追踪过程中动态风刀(11)对玻璃基板(4)进行持续吹风,追踪结束后动态风刀(11)回到初始位置。10.如权利要求9所述的用于高速玻璃清洗机的动态追踪式风刀吹干方法,其特征在于:所述用于高速玻璃清洗机的动态追踪式风刀系统还包括动态风刀仓室,所述动态风刀仓室位于所述动态风刀(11)的移动路线上;所述感应机构包括第一光电传感器、第二光电传感器、第三光电传感器,所述第一光电传感器安装在所述动态风刀仓室的入口处,所述第二光电传感器安装在所述动态风刀(11)上,所述第三光电传感器安装在所述动态风刀仓室的出口处,所述第一光电传感器、第二光电传感器、第三光电传感器均能够感应玻璃基板
(4);所述用于高速玻璃清洗机的动态追踪式风刀吹干方法具体包括以下步骤:步骤a,玻璃基板(4)沿传输机构(5)连续传输,每片玻璃基板(4)由动态风刀仓室的入口进入动态风刀仓室,当玻璃基板(4)的尾部到达动态风刀仓室的入口时,第一光电传感器感应到玻璃基板(4)的尾部;步骤b,动态风刀(11)的初始位置位于动态风刀仓室的入口处,当第一光电传感器感应到玻璃基板(4)的尾部时,动态风刀(11)开始追赶玻璃基板(4),动态风刀(11)先以加速度a1从速度0加速到大于v0的速度v1,所用时间为t1;再以加速度a1从速度v1减速到速度v0,所用时间为t2;此时动态风刀(11)移动到玻璃基板(4)的尾部,第二光电传感器感应到玻璃基板(4)的尾部,动态风刀(11)保持速度v0追踪玻璃基板(4),追踪持续时间为t,追踪过程中动态风刀(11)对玻璃基板(4)的尾部进行持续吹风;步骤c,当玻璃基板(4)的尾部到达动态风刀仓室的出口时,第三光电传感器感应到玻璃基板(4)的尾部,动态风刀(11)以加速度a1从速度v0减速到速度0,所用时间为t3;然后动态风刀(11)反向移动,先以加速度a2从速度0加速到最大速度v,所用时间为t4;再以加速度a2从速度v减速到速度0,回到初始位置,所用时间为t5;步骤d,计算动态风刀(11)追踪玻璃基板(4)的追踪持续时间t:已知每片玻璃基板(4)的传输周期为t0,玻璃基板(4)的传输速度为v0,并且已知加速度a1和加速度a2;;根据t1 t2的时间里动态风刀(11)与玻璃基板(4)的移动距离相等,得到等式计算得出v1的值,代入t1、t2的计算式中得出t1、t2的值;的值;的值;根据动态风刀(11)的往复距离相同,得到等式:又:t0=t1 t2 t3 t4 t5 t;等式联立后,得到动态风刀(11)追踪玻璃基板(4)的尾部的时间t,实现动态风刀(11)追踪玻璃基板(4)移动的速度算法。
技术总结
本发明公开了一种用于高速玻璃清洗机的动态追踪式风刀系统和吹干方法,涉及玻璃制造领域,该系统包括动态风刀组件,所述动态风刀组件包括动态风刀、驱动机构、感应机构;玻璃基板通过传输机构进行传输,所述驱动机构能够驱动所述动态风刀沿平行于玻璃基板传输方向的路线移动;所述感应机构能够感应玻璃基板的位置。本发明的优点在于:增加了风刀对玻璃基板尾部的吹干时间,大大提高了对玻璃基板尾部的干燥效果,实现了高速吹干;通过一组动态风刀代替多个固定风刀,减少了风刀的数量。减少了风刀的数量。减少了风刀的数量。
技术研发人员:周辉 张一琦 王开西 苗新念 刘洋 于宇 江坤
受保护的技术使用者:蚌埠凯盛工程技术有限公司
技术研发日:2021.09.08
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。