1.本发明涉及一种地面有轨训练装置及训练方法,属于训练装置技术领域。
背景技术:
2.现代的射击技术发展越来越快,执行各种射击任务所处的情况也越来越复杂,需要射击实验室能模拟各种情况,使得训练员在各种情况下均能得到强化锻炼,以保证训练员能轻松自如的面对各种情况,保证射击任务能安全准确完成。现有的大多数实弹射击训练场地的目标靶为固定靶,有一些活动靶也只是左右移动,其模拟练习效果十分有限。
技术实现要素:
3.本发明要解决的技术问题,在于提供一种地面有轨训练装置及训练方法,该训练装置通过轨道及旋转装置可实现靶子立体移动,同时还能自动切换靶子,训练效果好。
4.本发明通过下述方案实现:一种地面有轨训练装置及训练方法,其包括轨道、横杆和靶子,所述轨道设有两根,均固定在地面上,每个所述轨道上均设有一个y轴滑动装置,所述横杆连接在两根所述y轴滑动装置之间,所述横杆上套有一个x轴滑动装置,所述x轴滑动装置上套有多个旋转装置,每个所述旋转装置上均固定连接一个所述靶子。
5.所述y轴滑动装置带动所述横杆在所述轨道上前后移动。
6.所述x轴滑动装置带动多个所述旋转装置在所述横杆上左右移动。
7.所述旋转装置带动对应的所述靶子绕着所述x轴滑动装置进行180度旋转。
8.所述旋转装置和所述靶子的数量相对应,且至少设有3个。
9.所述y轴滑动装置、所述x轴滑动装置和所述旋转装置信号连接到外部的中控装置。
10.一种地面有轨训练方法,其包括以下过程,
11.过程一、训练过程中外部的中控装置通过信号控制y轴滑动装置在所述轨道上前后移动,进而带动横杆在轨道上前后移动,且移动速度可调节;
12.过程二、训练过程中外部的中控装置通过信号控制x轴滑动装置在横杆上左右移动,进而带动多个旋转装置在横杆上左右移动,且移动速度可调节;
13.过程三、训练过程中外部的中控装置通过信号旋转装置带动对应的靶子绕着x轴滑动装置进行180度旋转,中控装置控制多个旋转装置依次旋转;
14.所述过程一、过程二、所述过程三可同时进行。
15.训练前多个所述靶子均位于所述x轴滑动装置的一侧,训练开始时,通过控制旋转装置依次带动所述靶子从0度旋转到90度,然后旋转到180度。
16.训练时,第一个所述靶子从0度旋转到90度,射击后旋转到180度,与此同时,下一个靶子旋转到90度。
17.本发明的有益效果为:
18.1、本发明一种地面有轨训练装置及训练方法通过轨道可实现靶子立体移动,在x
轴和y轴移动,模拟效果好;
19.2、本发明一种地面有轨训练装置及训练方法设有三个靶子,通过旋转装置能自动切换靶子,提高训练效率。
附图说明
20.图1为本发明一种地面有轨训练装置及训练方法的俯视结构示意图。
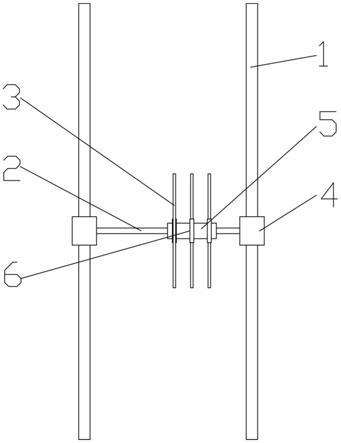
21.图2为本发明一种地面有轨训练装置及训练方法的正视结构示意图。
22.图3为本发明一种地面有轨训练装置及训练方法的靶子与横杆的侧视结构示意图。
23.图中:1为轨道,2为横杆,3为靶子,4为y轴滑动装置,5为x轴滑动装置,6为旋转装置。
具体实施方式
24.下面结合图1
‑
3对本发明进一步说明,但本发明保护范围不局限所述内容。
25.其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向,且附图均采用非常简化的形式且均使用非精准的比率,仅用以方便、明晰地辅助说明本发明实施例的目的。
26.为了清楚,不描述实际实施例的全部特征,在下列描述中,不详细描述公知的功能和结构,因为它们会使本发明由于不必要的细节而混乱,应当认为在任何实际实施例的开发中,必须做出大量实施细节以实现开发者的特定目标,例如按照有关系统或有关商业的限制,由一个实施例改变为另一个实施例,另外,应当认为这种开发工作可能是复杂和耗费时间的,但是对于本领域技术人员来说仅仅是常规工作。
27.一种地面有轨训练装置及训练方法,其包括轨道1、横杆2和靶子3,轨道1设有两根,均固定在地面上,每个轨道1上均设有一个y轴滑动装置4,横杆2连接在两根y轴滑动装置4之间,横杆2上套有一个x轴滑动装置5,x轴滑动装置5上套有多个旋转装置6,每个旋转装置6上均固定连接一个靶子3。
28.y轴滑动装置4带动横杆2在轨道1上前后移动。
29.x轴滑动装置5带动多个旋转装置6在横杆2上左右移动。
30.旋转装置6带动对应的靶子3绕着x轴滑动装置5进行180度旋转。
31.旋转装置6和靶子3的数量相对应,且至少设有3个。
32.y轴滑动装置4、x轴滑动装置5和旋转装置6信号连接到外部的中控装置。
33.一种地面有轨训练方法,其包括以下过程,
34.过程一、训练过程中外部的中控装置通过信号控制y轴滑动装置4在轨道1上前后移动,进而带动横杆2在轨道1上前后移动,且移动速度可调节;
35.过程二、训练过程中外部的中控装置通过信号控制x轴滑动装置5在横杆2上左右移动,进而带动多个旋转装置6在横杆2上左右移动,且移动速度可调节;
36.过程三、训练过程中外部的中控装置通过信号旋转装置6带动对应的靶子3绕着x轴滑动装置5进行180度旋转,中控装置控制多个旋转装置6依次旋转;
37.过程一、过程二、过程三可同时进行。
38.训练前多个靶子3均位于x轴滑动装置5的一侧,训练开始时,通过控制旋转装置6依次带动靶子3从0度旋转到90度,然后旋转到180度。
39.训练时,第一个靶子3从0度旋转到90度,射击后旋转到180度,与此同时,下一个靶子3旋转到90度。
40.尽管已经对本发明的技术方案做了较为详细的阐述和列举,应当理解,对于本领域技术人员来说,对上述实施例做出修改或者采用等同的替代方案,这对本领域的技术人员而言是显而易见,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
技术特征:
1.一种地面有轨训练装置及训练方法,其特征在于:其包括轨道(1)、横杆(2)和靶子(3),所述轨道(1)设有两根,均固定在地面上,每个所述轨道(1)上均设有一个y轴滑动装置(4),所述横杆(2)连接在两根所述y轴滑动装置(4)之间,所述横杆(2)上套有一个x轴滑动装置(5),所述x轴滑动装置(5)上套有多个旋转装置(6),每个所述旋转装置(6)上均固定连接一个所述靶子(3)。2.根据权利要求1所述的一种地面有轨训练装置,其特征在于:所述y轴滑动装置(4)带动所述横杆(2)在所述轨道(1)上前后移动。3.根据权利要求1所述的一种地面有轨训练装置,其特征在于:所述x轴滑动装置(5)带动多个所述旋转装置(6)在所述横杆(2)上左右移动。4.根据权利要求1所述的一种地面有轨训练装置,其特征在于:所述旋转装置(6)带动对应的所述靶子(3)绕着所述x轴滑动装置(5)进行180度旋转。5.根据权利要求1所述的一种地面有轨训练装置,其特征在于:所述旋转装置(6)和所述靶子(3)的数量相对应,且至少设有3个。6.根据权利要求1所述的一种地面有轨训练装置,其特征在于:所述y轴滑动装置(4)、所述x轴滑动装置(5)和所述旋转装置(6)信号连接到外部的中控装置。7.一种地面有轨训练方法,其特征在于:其包括以下过程,过程一、训练过程中外部的中控装置通过信号控制y轴滑动装置(4)在所述轨道(1)上前后移动,进而带动横杆(2)在轨道(1)上前后移动,且移动速度可调节;过程二、训练过程中外部的中控装置通过信号控制x轴滑动装置(5)在横杆(2)上左右移动,进而带动多个旋转装置(6)在横杆(2)上左右移动,且移动速度可调节;过程三、训练过程中外部的中控装置通过信号旋转装置(6)带动对应的靶子(3)绕着x轴滑动装置(5)进行180度旋转,中控装置控制多个旋转装置(6)依次旋转。8.根据权利要求7所述的一种地面有轨训练方法,其特征在于:所述过程一、过程二、所述过程三可同时进行。9.根据权利要求7所述的一种地面有轨训练方法,其特征在于:训练前多个所述靶子(3)均位于所述x轴滑动装置(5)的一侧,训练开始时,通过控制旋转装置(6)依次带动所述靶子(3)从0度旋转到90度,然后旋转到180度。10.根据权利要求7所述的一种地面有轨训练方法,其特征在于:训练时,第一个所述靶子(3)从0度旋转到90度,射击后旋转到180度,与此同时,下一个靶子(3)旋转到90度。
技术总结
本发明公开了一种地面有轨训练装置及训练方法,其包括轨道、横杆和靶子,轨道设有两根,均固定在地面上,每个轨道上均设有一个Y轴滑动装置,横杆连接在两根Y轴滑动装置之间,横杆上套有一个X轴滑动装置,X轴滑动装置上套有多个旋转装置,每个旋转装置上均固定连接一个靶子。本发明的有益效果有:可实现靶子立体移动,在X轴和Y轴移动,模拟效果好;设有三个靶子,通过旋转装置能自动切换靶子,提高训练效率。率。率。
技术研发人员:聂林
受保护的技术使用者:江西锐盾智能科技有限公司
技术研发日:2021.08.26
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。