技术特征:
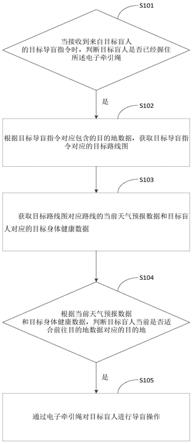
1.一种基于机器人的导盲方法,其特征在于,用于导盲机器人通过自带的电子牵引绳牵引目标盲人行走,其包括:当接收到来自所述目标盲人的目标导盲指令时,判断所述目标盲人是否已经握住所述电子牵引绳;若是,则根据所述目标导盲指令对应包含的目的地数据,获取所述目标导盲指令对应的目标路线图;获取所述目标路线图对应路线的当前天气预报数据和所述目标盲人对应的目标身体健康数据;根据所述当前天气预报数据和所述目标身体健康数据,判断所述目标盲人当前是否适合前往所述目的地数据对应的目的地;若是,则通过所述电子牵引绳对所述目标盲人进行导盲操作。2.根据权利要求1所述的基于机器人的导盲方法,其特征在于,所述根据所述当前天气预报数据和所述目标身体健康数据,判断所述目标盲人当前是否适合前往所述目的地数据对应的目的地,包括:根据所述目标身体健康数据,判断所述目标盲人的身体状况是否适合出行;若是,则进一步判断所述当前天气预报数据对应的天气是否为阴雨天气;若不是,则根据所述目的地数据和所述目标路线图,判定所述目标盲人当前适合前往所述目的地数据对应的目的地。3.根据权利要求1所述的基于机器人的导盲方法,其特征在于,所述通过所述电子牵引绳对所述目标盲人进行导盲操作,包括:根据所述目标路线图按照目标预设速度匀速行走,并判断所述电子牵引绳对应的目标牵引拉力是否大于第一拉力且小于第二拉力;若是,则保持所述目标预设速度继续行走,直至到达所述目的地数据对应的目的地。4.根据权利要求3所述的基于机器人的导盲方法,其特征在于,若所述电子牵引绳对应的目标牵引拉力小于所述第一拉力,则包括:判断所述电子牵引绳是否已经和所述目标盲人脱离接触;若是,则停止前行并提示所述目标盲人重新握住所述电子牵引绳;判断所述目标盲人是否已经重新握住所述电子牵引绳;若是,则重新按照所述目标预设速度继续行走,直至到达所述目的地数据对应的目的地。5.根据权利要求3所述的基于机器人的导盲方法,其特征在于,若所述电子牵引绳对应的目标牵引拉力大于所述第二拉力,则包括:判断所述电子牵引绳是否已经和所述目标盲人脱离接触;若是,则判定所述电子牵引绳已被外物夹持,并停止前行;提示所述目标盲人重新找回并握住所述电子牵引绳。6.根据权利要求5所述的基于机器人的导盲方法,其特征在于,所述判断所述电子牵引绳是否已经和所述目标盲人脱离接触之后,还包括:若所述电子牵引绳未与所述目标盲人脱离接触,则停止前行并询问所述目标盲人是否继续前行;
根据所述目标盲人的语音指令,停止前行或降低速度继续前行。7.根据权利要求1所述的基于机器人的导盲方法,其特征在于,在所述通过所述电子牵引绳对所述目标盲人进行导盲操作之后,在未到达所述目的地数据对应的目的地之前,包括:当检测到有路障出现时,停止所述导盲机器人对应的导盲操作,并提示所述目标盲人停止前行。8.一种基于机器人的导盲装置,其特征在于,用于导盲机器人通过自带的电子牵引绳牵引目标盲人行走,其包括:第一判断模块,用于当接收到来自所述目标盲人的目标导盲指令时,判断所述目标盲人是否已经握住所述电子牵引绳;第一获取模块,用于当所述目标盲人已经接触到了所述电子牵引绳时,根据所述目标导盲指令对应包含的目的地数据,获取所述目标导盲指令对应的目标路线图;第二获取模块,用于获取所述目标路线图对应路线的当前天气预报数据和所述目标盲人对应的目标身体健康数据;第二判断模块,用于根据所述当前天气预报数据和所述目标身体健康数据,判断所述目标盲人当前是否适合前往所述目的地数据对应的目的地;导盲操作模块,用于当所述目标盲人当前适合前往所述目的地数据对应的目的地时,则通过所述电子牵引绳对所述目标盲人进行导盲操作。9.一种计算机可读存储介质,其特征在于,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如权利要求1~7任一项所述的基于机器人的导盲方法。10.一种计算机设备,其特征在于,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如权利要求1~7任一项所述的基于机器人的导盲方法。
技术总结
本发明实施例公开了一种基于机器人的导盲方法及装置,其中该导盲方法包括:当接收到来自目标盲人的目标导盲指令时,判断目标盲人是否已经握住所述电子牵引绳;若是,则根据目标导盲指令对应包含的目的地数据,获取目标导盲指令对应的目标路线图;获取目标路线图对应路线的当前天气预报数据和目标盲人对应的目标身体健康数据;根据当前天气预报数据和目标身体健康数据,判断目标盲人当前是否适合前往目的地数据对应的目的地;若是,则通过电子牵引绳对目标盲人进行导盲操作。本发明具有准确的室内外导盲作用,还可针对盲人群体的身体健康状况和天气情况进行导盲操作,可以在保证盲人安全的前提下进行导盲操作。人安全的前提下进行导盲操作。人安全的前提下进行导盲操作。
技术研发人员:李蒙 邱梓标 敬浩先 黎元晟 蒋柏辉 庄昊学
受保护的技术使用者:深圳技术大学
技术研发日:2021.08.13
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。