1.本发明涉及智能交通技术领域,具体涉及一种车牌识别一体机及精准识别方法。
背景技术:
2.车辆的车牌号码是车辆的唯一"身份"标识,车牌识别技术可以在车辆不作任何改动的情况下实现汽车"身份"的自动登记及验证,这项技术已经应用于公路收费、停车管理、称重系统、交通诱导、交通执法、公路稽查、车辆调度、车辆检测等各种场合中,传统的车牌识别系统主要包括车牌定位模块、字符分割模块和字符识别模块,其中,车牌定位模块主要用于定位待识别图片中的车牌的位置;字符分割模块用于将对车牌进行分割已得到多个字符图片;字符识别模块用于识别字符图片中的字符。
3.在实际停车场应用中,车牌识别装置存在以下问题,
4.(1)因为现场安装位置与现场因素影响,车牌识别正确率不稳定,在较好的天气和现场环境中,对现有的车牌识别摄像机设备的识别能力进行分析,识别效果较好,但在较差环境下(雷雨天或者夜晚),基本无法保证车牌识别装置的准确性,且夜晚是事故高发时间段,需要对车牌进行严格监控,避免因车牌识别错误导致的事故发生;
5.(2)现有的车牌识别装置对车头进行整体拍摄,再对其中的车牌信息进行提取,提取过程中,部分车辆可能会出现除车牌以外的其他字,提取过程较为复杂且容易出错,识别效果不佳且识别效率较低。
技术实现要素:
6.为此,本发明提供一种车牌识别一体机及精准识别方法,有效的解决了现有技术中的无法保证车牌识别装置的准确性、车头整体拍摄对车牌进行提取的过程较为复杂且容易出错的问题。
7.为解决上述技术问题,本发明具体提供下述技术方案:一种车牌识别一体机,包括车牌识别装置、与所述车牌识别装置通讯连接的车牌信息处理系统、以及与所述车牌信息处理系统控制连接的闸机机构;
8.所述车牌识别装置包括安装于地面的调节槽座机构、分别安装在所述调节槽座机构两端的固定立柱和平移立柱、以及设置在所述固定立柱和所述平移立柱上端的车牌图像采集机构;
9.所述车牌信息处理系统包括车牌信息接收与处理单元、通信单元、主控制器、以及存储单元,所述存储单元的输出端与所述主控制器的输入端电连接,所述主控制器和所述通信单元双向电连接,所述通信单元的输入端和所述车牌信息接收与处理单元的输出端电连接,所述通信单元的输出端和所述车牌识别装置通讯连接;
10.其中,所述固定立柱和所述平移立柱对所述车牌图像采集机构旋转方向和整体高度进行调节,所述调节槽座机构对所述平移立柱的平移位置进行调节;
11.所述车牌信息接收与处理单元用于接收所述车牌图像采集机构采集到的车牌信
息且对车牌信息进行识别,所述通信单元将处理过的信息传输至主控制器中与所述存储单元中的存储数据进行比对处理,所述主控制器根据比对结果向所述通信单元发送指令,所述通信单元将接受到的指令传输至所述闸机机构,所述闸机机构根据接收指令进行报警处理或者放行处理。
12.作为本发明的优选方案,所述固定立柱包括包括固定柱体、设置在所述固定柱体上的第一旋转柱体、以及设置在所述固定柱体内的第一调节舱,所述第一调节舱内设置有第一旋转驱动件和第一升降驱动件;
13.其中所述第一旋转驱动件用于控制所述第一旋转柱体做旋转运动以调节所述车牌图像采集机构的采集方向,所述第一升降驱动件用于控制所述第一旋转柱体做升降运动以调节所述车牌图像采集机构的采集高度。
14.作为本发明的优选方案,所述第一旋转驱动件包括设置在所述第一调节舱内的第一驱动螺纹筒、螺纹连接在所述第一驱动螺纹筒内的第一螺纹连接柱、以及连接在所述第一驱动螺纹筒下端的第一驱动电机,所述第一螺纹连接柱上端与所述第一旋转柱体下端连接;
15.所述第一升降驱动件包括设置在所述固定柱体内的第一限位框、以及设置在所述第一限位框内的第一驱动齿轮,所述第一螺纹连接柱上开设有供所述第一驱动齿轮上齿轮部分嵌入的第一竖直嵌槽,所述第一限位框内开设有供所述第一驱动齿轮卡接的第一卡接槽,所述第一调节舱上端面开设有供所述第一限位框进行平移滑动的第一滑槽,所述第一驱动齿轮上的卡接齿连续分布在所述第一驱动齿轮上的部分外表面,所述第一驱动齿轮侧边连接有第二驱动电机。
16.作为本发明的优选方案,所述平移立柱包括包括平移柱体、设置在所述平移柱体上的第二旋转柱体、以及设置在所述平移柱体内的第二调节舱,所述第二调节舱内设置有第二旋转驱动件和第二升降驱动件;
17.其中所述第二旋转驱动件用于控制所述第二旋转柱体做旋转运动以调节所述车牌图像采集机构的采集方向,所述第二升降驱动件用于控制所述第二旋转柱体做升降运动以调节所述车牌图像采集机构的采集高度。
18.作为本发明的优选方案,所述第二旋转驱动件包括设置在所述第二调节舱内的第二驱动螺纹筒、螺纹连接在所述第二驱动螺纹筒内的第二螺纹连接柱、以及连接在所述第二驱动螺纹筒下端的第三驱动电机,所述第二螺纹连接柱上端与所述第二旋转柱体下端连接;
19.所述第二升降驱动件包括设置在所述平移柱体内的第二限位框、以及设置在所述第二限位框内的第二驱动齿轮,所述第二螺纹连接柱上开设有供所述第二驱动齿轮上齿轮部分嵌入的第二竖直嵌槽,所述第二限位框内开设有供所述第二驱动齿轮卡接的第二卡接槽,所述第二调节舱上端面开设有供所述第二限位框进行平移滑动的第二滑槽,所述第二驱动齿轮上的卡接齿连续分布在所述第二驱动齿轮上的部分外表面,所述第二驱动齿轮侧边连接有第四驱动电机。
20.作为本发明的优选方案,所述调节槽座机构包括嵌设在地面上的固定槽体、设置在所述固定槽体内的连接隔板、以及竖直设置在所述连接隔板下方的封闭隔板,沿所述固定槽体长度方向上设置有调节螺杆,所述调节螺杆贯穿设置在所述封闭隔板上,且所述调
节螺杆一端连接有第五驱动电机,所述调节螺杆上螺纹连接有螺纹连接栓,所述螺纹连接栓上端与所述平移柱体连接,所述连接隔板上开设有供所述螺纹连接栓滑动的平移槽。
21.作为本发明的优选方案,所述车牌图像采集机构包括次控制器、设置在所述第一旋转柱体和所述第二旋转柱体上的车牌识别摄像机、设置在所述固定柱体内的第一限位座结构、设置在所述平移柱体内的第二限位座结构、设置在所述固定槽体侧边上且与所述螺纹连接栓连接的两组触发元件、以及设置在所述平移立柱远离所述固定立柱一侧边的检测元件;
22.其中,所述检测元件对车头车牌与所述车牌识别摄像机之间的最短距离进行测量,所述触发元件用于检测车头和车尾位置信号,并将最短距离信息和位置信息传输至所述次控制器,所述次控制器向所述车牌识别摄像机发送拍摄指令,所述第一限位座结构和所述第二限位座结构分别对所述第一旋转柱体和所述第二旋转柱体的旋转角度进行限位控制。
23.作为本发明的优选方案,所述第一限位座结构包括转动设置在所述固定柱体内的第一固定环座、固定连接在所述第一固定环座内的第一固定槽座、套设在所述第一固定槽座内的第一调节槽座、以及设置在连接在所述固定柱体侧边的第一限位调节舱,所述第一限位调节舱内部与所述固定柱体内部连通,所述第一固定环座外环绕设置有第一主调三角齿,所述第一限位调节舱内设置有与所述第一主调三角齿啮合的第一调节齿轮,所述第一调节槽座外环绕设置有第一次调三角齿,所述第一限位调节舱内设置有与所述第一次调三角齿啮合的第二调节齿轮,所述第一调节齿轮和所述第二调节齿轮上分别连接有第一调节电机和第二调节电机,所述第一调节电机和所述第二调节电机均与所述次控制器通讯连接。
24.作为本发明的优选方案,所述第二限位座结构包括转动设置在所述平移柱体内的第二固定环座、固定连接在所述第二固定环座内的第二固定槽座、套设在所述第二固定槽座内的第二调节槽座、以及设置在连接在所述平移柱体侧边的第二限位调节舱,所述第二限位调节舱内部与所述平移柱体内部连通,所述第二固定环座外环绕设置有第二主调三角齿,所述第二限位调节舱内设置有与所述第二主调三角齿啮合的第三调节齿轮,所述第二调节槽座外环绕设置有第二次调三角齿,所述第二限位调节舱内设置有与所述第二次调三角齿啮合的第四调节齿轮,所述第三调节齿轮和所述第四调节齿轮上分别连接有第三调节电机和第四调节电机,所述第三调节电机和所述第四调节电机均与所述次控制器通讯连接。
25.作为本发明的优选方案,一种车牌识别一体机的精准识别方法包括以下步骤,
26.步骤一,对所述车牌识别摄像机进行限位调节:所述检测元件对车头车牌与所述车牌识别摄像机之间的最短距离进行检测,将数据传输至所述次控制器中,经由次控制器运算将所述第一限位座结构和所述第二限位座结构调整成特定的初始角度和限位空间;
27.步骤二,图像数据采集与传输:所述触发元件对车头车尾的位置进行检查,并将位置信息传输给所述次控制器,所述次控制器向所述车牌识别摄像机发送拍摄指令,所述车牌识别摄像机进行车牌摄像,并将将两次检测到的车牌图像均传输至所述车牌信息接收与处理单元;
28.步骤三,图像初次比对:所述车牌信息接收与处理单元将两组车头车尾车牌图像
信息进行比对,结果一致则发送一项图像数据,结果不一致则发送不同项的图像数据,发送出的数据均发送至所述通信单元;
29.步骤四:图像二次比对:所述通信单元将接收到的图像信息传输至主控制器中,所述存储单元以已存储车牌样本数据作为比对样本与处理过的车牌信息进行比对;
30.步骤五,指令控制与指令实施:图像信息比对均一致情况下,所述主控制器通过所述通信单元向所述闸机机构发送放行指令;图像信息比对不一致情况下通过所述通信单元向所述车牌识别装置发送拍摄指令,重新进行步骤二、步骤三、步骤四,若图像比对结果仍不一致,则通过所述通信单元向所述闸机机构发送报警指令,工作人员根据报警指令对车辆进行人工检查。
31.本发明与现有技术相比较具有如下有益效果:
32.(1)本发明设置车牌识别装置,其中两组触发元件的设置使得车牌识别摄像机对车头车尾的车牌分别进行图像采集,并通过车牌信息接收与处理单元同时进行比对,增加了车牌识别的准确性,一单出现不一致的情况经过重复核实则进行报警,再进行人工核验,保证了停车的安全性,避免因车牌识别错误导致的事故发生;
33.(2)本发明在固定柱体和平移柱体上设置第一限位座结构和第二限位座结构,对车牌识别摄像机的转动空间的初始角度进行调节使车牌识别摄像机正对车牌,且对车牌识别摄像机的转动空间的弧度进行调节使车移动之后车牌识别摄像机仍然正对车牌,减少了车牌信息过滤过程,提高了识别效率且保证了识别效果。
附图说明
34.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
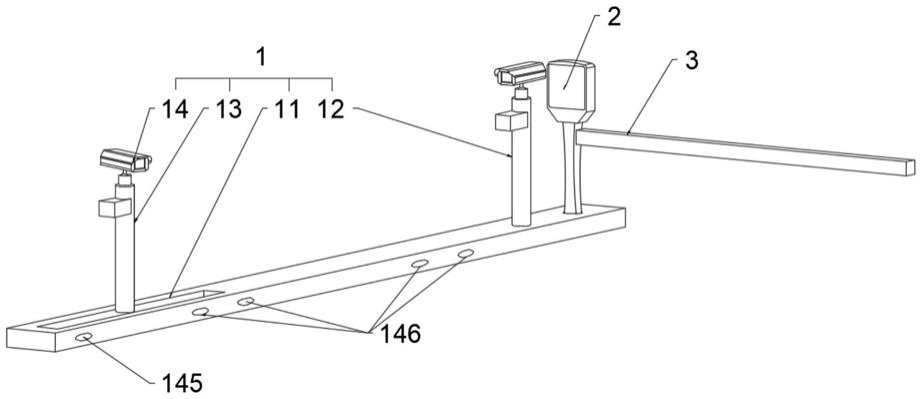
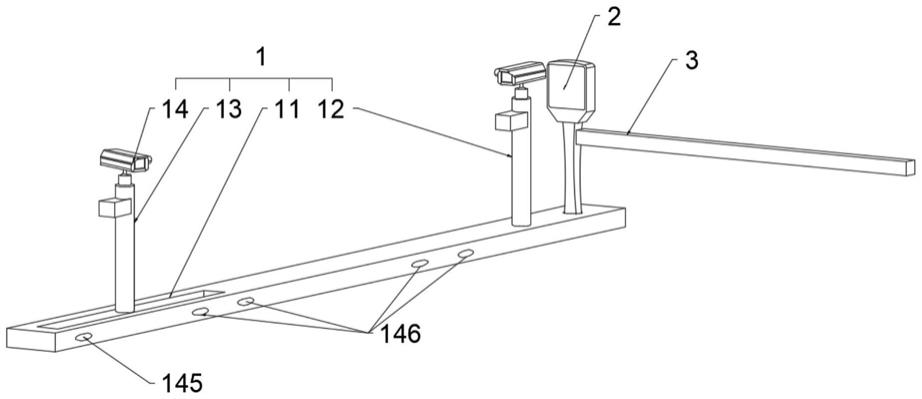
35.图1为本发明实施例提供的一种车牌识别一体机的结构示意图;
36.图2为本发明实施例中的车牌识别装置和车牌信息处理系统的结构示意图;
37.图3为本发明实施例中的固定柱体或平移柱体的结构示意图;
38.图4为本发明实施例中的第一限位座结构和第二限位座结构的结构示意图。
39.图中的标号分别表示如下:
[0040]1‑
车牌识别装置;2
‑
车牌信息处理系统;3
‑
闸机机构;
[0041]
11
‑
调节槽座机构;12
‑
固定立柱;13
‑
平移立柱;14
‑
车牌图像采集机构;
[0042]
21
‑
车牌信息接收与处理单元;22
‑
通信单元;23
‑
主控制器;24
‑
存储单元;
[0043]
111
‑
固定槽体;112
‑
连接隔板;113
‑
封闭隔板;114
‑
调节螺杆;115
‑
第五驱动电机;116
‑
螺纹连接栓;117
‑
平移槽;
[0044]
121
‑
固定柱体;122
‑
第一旋转柱体;123
‑
第一调节舱;124
‑
第一旋转驱动件;125
‑
第一升降驱动件;
[0045]
131
‑
平移柱体;132
‑
第二旋转柱体;133
‑
第二调节舱;134
‑
第二旋转驱动件;135
‑
第二升降驱动件;
[0046]
141
‑
次控制器;142
‑
车牌识别摄像机;143
‑
第一限位座结构;144
‑
第二限位座结
构;145
‑
触发元件;146
‑
检测元件;
[0047]
1241
‑
第一驱动螺纹筒;1242
‑
第一螺纹连接柱;1243
‑
第一驱动电机;
[0048]
1251
‑
第一限位框;1252
‑
第一驱动齿轮;1253
‑
第一竖直嵌槽;1254
‑
第一卡接槽;1255
‑
第一滑槽;
[0049]
1341
‑
第二驱动螺纹筒;1342
‑
第二螺纹连接柱;1343
‑
第三驱动电机;
[0050]
1351
‑
第二限位框;1352
‑
第二驱动齿轮;1353
‑
第二竖直嵌槽;1354
‑
第二卡接槽;1355
‑
第二滑槽;
[0051]
1431
‑
第一固定环座;1432
‑
第一固定槽座;1433
‑
第一调节槽座;1434
‑
第一限位调节舱;1435
‑
第一主调三角齿;1436
‑
第一调节齿轮;1437
‑
第一次调三角齿;1438
‑
第二调节齿轮;
[0052]
1441
‑
第二固定环座;1442
‑
第二固定槽座;1443
‑
第二调节槽座;1444
‑
第二限位调节舱;1445
‑
第二主调三角齿;1446
‑
第三调节齿轮;1447
‑
第二次调三角齿;1448
‑
第四调节齿轮。
具体实施方式
[0053]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0054]
如图1所示,本发明提供了一种车牌识别一体机,包括车牌识别装置1、与车牌识别装置1通讯连接的车牌信息处理系统2、以及与车牌信息处理系统2控制连接的闸机机构3。
[0055]
本发明采用可调控的车牌识别装置1对图像进行采集,并将采集到的图像信息传输至车牌信息处理系统2中,车牌信息处理系统2根据信息对闸机机构3进行控制发出警报或者对车辆放行。
[0056]
其中,闸机机构在本发明中未作具体设计,参考现有技术中的闸机,本发明的闸机机构3额外添加报警器,在图像信息出现问题时发出警报。
[0057]
本发明的主要部分为图像采集部分和图像处理并控制部分,两个部分分工合作对图像进行提取、传输、比对,以下为上述主要部分的具体实施方式。
[0058]
第一部分:图像采集部分,本实施例采用车牌识别装置1对车牌进行采集,对车头部分的图像采集不能完全保证车牌识别的准确性,所以在本实施例中车牌识别装置1主要对前后车牌均进行图像采集。
[0059]
前后分别安装固定立柱12和平移立柱13,为了适应不同长度的车辆,本实施例中的平移立柱13可在调节槽座机构11中移动范围内滑动,而固定立柱12靠近闸机机构3固定设置在调节槽座机构11的端部上,并且在固定立柱12和平移立柱13上均设置车牌图像采集机构14对车牌图像进行采集。
[0060]
本实施例中,固定立柱12和平移立柱13均可对车牌图像采集机构14旋转方向和整体高度进行调节,平移立柱31可以调节位置,并且通过调节槽座机构11对平移立柱13的平移位置进行调节。
[0061]
首先对固定立柱12做以下设计,如图2所示,固定立柱12包括包括固定柱体121、设
置在固定柱体121上的第一旋转柱体122、以及设置在固定柱体121内的第一调节舱123,第一调节舱123内设置有第一旋转驱动件124和第一升降驱动件125。
[0062]
在固定立柱12中,第一旋转柱体122可旋转角度,使车牌图像采集机构14跟随一起转动,在车运行过程中转换角度便于采集到的图像更加准确。
[0063]
其中,主要通过第一旋转驱动件124控制第一旋转柱体122做旋转运动以调节车牌图像采集机构14的采集方向,另外,不同的车辆进行车牌识别,车牌的高度不同,所以本设计采用第一升降驱动件125控制第一旋转柱体122做升降运动以调节车牌图像采集机构14的采集高度。
[0064]
在本实施例中,第一旋转驱动件124选取以下一种优选的实施方案,第一旋转驱动件124包括设置在第一调节舱123内的第一驱动螺纹筒1241、螺纹连接在第一驱动螺纹筒1241内的第一螺纹连接柱1242、以及连接在第一驱动螺纹筒1241下端的第一驱动电机1243,第一螺纹连接柱1242上端与第一旋转柱体122下端连接。
[0065]
第一旋转驱动件124的驱动源为第一驱动电机1243,第一驱动电机1243受车牌图像采集机构14控制,第一驱动电机1243驱动带动第一驱动螺纹筒1241转动从而带动第一螺纹连接柱1242转动,第一螺纹连接柱1242带动第一旋转柱体122转动,从而带动上方的车牌图像采集机构14转动,所以车牌图像采集机构14角度进行改变。
[0066]
另外,我们提供设计第一升降驱动件125控制第一旋转柱体122进行升降,具体设计如下,如图3所示,第一升降驱动件125包括设置在固定柱体121内的第一限位框1251、以及设置在第一限位框1251内的第一驱动齿轮1252,第一螺纹连接柱1242上开设有供第一驱动齿轮1252上齿轮部分嵌入的第一竖直嵌槽1253,第一限位框1251内开设有供第一驱动齿轮1252卡接的第一卡接槽1254,第一调节舱123上端面开设有供第一限位框1251进行平移滑动的第一滑槽1255,第一驱动齿轮1252上的卡接齿连续分布在第一驱动齿轮1252上的部分外表面,第一驱动齿轮1252侧边连接有第二驱动电机(图上未画出)。
[0067]
第二驱动电机与第一驱动电机1243一致,受车牌图像采集机构14控制,当需要进行升降运动的时候,第二驱动电机运行带动第一驱动齿轮1252转动,带动第一限位框1251滑动嵌入第一螺纹连接柱1242内的第一竖直嵌槽1253,对第一螺纹连接柱1242进行限位,此时驱动第一驱动电机1243带动第一驱动螺纹筒1241转动从而带动内部螺纹连接的第一螺纹连接柱1242上下移。
[0068]
作为本实施例的更优选实施例,可以将第一竖直嵌槽1253更换为齿轮槽,将第一限位框1251外设置有齿轮槽卡接的齿轮,可以防止第一竖直嵌槽1253不正对第一限位框1251情况,对第一螺纹连接柱1242进行限位。
[0069]
在本实施例中,第一驱动电机1243作为转动调节角度的电机,可选用步进电机,通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定,另外还作为调节高度的电机,需要通过正反转控制第一螺纹连接柱1242进行升降,采用步进电机,给定工作方式正序换相通电,步进电机正转,按反序通电换相,则电机就反转,第二驱动电机1243可采用普通的转动电机,也可采用步进电机,在第一限位框1251嵌入槽内时,减慢第一驱动齿轮1252的转动速度或者直接调停电机,不需要进行调高之后再启动电机使第一限位框1251复位至初始位置。
[0070]
在本发明中,平移立柱13的设计与固定立柱12的设计原理相同,此处不再赘述,平
移立柱13的具体设计如下:平移立柱13包括包括平移柱体131、设置在平移柱体131上的第二旋转柱体132、以及设置在平移柱体131内的第二调节舱133,第二调节舱133内设置有第二旋转驱动件134和第二升降驱动件135,第二旋转驱动件134用于控制第二旋转柱体132做旋转运动以调节车牌图像采集机构14的采集方向,第二升降驱动件135用于控制第二旋转柱体132做升降运动以调节车牌图像采集机构14的采集高度。
[0071]
第二旋转驱动件134包括设置在第二调节舱133内的第二驱动螺纹筒1341、螺纹连接在第二驱动螺纹筒1341内的第二螺纹连接柱1342、以及连接在第二驱动螺纹筒1341下端的第三驱动电机1343,第二螺纹连接柱1342上端与第二旋转柱体132下端连接。
[0072]
第二升降驱动件135包括设置在平移柱体131内的第二限位框1351、以及设置在第二限位框1351内的第二驱动齿轮1352,第二螺纹连接柱1342上开设有供第二驱动齿轮1352上齿轮部分嵌入的第二竖直嵌槽1353,第二限位框1351内开设有供第二驱动齿轮1352卡接的第二卡接槽1354,第二调节舱133上端面开设有供第二限位框1351进行平移滑动的第二滑槽1355,第二驱动齿轮1352上的卡接齿连续分布在第二驱动齿轮1352上的部分外表面,第二驱动齿轮1352侧边连接有第四驱动电机。
[0073]
本实施例中,平移立柱13和固定立柱12不同的是平移立柱13可进行平移,本发明主要采用调节槽座机构11对平移立柱13进行位置调节,主要滑动介质设置为固定槽体111,固定槽体111安装在地面上,且凸出地面一部分,在固定槽体111内设置连接隔板112,主要对内部的驱动件进行保护,连接隔板112下方竖直设置了封闭隔板113,对内部分驱动件进行进一步的保护,避免雨水进入,导致短路;主要的驱动件就是设置在所述封闭隔板113内的第五驱动电机115,沿固定槽体111长度方向上设置有调节螺杆114,调节螺杆114贯穿设置在封闭隔板113上,第五驱动电机115带动调节螺杆114转动,调节螺杆114上螺纹连接有螺纹连接栓116(为了防止雨水进入生锈,螺纹连接栓116和调节螺杆114均采用不锈钢材料),调节螺杆114转动的时候带动螺纹连接栓116左右移动(仅指图中的左右移动),螺纹连接栓116上端与平移柱体131连接带动平移柱体131平移,连接隔板112上开设有供螺纹连接栓116滑动的平移槽117。
[0074]
雨水通过平移槽117进入连接隔板112内,防止雨水堆积,可将固定槽体111底部打通并与下水道连通,便于将固定槽体111内的雨水排出。
[0075]
另外,本发明中主要采用车牌图像采集机构14对车牌进行图像采集,主要结构包括次控制器141(前面提到的第一驱动电机1243、第二驱动电机、第三驱动电机1243和第四驱动电机均受次控制器控制)、车牌识别摄像机142、第一限位座结构143、第二限位座结构144、触发元件145和检测元件146,上述结构中,车牌识别摄像机142均设置在第一旋转柱体122和第二旋转柱体122上,第一限位座结构143和第二限位座结构144分别设置在固定柱体121内和平移柱体131内,触发元件145具体有两组,设置在固定槽体111侧边上且与螺纹连接栓116连接(跟随螺纹连接栓116的移动而移动)。
[0076]
本实施例中,检测元件146对车头车牌与车牌识别摄像机142之间的最短距离进行测量,触发元件145用于检测车头和车尾位置信号,并将最短距离信息和位置信息传输至次控制器141,次控制器141向车牌识别摄像机142发送拍摄指令,第一限位座结构143和第二限位座结构144分别对第一旋转柱体122和第二旋转柱体132的旋转角度进行限位控制。
[0077]
其中,触发元件145和检测元件146均可采用安装预埋地感线圈、红外传感器等辅
助检测设施。
[0078]
本实施例中的主要设计为第一限位座结构143,第一限位座结构143对第一旋转柱体122的旋转初始位置和旋转角度进行限位,本发明主要采用以下优选的实施例,如图3所示,第一限位座结构143包括转动设置在固定柱体121内的第一固定环座1431、固定连接在第一固定环座1431内的第一固定槽座1432、套设在第一固定槽座1432内的第一调节槽座1433、以及设置在连接在固定柱体121侧边的第一限位调节舱1434,第一限位调节舱1434内部与固定柱体121内部连通,第一固定环座1431外环绕设置有第一主调三角齿1435,第一限位调节舱1434内设置有与第一主调三角齿1435啮合的第一调节齿轮1436,第一调节槽座1433外环绕设置有第一次调三角齿1437,第一限位调节舱1434内设置有与第一次调三角齿1437啮合的第二调节齿轮1438,第一调节齿轮1436和第二调节齿轮1438上分别连接有第一调节电机和第二调节电机(图中未画出),第一调节电机和第二调节电机均与次控制器141通讯连接。
[0079]
作为本实施例的优选方案,可在第一旋转柱体122侧边设置限位板,限位板处于第一固定槽座1432和第一调节槽座1433之间,首先对第一旋转柱体122的初始旋转角度进行调节,第一调节电机(与上述电机一样采用步进电机)带动第一调节齿轮1436转动从而带动第一固定环座1431转动一定角度,则使第一固定槽座1432的侧边的位置发生改变;其次,第二调节电机带动第二调节齿轮1438转动从而带动第一调节槽座1433转动一定角度,使得第一调节槽座1433的侧边发生改变,则第一固定槽座1432和第一调节槽座1433之间的初始转动位置和转动区间角度发生改变,使得车牌识别摄像机142始终垂直对车牌进行摄像(使采集数据更好提取),且适用于不同长度的车辆进行使用。
[0080]
在车牌图像采集机构14中,第一限位座结构143和第二限位座结构144结构原理一致,具体工作原理不再赘述,第二限位座结构144的设计如下:第二限位座结构144包括转动设置在平移柱体131内的第二固定环座1441、固定连接在第二固定环座1441内的第二固定槽座1442、套设在第二固定槽座1442内的第二调节槽座1443、以及设置在连接在平移柱体131侧边的第二限位调节舱1444,第二限位调节舱1444内部与平移柱体131内部连通,第二固定环座1441外环绕设置有第二主调三角齿1445,第二限位调节舱1444内设置有与第二主调三角齿1445啮合的第三调节齿轮1446,第二调节槽座1443外环绕设置有第二次调三角齿1447,第二限位调节舱1444内设置有与第二次调三角齿1447啮合的第四调节齿轮1448,第三调节齿轮1446和第四调节齿轮1448上分别连接有第三调节电机和第四调节电机,第三调节电机和第四调节电机均与次控制器141通讯连接。
[0081]
第二部分:图像处理控制部分:本实施例采用车牌信息处理系统2对车牌图像信息进行提取、传输、比对,对于不合格的车牌进行报警处理,保证了一定的安全性。
[0082]
其中主要部分为车牌信息接收与处理单元21、通信单元22、主控制器23、以及存储单元24,具体连接方式顺序如下:
[0083]
存储单元24的输出端与主控制器23的输入端电连接,主控制器23和通信单元22双向电连接,通信单元22的输入端和车牌信息接收与处理单元21的输出端电连接,通信单元22的输出端和车牌识别装置1通讯连接。
[0084]
在本实施例中,车牌信息接收与处理单元21用于接收车牌图像采集机构14采集到的车牌信息且对车牌信息进行识别,通信单元22将处理过的信息传输至主控制器23中与存
储单元24中的存储数据进行比对处理,主控制器23根据比对结果向通信单元22发送指令,通信单元22将接受到的指令传输至闸机机构3,闸机机构3根据接收指令进行报警处理或者放行处理。
[0085]
另外,还可在主控制器23上设置输入单元和输出单元,输入单元可以设置为数据输入系统(具体可设置在计算机键盘,通过计算机键盘将车辆信息输入存储单元24中),输出单元可设置为显示器,在进行图像采集的同时将图像采集到的结果展现在显示器上,并且将比对结果展现在显示器上,便于人工抽样进行核对。
[0086]
综上,本发明提供的一种车牌识别一体机的精准识别方法,主要包括以下步骤,
[0087]
步骤一,对车牌识别摄像机进行限位调节:检测元件146对车头车牌与车牌识别摄像机142之间的最短距离进行检测,将数据传输至次控制器141中,经由次控制器141运算将第一限位座结构143和第二限位座结构144调整成特定的初始角度和限位空间;
[0088]
步骤二,图像数据采集与传输:触发元件145对车头车尾的位置进行检查,并将位置信息传输给次控制器141,次控制器141向车牌识别摄像机142发送拍摄指令,车牌识别摄像机142进行车牌摄像,并将将两次检测到的车牌图像均传输至车牌信息接收与处理单元21;
[0089]
步骤三,图像初次比对:车牌信息接收与处理单元21将两组车头车尾车牌图像信息进行比对,结果一致则发送一项图像数据,结果不一致则发送不同项的图像数据,发送出的数据均发送至通信单元22;
[0090]
步骤四:图像二次比对:通信单元22将接收到的图像信息传输至主控制器23中,存储单元24以已存储车牌样本数据作为比对样本与处理过的车牌信息进行比对;
[0091]
步骤五,指令控制与指令实施:图像信息比对均一致情况下,主控制器23通过通信单元22向闸机机构3发送放行指令;图像信息比对不一致情况下通过通信单元22向车牌识别装置1发送拍摄指令,重新进行步骤二、步骤三、步骤四,若图像比对结果仍不一致,则通过通信单元22向闸机机构3发送报警指令,工作人员根据报警指令对车辆进行人工检查。
[0092]
以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。