1.本发明涉及运输管理装置、运输管理方法以及运输系统。
背景技术:
2.以往,提出了一种能够执行无人自动驾驶控制的自动驾驶装置,在该无人自动驾驶控制中,按照行驶计划,在驾驶员不在车辆中的状态下使车辆自动行驶。
3.在这样的自动驾驶装置中,公开了以下技术:按照没有驾驶员的情况下的行驶计划,执行无人自动驾驶控制(例如,参照专利文献1)。
4.现有技术文献
5.专利文献
6.专利文献1:日本国特开2018
‑
103858号公报
技术实现要素:
7.发明要解决的问题
8.当前,关于高速公路等收费区间内的无人自动驾驶技术、和支持该无人自动驾驶技术的基础设施技术,有多个方案已被提出,因此能够实现高速公路等收费道路的无人自动行驶化。另一方面,关于一般道路的无人自动行驶化,在安全方面上,与收费道路相比,在实现中尚存较多的问题。
9.近年来,在运输业等中,期望在将无人自动驾驶控制的技术应用于运输车辆,增加在没有驾驶员的状态下车辆进行行驶的无人自动行驶区间的同时,减少由驾驶员驾驶车辆的有人行驶区间,从而降低驾驶员的驾驶负担。
10.然而,运输业等的各网点(或者,出发地点、到达地点)的大部分存在于沿着一般道路的地方。因此,鉴于上述问题,去路(例如,网点1
→
网点2)上的从出发地点至收费道路为止的区间和从收费道路至到达地点为止的区间(称作区间1)、以及回路(例如,网点2
→
网点1)上的从出发地点至收费道路为止的区间和从收费道路至到达地点为止的区间(称作区间2)是有人行驶区间。
11.由此,在实现了上述收费道路的无人自动行驶化的情况下,在运输业等中,可考虑在区间1和区间2进行有人行驶,在收费道路进行无人自动行驶的运输方式。
12.因此,本发明的目的在于,提供在这样的运输方式中制订优选的运输计划的技术。
13.解决问题的方案
14.本发明的一个方式的运输管理装置是对运输方式进行管理的运输管理装置,该运输方式中,将a地点与b地点之间设为第一有人行驶区间,将b地点与c地点之间设为无人自动行驶区间,将c地点与d地点之间设为第二有人行驶区间,来使车辆行驶,从而进行从所述a地点向所述d地点的货物等的运输,该运输管理装置中,预测所述无人自动行驶区间的交通状况,来制订所述车辆的行驶计划,基于所述车辆的行驶计划,制订在所述第一有人行驶区间进行驾驶的第一驾驶员的驾驶计划、以及在所述第二有人行驶区间进行驾驶的第二驾
驶员的驾驶计划。
15.另外,本发明的一个方式的运输管理装置是对运输方式进行管理的运输管理装置,该运输方式中,将a地点与b地点之间设为第一有人行驶区间,将b地点与c地点之间设为无人自动行驶区间,将c地点与d地点之间设为第二有人行驶区间,来使车辆行驶,从而进行从所述a地点向所述d地点的货物等的运输,该运输管理装置中,制订在所述第一有人行驶区间进行驾驶的第一驾驶员的驾驶计划、以及在所述第二有人行驶区间进行驾驶的第二驾驶员的驾驶计划,基于所述第一驾驶员的驾驶计划和所述第二驾驶员的驾驶计划,来制订所述车辆的行驶计划。
16.另外,本发明的一个方式的运输管理方法是对运输方式进行管理的运输管理方法,该运输方式中,将a地点与b地点之间设为第一有人行驶区间,将b地点与c地点之间设为无人自动行驶区间,将c地点与d地点之间设为第二有人行驶区间,来使车辆行驶,从而进行从所述a地点向所述d地点的货物等的运输,该运输管理方法中包括以下步骤:预测所述无人自动行驶区间的交通状况,来制订所述车辆的行驶计划的步骤;以及基于所述车辆的行驶计划,来制订在所述第一有人行驶区间进行驾驶的第一驾驶员的驾驶计划、以及在所述第二有人行驶区间进行驾驶的第二驾驶员的驾驶计划的步骤。
17.另外,本发明的一个方式的运输系统,其制订以下驾驶计划:在无人自动行驶区间即b地点至c地点间行驶的车辆的行驶计划;在a地点与b地点之间进行驾驶的第一驾驶员的驾驶计划;以及在c地点与d地点之间驾驶的第二驾驶员的驾驶计划,基于所制订的所述车辆的行驶计划、所述第一驾驶员的驾驶计划、所述第二驾驶员的驾驶计划,来使所述车辆行驶,从而进行从所述a地点向所述d地点的货物等的运输。
18.发明效果
19.根据本发明,能够提供制订优选的运输计划的技术。
附图说明
20.图1是对本发明的实施方式的运输方式进行说明的图。
21.图2是本发明的实施方式的运输管理系统的系统结构图。
22.图3是表示由运输管理装置管理的从a地点到d地点的运输状况的图。
23.图4是表示由运输管理装置管理的从d地点到a地点的运输状况的图。
24.图5是表示由运输计划制订部进行的运输计划制订处理的流程图。
25.图6是表示运输计划制订处理中的运输计划制订处理1的流程图。
26.图7是表示运输计划制订处理中的运输计划制订处理2的流程图。
27.图8是表示到达预测处理的流程图。
28.图9是表示运输计划制订处理中的运输计划制订处理3的流程图。
具体实施方式
29.下面,参照附图对本发明的实施方式进行详细说明。但是,有时省略不必要的详细说明,例如省略已知事项的详细说明或对实质上相同的结构的重复说明等。
30.此外,以下说明及参照的附图是为了使本领域技术人员理解本发明而提供的,并非用于限定本发明的权利要求。
31.(本发明的实施方式的运输系统)
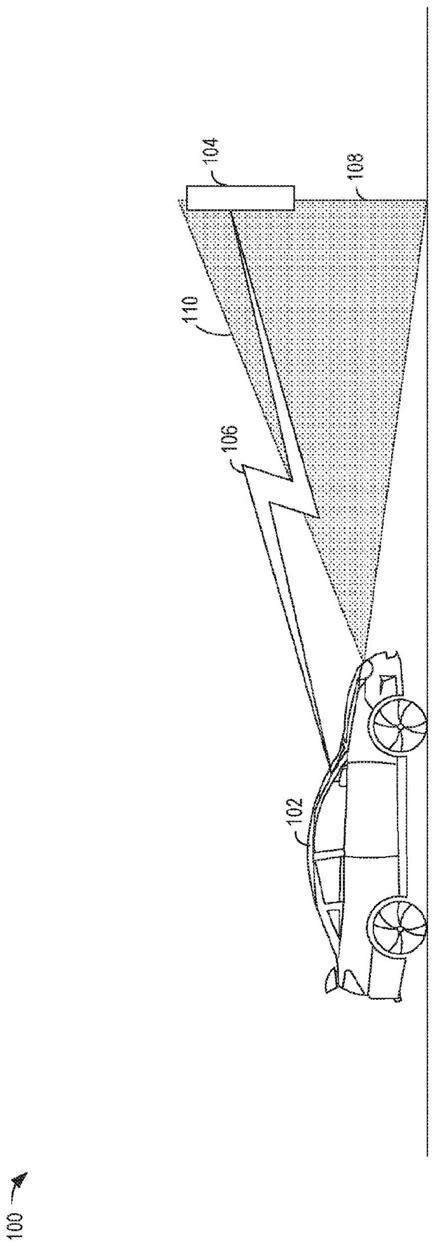
32.首先,使用图1,对本发明的实施方式的运输方式进行说明。
33.本发明的实施方式的运输方式1是从第一出发/到达地点p1将货物(或,人)运输到第二出发/到达地点p4的系统。第一出发/到达地点p1及第一出发/到达地点p4,在运输货物的情况下例如是货物运输网点(装货点、卸货点)等,在运输人的情况下例如是上下车地点等。此外,在本发明的实施方式中,将第一出发/到达地点p1称作“a地点”,将第二出发/到达地点p4称作“d地点”。
34.在第一出发/到达地点p1与第二出发/到达地点p42之间存在第一上下车地点p2、以及第二上下车地点p3。第一上下车地点p2和第二上下车地点p3例如是在高速公路上设置的智能高速公路转换出入口(inter change)(以下,称作“智能ic”)的大型车用停车场。此外,在本发明的实施方式中,将第一上下车地点p2称作“b地点”,将第二上下车地点p3称作“c地点”。
35.车辆x(x01~03)是从a地点向d地点行驶的运输车辆,车辆y(y01~03)是从d地点向a地点行驶的运输车辆。需要说明的是,到达d地点的车辆x(x01~03)成为接下来从d地点向a地点行驶的车辆y(y01~03)。另外,到达a地点的车辆y(y01~03)成为接下来从a地点向d地点行驶的车辆x(x01~03)。
36.从a地点至b地点为止的区间是由第一驾驶员da(da01)进行车辆x(x03)、以及车辆y(y01)的驾驶的第一有人驾驶区间。第一有人驾驶区间例如是从a地点至离a地点最近的高速公路的智能ic为止的一般道路行驶区间。第一驾驶员da(da01)从a地点驾驶车辆x(x03)前往b地点。然后,在b地点换乘车辆y(y01),从b地点驾驶车辆y(y01)返回a地点。因此,第一驾驶员da的驾驶区间仅是第一有人行驶区间。
37.从c地点至d地点为止的区间是由第二驾驶员dd(dd11)进行车辆x(x01)、以及车辆y(y03)的驾驶的第二有人驾驶区间。第二有人驾驶区间例如是从d地点至离d地点最近的高速公路的智能ic为止的一般道路行驶区间。第二驾驶员dd(dd11)从d地点驾驶车辆y(y03)前往c地点。然后,在c地点换乘车辆x(x01),从c地点驾驶车辆x(x01)返回a地点。因此,第二驾驶员dd的驾驶区间仅是第二有人行驶区间。
38.从b地点至c地点为止的区间是在没有驾驶员的状态下车辆x(x01~03)及车辆y(y01~03)进行自动行驶的无人自动行驶区间。在是从b地点前往c地点的车辆x(x01~03)的情况下,无人自动行驶区间例如是从作为b地点的智能ic的大型车用停车场、经由高速公路的上行车道、到作为c地点的智能ic的大型车用停车场为止的高速公路行驶区间。另外,在是从c地点前往b地点的车辆y(y01~03)的情况下,无人自动行驶区间例如是从作为c地点的智能ic的大型车用停车场、经由高速公路的下行车道、到作为b地点的智能ic的大型车用停车场为止的高速公路行驶区间。
39.由此,在通过车辆x从a地点运输货物至d地点的情况下,首先,第一驾驶员da从a地点驾驶车辆x至b地点,在b地点第一驾驶员da从车辆x下车。车辆x从b地点进行无人自动行驶而到达c地点。自c地点起,第二驾驶员dd驾驶车辆x至d地点来运输货物。另外,在通过车辆y来从d地点运输货物至a地点的情况下,首先,第二驾驶员dd从d地点驾驶车辆y至c地点,在c地点第二驾驶员dd从车辆y下车。车辆y从c地点进行无人自动行驶而到达b地点。自b地点起,第一驾驶员da驾驶车辆y至a地点来运输货物。
40.根据以上说明的方法,本发明的实施方式的运输方式1中,从a地点至d地点、以及从d地点至a地点运输货物(或人)。本发明的实施方式的运输管理系统被运用在这样的运输方式1中。
41.(运输管理系统的概要)
42.接着,使用图2对本发明的实施方式的运输管理系统10进行说明。
43.本发明的实施方式的运输管理系统10构成为包括:运输管理装置100、车载系统200、驾驶员终端300。
44.(运输管理装置)
45.运输管理装置100是对从a地点向d地点的货物运输、以及从d地点向a地点的货物运输总括地进行管理的、设置于总部的服务器等。另外,运输管理装置100通过网络400与多个外部服务器(未图示)通信,获取道路交通信息、气象信息等各种信息。运输管理装置100通过网络400以可通信的方式与车载系统200、以及驾驶员终端300连接。另外,运输管理装置100以可通信的方式与设置于a地点的a地点管理装置(未图示)、以及设置于d地点的d地点管理装置(未图示)连接。由此,在a地点或d地点也能够阅览运输管理装置100的信息。此外,也可以将运输管理装置100设置于a地点或d地点。
46.运输管理装置100具备:存储部101、控制部102、通信控制i/f(接口)部103、输入输出i/f(接口)部104。输入输出i/f部104连接着操作部105、显示部106。
47.存储部101中存储有地图信息db(数据库)101a、交通信息db101b、运输计划db101c。
48.地图信息db101a中存储有地图信息。地图信息中,除了道路地图信息以外,还包括:限速信息、道路类别信息、道路宽度信息、车道数信息、隧道信息、高架(步行天桥、立交桥等)信息等各种道路信息。限速信息是表示各道路的各区间的限速的信息。道路类别信息是表示高速公路、县道、市道、辅路等各道路的类别、右转专用车道或左转专用车道的有无、十字路口或转弯点(拐角)的有无、弯道的曲率、道路的倾斜角等的信息。道路宽度信息是表示各道路的宽度的信息。车道数信息是表示道路的车道数的信息。隧道信息是表示隧道的距离、隧道内的高度限制的信息。高架信息是表示步行天桥或立交桥的高度限制的信息。
49.在交通信息db101b中存储有当前的道路交通信息、此后的道路交通预测信息、以及拥堵预测信息。道路交通信息是a地点与b地点间的各一般道路的上下行车道的道路交通信息、c地点与d地点间的各一般道路的上下行车道的道路交通信息、b地点与c地点间的高速公路上行车道的道路交通信息、c地点与b地点间的高速公路下行车道的道路交通信息等。
50.此后的道路交通预测信息是在发生了难以预料的交通事件(超过拥堵预测的范围的拥堵的产生、由事故、车辆故障、灾害等的发生所引起的拥堵或禁止通行等)的情况下预测的此后的道路状况信息。道路交通信息或此后的道路交通预测信息例如从日本道路交通信息中心的服务器定期地(例如,每5分钟)获取,并根据需要来更新。因此,在交通信息db101b中存储有a地点与d地点间的当前的道路交通信息和此后的道路交通预测信息。
51.拥堵预测信息是b地点与c地点间(后述的、b
‑
1a区间、b
‑
2a区间、b
‑
3a区间、b
‑
4a区间、c区间)的高速公路上行车道的、各日期各时段的拥堵预测信息、c地点与b地点间(后述的、b
‑
4b区间、b
‑
3b区间、b
‑
2b区间、b
‑
1b区间、b区间)的高速公路下行车道的、各日期各时
段的拥堵预测信息等。例如从日本道路交通信息中心的服务器定期地(例如,每1小时)获取拥堵预测信息,并根据需要来更新拥堵预测信息。因此,在交通信息db101b中存储有b地点与c地点间的当前的拥堵预测信息。
52.在运输计划db101c中存储有运输计划信息。运输计划信息中包括:车辆x的行驶计划信息、车辆x的行驶计划变更信息、表示车辆x的从b地点到c地点间的行驶路线的行驶路线信息、车辆y的行驶计划信息、车辆y的行驶计划变更信息、表示车辆y的从c地点到b地点间的行驶路线的行驶路线信息、第一驾驶员da的驾驶计划信息、第一驾驶员da的驾驶计划变更信息、第二驾驶员dd的驾驶计划信息、第二驾驶员dd的驾驶计划信息。
53.车辆x的行驶计划信息中包括:a地点出发预定日期及时间信息、b地点停车位置信息、b地点到达预定日期及时间信息、b地点出发预定日期及时间信息、b地点
‑
c地点间行驶速度信息、c地点停车位置信息、c地点到达预定日期及时间信息、c地点出发预定日期及时间信息、d地点到达预定日期及时间信息等。另外,车辆x的运输计划信息中包括:从a地点驾驶该车辆x到b地点的第一驾驶员da的驾驶员信息、从c地点驾驶该车辆x到d地点的第二驾驶员dd的驾驶员信息、对该车辆x的上锁进行解锁的解锁钥信息、将该车辆x上锁的上锁钥信息等。
54.车辆x的行驶计划变更信息中包括:变更后的a地点出发预定日期及时间信息、变更后的b地点停车位置信息、变更后的b地点到达预定日期及时间信息、变更后的b地点出发预定日期及时间信息、变更后的b地点
‑
c地点间行驶速度信息、变更后的c地点停车位置信息、变更后的c地点到达预定日期及时间信息、变更后的c地点出发预定日期及时间信息、变更后的d地点到达预定日期及时间信息、最近智能ic停车位置信息、最近智能ic到达预定信息、最近智能ic出发预定信息、最近智能ic
‑
c地点间行驶速度信息、从a地点驾驶该车辆x到b地点的变更后的第一驾驶员da的驾驶员信息、从c地点驾驶该车辆x到d地点的变更后的第二驾驶员dd的驾驶员信息等。
55.车辆y的行驶计划信息中包括:d地点出发预定日期及时间信息、c地点停车位置信息、c地点到达预定日期及时间信息、c地点出发预定日期及时间信息、c地点
‑
b地点间行驶速度信息、b地点停车位置信息、b地点到达预定日期及时间信息、b地点出发预定日期及时间信息、a地点到达预定日期及时间信息等。而且,车辆y的运输计划信息中包括:从d地点驾驶该车辆y到c地点的第二驾驶员dd的驾驶员信息、从b地点驾驶该车辆y到a地点的第一驾驶员da的驾驶员信息、对该车辆y的上锁进行解锁的解锁钥信息、将该车辆y上锁的上锁钥信息等。
56.车辆y的行驶计划变更信息中包括:变更后的d地点出发预定日期及时间信息、变更后的c地点停车位置信息、变更后的c地点到达预定日期及时间信息、变更后的c地点出发预定日期及时间信息、变更后的c地点
‑
b地点间行驶速度信息、变更后的b地点停车位置信息、变更后的b地点到达预定日期及时间信息、变更后的b地点出发预定日期及时间信息、变更后的a地点到达预定日期及时间信息、最近智能ic停车位置信息、最近智能ic到达预定信息、最近智能ic出发预定信息、最近智能ic
‑
b地点间行驶速度信息、从c地点驾驶该车辆y到d地点的变更后的第二驾驶员dd的驾驶员信息、从b地点驾驶该车辆y到a地点的变更后的第一驾驶员da的驾驶员信息等。
57.第一驾驶员da的驾驶计划信息中包括:对车辆x的上锁进行解锁的解锁钥信息、将
车辆x上锁的上锁钥信息、车辆x的a地点出发预定信息、车辆x的b地点到达预定日期及时间信息、车辆x的b地点停车位置信息、对车辆y的上锁进行解锁的解锁钥信息、将车辆y上锁的上锁钥信息、车辆y的b地点停车位置信息、车辆y的b地点出发预定信息、车辆y的a地点到达预定日期及时间信息等。
58.第一驾驶员da的驾驶计划变更信息中包括:对变更后的车辆x的上锁进行解锁的解锁钥信息、将变更后的车辆x上锁的上锁钥信息、变更后的车辆x的a地点出发预定信息、变更后的车辆x的b地点到达预定日期及时间信息、变更后的车辆x的b地点停车位置信息、对变更后的车辆y的上锁进行解锁的解锁钥信息、将变更后的车辆y上锁的上锁钥信息、变更后的车辆y的b地点停车位置信息、变更后的车辆y的b地点出发预定信息、变更后的车辆y的a地点到达预定日期及时间信息等。
59.第二驾驶员dd的驾驶计划信息中包括:对车辆y的上锁进行解锁的解锁钥信息、将车辆y上锁的上锁钥信息、车辆y的d地点出发预定信息、车辆y的c地点到达预定日期及时间信息、车辆y的c地点停车位置信息、对车辆x的上锁进行解锁的解锁钥信息、将车辆x上锁的上锁钥信息、车辆x的c地点停车位置信息、车辆x的c地点出发预定信息、车辆x的d地点到达预定日期及时间信息等。
60.第二驾驶员dd的驾驶计划变更信息中包括:对变更后的车辆y的上锁进行解锁的解锁钥信息、将变更后的车辆y上锁的上锁钥信息、变更后的车辆y的d地点出发预定信息、变更后的车辆y的c地点到达预定日期及时间信息、变更后的车辆y的c地点停车位置信息、对变更后的车辆x的上锁进行解锁的解锁钥信息、将变更后的车辆x上锁的上锁钥信息、变更后的车辆x的c地点停车位置信息、变更后的车辆x的c地点出发预定信息、变更后的车辆x的d地点到达预定日期及时间信息等。
61.控制部102包括:运输计划制订部102a、运输计划变更部102b、车辆状态管理部102c、货厢状况管理部102d。
62.运输计划制订部102a执行制订产生上述的运输计划信息的运输计划制订处理。关于该运输计划制订处理的细节,将使用图5~9在后面进行说明。
63.运输计划变更部102b执行对由上述的运输计划制订部102a制订产生的运输计划信息进行变更的运输计划变更处理。作为由运输计划变更部102b对运输计划信息进行变更的事例,有以下情况:在车辆x(车辆y)从a地点(d地点)出发前,在b地点
‑
c地点(c地点
‑
b地点)间发生了需进行变更来应对的事件的情况;在车辆x(车辆y)从a地点(d地点)向d地点(a地点)行驶的过程中,在b地点
‑
c地点(c地点
‑
b地点)间发生了需进行变更来应对的事件的情况等。在b地点
‑
c地点(c地点
‑
b地点)间发生了需进行变更来应对的事件的情况下,运输计划变更部102b对车辆x(车辆y)的行驶计划进行变更。变更后的行驶计划作为行驶计划变更信息而存储于运输计划db101c。另外,在b地点
‑
c地点(c地点
‑
b地点)间发生了需进行变更来应对的事件的情况下,运输计划变更部102b对第一驾驶员da(第二驾驶员dd)的驾驶计划进行变更。变更后的驾驶计划作为驾驶计划变更信息而存储于运输计划db101c。
64.车辆状态管理部102c基于从车载系统200发送的车辆状态信息对各车辆x、y的当前的车辆的状态进行管理。另外,车辆状态管理部102c基于从车载系统200发送的车辆状态信息,对车辆的节气门控制、制动控制、转向操舵控制等是否为良好状态进行管理。另外,车辆状态管理部102c基于从车载系统200发送的车辆状态信息,对驱动控制部208是否为良好
状态进行管理。由此,由车辆状态管理部102c管理的项目是车外状况、节气门控制、制动控制、转向操舵控制、驱动控制等项目。作为这些管理的基础的车辆状态信息,是基于由车载系统200的车辆状态识别部209b得出的识别状况而发送的信息。通过接收车辆状态信息,车辆状态管理部102c能够掌握各车辆中的当前的各控制状态是良好状态还是机能不良状态(或者异常状态)。
65.货厢状况管理部102d基于从车载系统200发送的货厢状况信息,对车辆x、y的当前的货厢的状况(货物的装货状态)进行管理。作为该管理的基础的货厢状况信息是基于由车载系统200的车辆状态识别部209b得出的识别状况发送的信息。通过接收货厢状况信息,车辆状态管理部102c能够掌握各车辆中的当前的各货厢是未发生货物散落的良好状态还是可能已发生货物散落的状态(或者已发生了货物散落的状态)。当货厢内没有异常的情况下,车载系统200将表示货厢内没有异常的信息、各摄像图像信息、各加速度传感器的加速度值作为货厢状况信息来发送。另一方面,在识别出货厢内发生了异常、或者存在发生异常的可能性的情况下,将表示货厢内存在异常的信息、表示异常部位的信息、各摄像图像信息、各加速度传感器的加速度值作为货厢状况信息来发送。货厢状况管理部102d通过接收这些货厢状况信息来掌握各车辆的货厢内的状况。
66.通信控制i/f部103是依据lan(局域网,local area network)标准等各种通信标准的单元,作为用于经由通信线路与车载系统200或驾驶员终端300进行数据通信的接口而发挥功能。
67.输入输出i/f部104作为用于向运输管理装置100输入信息、以及从运输管理装置100输出信息的接口而发挥功能。输入输出i/f部104连接着操作部105、显示部106。
68.操作部105是键盘或鼠标等信息输入设备,显示部106是显示器等信息输出设备。
69.(车载系统)
70.车载系统200搭载于车辆x(车辆y)。车载系统200具备:gps(global positioning system,全球定位系统)接收部201、导航部202、地图信息db(数据库)203、行驶计划存储部204、车外状况检测部205、货厢状况检测部206、上锁部207、驱动控制部208、驾驶控制部209、通信控制i/f部210、输入输出i/f部211、操作部212、语音输入输出部213、显示部214。另外,车载系统200中具备用于安装驾驶员终端300的驾驶员终端安装部(未图示)。
71.gps接收部201通过从多个卫星接收信号,并通过测算与卫星的距离来确定车辆x(车辆y)的纬度、经度,从而测定车辆x(车辆y)的位置。而且,将测定出的位置信息发送至驾驶控制部209。
72.导航部202基于由gps接收部201测定出的车辆x(车辆y)的位置和地图信息db203的地图信息,设定从车辆x(车辆y)的当前位置至到达目的地为止的行驶路线。而且,将所设定的行驶路线信息发送至驾驶控制部209。另外,导航部202基于在行驶计划存储部204中存储的行驶计划信息和行驶路线信息,设定车辆x(车辆y)的无人自动行驶区间的行驶路线。而且,将所设定的行驶路线信息发送至驾驶控制部209。
73.地图信息db203中存储有地图信息。地图信息中,除了道路地图信息以外,还包括:限速信息、道路类别信息、道路宽度信息、车道数信息、隧道信息、高架(步行天桥、立交桥等)信息等各种道路信息。限速信息是表示各道路的各区间的限速的信息。道路类别信息是表示高速公路、县道、市道、辅路等各道路的类别、右转专用车道或左转专用车道的有无、十
字路口或转弯点(拐角)的有无、弯道的曲率、道路的倾斜角等的信息。道路宽度信息是表示各道路的宽度的信息。车道数信息是表示道路的车道数的信息。隧道信息是表示隧道的距离、隧道内的高度限制的信息。高架信息是表示步行天桥或立交桥的高度限制的信息。
74.行驶计划存储部204存储有由上述的运输计划制订部102a制订产生的行驶计划信息、以及行驶路线信息。在是车辆x的情况下,所存储的行驶计划信息包括:从a地点驾驶至b地点的第一驾驶员da的驾驶员信息、从c地点驾驶至d地点的第二驾驶员dd的驾驶员信息、对车辆x的上锁进行解锁的解锁钥信息、将车辆x上锁的上锁钥信息、a地点出发预定日期及时间信息、b地点停车预定位置信息、b地点到达预定日期及时间信息、b地点出发预定日期及时间信息、b地点
‑
c地点间行驶速度信息、c地点停车位置信息、c地点到达预定日期及时间信息、c地点出发预定日期及时间信息、d地点到达预定日期及时间信息等。另外,在是车辆y的情况下,所存储的行驶计划信息中包括:从d地点驾驶至c地点的第二驾驶员dd的驾驶员信息、从b地点驾驶至a地点的第一驾驶员da的驾驶员信息、对车辆y的上锁进行解锁的解锁钥信息、将车辆y上锁的上锁钥信息、d地点出发预定日期及时间信息、c地点停车预定位置信息、c地点到达预定日期及时间信息、c地点出发预定日期及时间信息、c地点
‑
b地点间行驶速度信息、b地点停车位置信息、b地点到达预定日期及时间信息、b地点出发预定日期及时间信息、a地点到达预定日期及时间信息等。
75.车外状况检测部205包括摄像装置、传感器等,将表示车辆x(车辆y)的车外状况的信息发送至驾驶控制部209。摄像装置由以下部分构成:对车辆x(车辆y)的前方进行摄像的前方摄像装置、对车辆x(车辆y)的后方进行摄像的后方摄像装置、对车辆x(车辆y)的右侧方进行摄像的右侧方摄像装置、对车辆x(车辆y)的左侧方进行摄像的左侧方摄像装置。各摄像装置将拍摄到的图像信息发送至驾驶控制部209。传感器由以下部分构成:向车辆x(车辆y)的前方照射激光而检测物体或对到对象物为止的距离或方向进行测定的lidar(light detection and ranging,激光雷达)、以及对车辆x(车辆y)周边的角落的障碍物等进行检测的声波传感器(超声波传感器)等。各传感器将测定或检测出的信息发送至驾驶控制部209。
76.货厢状况检测部206包括摄像装置、传感器等,将表示车辆x(车辆y)的货厢内的状况的信息发送至驾驶控制部209。摄像装置由以下部分构成:从前方对货厢内进行摄像的货厢前方摄像装置、从后方对货厢内进行摄像的货厢后方摄像装置。各摄像装置将拍摄到的图像信息发送至驾驶控制部209。传感器包括:对车辆x(车辆y)的前后方向的加速度进行检测的前后方向加速度传感器、对车辆x(车辆y)的左右方向的加速度进行检测的左右方向加速度传感器等。各传感器将检测出的加速度信息发送至驾驶控制部209。
77.上锁部207具备锁机构,进行车辆x(车辆y)的门及货厢的上锁。
78.驱动控制部208执行车辆x(车辆y)的驱动控制。驱动控制部208包括:节气门控制部、制动控制部、转向控制部、车速检测传感器、偏航率传感器等。驱动控制部208根据来自驾驶控制部209的节气门控制信号,通过节气门控制部来执行节气门控制。另外,驱动控制部208根据来自驾驶控制部209的制动控制信号,通过制动控制部来执行制动控制。另外,驱动控制部208根据来自驾驶控制部209的转向控制信号,通过转向控制部来执行转向的操舵控制。车速传感器对车轮的旋转速度进行检测。偏航率传感器对车辆x(车辆y)朝向旋转方向的旋转角的速度进行检测。驱动控制部208将由车速传感器检测出的旋转速度信息和由
偏航率传感器检测出的偏航率信息向ecu(electronic control unit,电子控制单元)10发送。
79.驾驶控制部209包括:当前位置识别部209a、车辆状态识别部209b、行驶状态识别部209c、行驶控制部209d、上锁控制部209e。
80.当前位置识别部209a基于由gps接收部201接收的当前位置信息和地图信息db203中的地图信息,每隔一定间隔(每1秒)识别车辆x(车辆y)的当前位置。而且,将识别到的当前位置信息发送至运输管理装置100。当前位置识别部209a若通过识别当前位置而识别出车辆x(车辆y)从a地点出发了的情况,则将a地点出发日期及时间信息发送至运输管理装置100。另外,当前位置识别部209a若通过识别当前位置而识别出车辆x(车辆y)到达了b地点的情况,则将b地点停车位置信息和b地点到达日期及时间信息发送至运输管理装置100,若识别出车辆x(车辆y)从b地点出发了的情况,则将b地点出发日期及时间信息发送至运输管理装置100。另外,当前位置识别部209a若通过识别当前位置而识别出车辆x(车辆y)到达了c地点的情况,则将c地点停车位置信息和c地点到达日期及时间信息发送至运输管理装置100,若识别出车辆x(车辆y)从c地点出发了的情况,则将c地点出发日期及时间信息发送至运输管理装置100。另外,当前位置识别部209a若通过识别当前位置而识别出车辆x(车辆y)到达了d地点的情况,则将d地点到达日期及时间信息发送至运输管理装置100,若识别出车辆x(车辆y)从d地点出发了的情况,则将d地点出发日期及时间信息发送至运输管理装置100。
81.另外,当前位置识别部209a若通过识别当前位置而识别出车辆x(车辆y)通过了b1地点的情况,则将b1地点通过日期及时间信息发送至运输管理装置100,若识别出车辆x(车辆y)从b2地点出发了的情况,则将b1地点通过日期及时间信息发送至运输管理装置100。另外,当前位置识别部209a若通过识别当前位置而识别出车辆x(车辆y)通过了b3地点的情况,则将b3地点通过日期及时间信息发送至运输管理装置100,若识别出车辆x(车辆y)通过了b4地点的情况,则将b4地点通过日期及时间信息发送至运输管理装置100。
82.车辆状态识别部209b基于从车外状况检测部205发送的信息来识别当前的车外状况,基于从货厢状况检测部206发送的信息来识别当前的货厢状况。另外,车辆状态识别部209b将识别到的车外状况作为车辆状态信息发送至运输管理装置100,将识别到的货厢状况作为货厢状况信息发送至运输管理装置100。车辆状态识别部209b当识别出在车外没有异常的情况下,将表示在车外没有异常的信息作为车辆状态信息发送至运输管理装置100。另一方面,车辆状态识别部209b当识别出在车外发生异常的情况下,将表示在车外发生异常的信息和表示异常部位的信息作为车辆状态信息发送至运输管理装置100。另外,车辆状态识别部209b当识别到在货厢内没有异常的情况下,将表示在货厢内没有异常的信息、各摄像图像信息、各加速度传感器的加速度值作为货厢状况信息发送至运输管理装置100。另一方面,车辆状态识别部209b当识别到在货厢内发生异常、或者存在发生异常的可能性的情况下,将表示在货厢内存在异常的信息、表示异常部位的信息、各摄像图像信息、各加速度传感器的加速度值,作为货厢状况信息发送至运输管理装置100。
83.另外,车辆状态识别部209b识别由驱动控制部208进行的车辆x(车辆y)的驱动控制的状态是良好状态还是机能不良状态(或者、异常状态)。车辆状态识别部209b判别与来自驾驶控制部209的节气门控制信号相应的节气门控制(加減速性能)是否是符合所设定的
内容的控制。另外,车辆状态识别部209b判别与来自驾驶控制部209的制动控制信号相应的制动控制(制动的程度)是否是符合所设定的内容的控制。另外,车辆状态识别部209b判别与来自驾驶控制部209的转向控制信号相应的转向的操舵控制(与转向控制信号相应的旋转角)是否是符合所设定的内容的控制。另外,车辆状态识别部209b判别是否从驱动控制部208等产生异响。车辆状态识别部209b在根据这些判别结果而识别到由驱动控制部208进行的车辆x(车辆y)的驱动控制的状态为良好状态的情况下,将表示是良好状态的信息和各控制的控制值作为车辆状态信息发送至运输管理装置100。另一方面,车辆状态识别部209b在根据这些判别结果而识别到由驱动控制部208进行的车辆x(车辆y)的驱动控制的状态为机能不良状态(或者异常状态)的情况下,将表示存在机能不良状态(或者异常状态)的部位的信息、以及各控制的控制值作为车辆状态信息发送至运输管理装置100。
84.行驶状态识别部209c基于从驱动控制部208接收到的旋转速度信息和偏航率信息,识别车辆x(车辆y)的行驶速度和朝向。
85.行驶控制部209d基于由当前位置识别部209a得出的对车辆x(车辆y)的当前位置的识别结果,在有人行驶控制和无人自动驾驶控制之间进行切换而执行控制。在有人行驶控制中,通过将与驾驶员进行的驾驶操作相应的行驶控制信号输出至驱动控制部208来执行行驶控制。在无人自动驾驶控制中,通过将与在行驶计划存储部204中存储的行驶计划信息和行驶路线信息相应的行驶控制信号输出至驱动控制部208,来执行无人自动行驶区间的自动行驶控制。
86.上锁控制部209e对上锁部207输出使锁机构上锁的上锁信号、以及对锁机构的上锁进行解锁的解锁信号。上锁控制部209e将从驾驶员终端300发送的解锁钥信息与登记于上锁控制部209e的解锁钥信息进行对照,在对照一致的情况下,对上锁部207输出解锁信号。另一方面,上锁控制部209e在驾驶员终端300从车辆x(车辆y)离开规定距离(例如,5m)的情况下,或在从驾驶员终端300接收到上锁要求信号的情况下,对上锁部207输出上锁信号。
87.通信控制i/f部210作为用于经由通信线路与运输管理装置100或驾驶员终端300进行数据通信的接口而发挥功能。
88.输入输出i/f部211作为用于向驾驶控制部209输入信息、以及从驾驶控制部209输出信息的接口而发挥功能。输入输出i/f部211连接着操作部212、语音输入输出部213、显示部214。
89.操作部212是包含键盘、触摸面板的触摸屏等信息输入设备,语音输入输出部213是由扬声器和麦克风构成的信息输入输出设备,显示部214是显示器等的信息输出设备。
90.(驾驶员终端)
91.驾驶员终端300是第一驾驶员da(第二驾驶员dd)持有的终端。此外,在驾驶车辆x(车辆y)的过程中,驾驶员终端300安装于在车载系统200中设置的驾驶员终端安装部(未图示)上。驾驶员终端300除了通常所说的便携式电话的功能以外,还具备:gps接收部301、钥信息存储部302、驾驶计划存储部303、终端控制部304、通信控制i/f部305、输入输出i/f部306、操作部307、语音输入输出部308、显示部309。
92.gps接收部301通过从多个卫星接收信号,并通过测算距卫星的距离来确定驾驶员终端300的纬度、经度,从而测定驾驶员终端300的位置。而且,将测定出的位置信息发送至
终端控制部304。
93.在钥信息存储部302中存储有:从运输管理装置100发送的对车辆x的上锁进行解锁的解锁钥信息、将车辆x上锁的上锁钥信息、对车辆y的上锁进行解锁的解锁钥信息、将车辆y上锁的上锁钥信息。此外,在钥信息存储部302中存储的各个钥信息的删除以如下方式进行:若终端控制部304接收到来自运输管理装置100的删除指示信息,则由终端控制部304从钥信息存储部302中将各个钥信息删除。
94.驾驶计划存储部303存储有由上述的运输计划制订部102a制订产生的驾驶计划信息。在是第一驾驶员da的情况下,所存储的驾驶计划信息中包括:车辆x的车辆号码、车辆x的a地点出发预定日期及时间信息、车辆x的b地点停车位置信息、车辆x的b地点到达预定日期及时间信息、车辆y的车辆号码、车辆y的b地点停车位置信息、车辆y的b地点出发预定日期及时间信息、车辆y的a地点到达预定日期及时间信息等。另外,在是第二驾驶员dd的情况下,所存储的驾驶计划信息中包括:车辆y的车辆号码、车辆y的d地点出发预定日期及时间信息、车辆y的c地点停车位置信息、车辆y的c地点到达预定日期及时间信息、车辆x的车辆号码、车辆x的c地点停车位置信息、车辆x的c地点出发预定日期及时间信息、车辆x的d地点到达预定日期及时间信息等。
95.终端控制部304包括:上锁/解锁指示部304a、驾驶计划执行部304b。
96.上锁/解锁指示部304a根据第一驾驶员da(第二驾驶员dd)的操作,将在钥信息存储部302中存储的车辆x的解锁钥信息或车辆x的上锁钥信息发送至车辆x的车载系统200,从而对车载系统200的驾驶控制部209指示车辆x的解锁、上锁。另外,上锁/解锁指示部304a根据第一驾驶员da(第二驾驶员dd)的操作,将在钥信息存储部302中存储的车辆y的解锁钥信息或车辆y的上锁钥信息发送至车辆y的车载系统200,从而对车载系统200的驾驶控制部209指示车辆y的解锁、上锁。
97.驾驶计划执行部304b基于在驾驶计划存储部303中存储的驾驶计划信息和由gps接收部301接收的驾驶员终端300的位置信息,使显示部309显示第一驾驶员da(第二驾驶员dd)应执行的行动。
98.第一驾驶员da持有的驾驶员终端300中例如以如下方式进行显示。在第一驾驶员da位于a地点的情况下,使显示部309中显示车辆x的车辆号码、车辆x的a地点出发预定日期及时间信息。另外,在第一驾驶员da从a地点驾驶车辆x前往b地点的情况下,使显示部309中显示车辆x的b地点停车位置信息、车辆x的b地点到达预定日期及时间信息。另外,在第一驾驶员da到达b地点且接下来有驾驶车辆y的预定的情况下,使显示部309中显示车辆y的车辆号码、车辆y的b地点停车位置信息、车辆y的b地点到达预定日期及时间信息、车辆y的b地点出发预定日期及时间信息。另一方面,在第一驾驶员da到达b地点且接下来没有驾驶车辆y的预定的情况下,使显示部309中显示返回a地点的方法。另外,在第一驾驶员da从b地点驾驶车辆y前往a地点的情况下,使显示部309中显示车辆y的a地点到达预定日期及时间信息。
99.另外,第二驾驶员dd持有的驾驶员终端300中例如以如下方式进行显示。在第二驾驶员dd位于d地点的情况下,使显示部309中显示车辆y的车辆号码、车辆y的d地点出发预定日期及时间信息。另外,在第二驾驶员dd从d地点驾驶车辆y前往c地点的情况下,使显示部309中显示车辆y的c地点停车位置信息、车辆y的c地点到达预定日期及时间信息。另外,在第二驾驶员dd到达c地点且接下来存在驾驶车辆x的预定的情况下,使显示部309中显示车
辆x的车辆号码、车辆x的c地点停车位置信息、车辆x的c地点到达预定日期及时间信息、车辆x的c地点出发预定日期及时间信息。另一方面,在第二驾驶员dd到达c地点且接下来没有驾驶车辆x的预定的情况下,使显示部309中显示返回d地点的方法。另外,在第二驾驶员dd从c地点驾驶车辆x前往d地点的情况下,使显示部309中显示车辆x的d地点到达预定日期及时间信息。
100.通信控制i/f部305作为用于经由通信线路与运输管理装置100或车载系统200进行数据通信的接口而发挥功能。
101.输入输出i/f部306作为用于向终端控制部304输入信息、以及从终端控制部304输出信息的接口而发挥功能。输入输出i/f部306连接着操作部307、语音输入输出部308、显示部309。
102.操作部307是包含键盘、触摸面板的触摸屏等的信息输入设备,语音输入输出部308是由扬声器和麦克风构成的信息输入输出设备,显示部309是显示器等的信息输出设备。
103.(车辆x的运输状况)
104.接着,使用图3对由运输管理装置100管理的各车辆x的运输状况进行说明。
105.图3是在运输管理装置100的显示部106中显示的第一运输状况管理画面500。操作者可以参照该第一运输状况管理画面500,来确认从a地点向d地点行驶的各车辆x的行驶历史记录、以及当前的状况。
106.在a地点信息显示部501中显示a地点的信息。在b地点信息显示部502中显示b地点的信息。此外,b地点是高速公路的智能ic,所以对该智能ic的拥挤状况进行显示。在拥挤状况的显示中,
“○”
表示无拥挤,“δ”表示稍微拥挤,
“×”
表示拥挤。
107.在b
‑
c间交通状况显示部503中显示从b地点到c地点之间的各通过地点处的当前的交通状况。在此,通过地点例如是在从b地点到c地点之间存在的高速公路转换出入口、停车场、服务区等。“b
‑
1a”表示b地点至b1地点之间,“b
‑
2a”区间表示b1地点至b2地点之间,“b
‑
3a”区间表示b2地点至b3地点之间,“b
‑
4a”区间表示b3地点至b4地点之间,“c”区间表示b4地点至c地点之间。交通状况的显示中,
“○”
表示没有拥堵/拥挤,“δ”表示小于5km的拥堵,
“▲”
表示5km以上的拥堵,
“×”
表示发生事故。
108.在c地点信息显示部504中显示c地点的信息。此外,c地点是高速公路的智能ic,所以对该智能ic的拥挤状况进行显示。拥挤状况的显示中,
“○”
表示无拥挤,“δ”表示稍微拥挤,
“×”
表示拥挤。在d地点信息显示部505中显示d地点的信息。d地点
→
a地点切换显示部506是为了将显示切换为第二运输状况管理画面600,通过操作者的鼠标操作而被点击的按钮。
109.510是车辆x01的运输状况显示部。在第一驾驶员信息显示部510a中显示从a地点驾驶车辆x01至b地点的第一驾驶员da的驾驶员信息。
110.在a地点出发信息显示部510b中显示车辆x01的a地点出发预定日期及时间、车辆x01的a地点出发日期及时间。车辆x01的a地点出发预定日期及时间是基于在行驶计划存储部204中存储的车辆x01的行驶计划信息而显示的日期及时间。另外,运输管理装置100接收到从车辆x01的车载系统200发送的a地点出发日期及时间信息,从而车辆x01的a地点出发日期及时间被显示。
111.在b地点到达/出发信息显示部510c中显示车辆x01的b地点停车预定位置、车辆x01的b地点停车位置、车辆x01的b地点到达预定日期及时间、车辆x01的b地点到达日期及时间、车辆x01的b地点出发预定日期及时间、车辆x01的b地点出发日期及时间。车辆x01的b地点停车预定位置、车辆x01的b地点到达预定日期及时间、车辆x01的b地点出发预定日期及时间是基于在行驶计划存储部204中存储的车辆x01的行驶计划信息而显示的日期及时间。另外,运输管理装置100接收到从车辆x01的车载系统200发送的b地点停车位置信息、b地点到达日期及时间信息、b地点出发日期及时间信息,从而车辆x01的b地点停车位置、车辆x01的b地点到达日期及时间、车辆x01的b地点出发日期及时间被显示。
112.在无人自动行驶区间通过状况显示部510d中显示车辆x01的b1地点的通过日期及时间、车辆x01的b2地点的通过日期及时间、车辆x01的b3地点的通过日期及时间、车辆x01的b4地点的通过日期及时间。运输管理装置100接收到从车辆x01的车载系统200发送的各地点的通过日期及时间信息,从而上述通过日期及时间被显示。
113.在c地点到达/出发信息显示部510e中显示车辆x01的c地点停车预定位置、车辆x01的c地点停车位置、车辆x01的c地点到达预定日期及时间、车辆x01的c地点到达日期及时间、车辆x01的c地点出发预定日期及时间、车辆x01的c地点出发日期及时间。车辆x01的c地点停车预定位置、车辆x01的c地点到达预定日期及时间、车辆x01的c地点出发预定日期及时间是基于在行驶计划存储部204中存储的车辆x01的行驶计划信息而显示的日期及时间。另外,运输管理装置100接收到从车辆x01的车载系统200发送的c地点停车位置信息、c地点到达日期及时间信息、c地点出发日期及时间信息,从而车辆x01的c地点停车位置、车辆x01的c地点到达日期及时间、车辆x01的c地点出发日期及时间被显示。
114.在第二驾驶员信息显示部510f中显示从c地点驾驶车辆x01到d地点的第二驾驶员dd的驾驶员信息。
115.在d地点出发信息显示部510g中显示车辆x01的d地点到达预定日期及时间、车辆x01的d地点到达日期及时间。车辆x01的d地点到达预定日期及时间是基于在行驶计划存储部204中存储的车辆x01的行驶计划信息而显示的日期及时间。另外,运输管理装置100接收到从车辆x01的车载系统200发送的d地点到达日期及时间信息,从而车辆x01的d地点到达日期及时间被显示。
116.在状态显示部510h中显示车辆x01的车辆状态、车辆x01的装货状态。车辆状态的显示中,
“○”
表示良好,“δ”表示机能不良,
“×”
表示异常。另外,装货状态的显示中,
“○”
表示没有问题,“δ”表示有散落的可能性,
“×”
表示已经散落。
117.关于车辆x02的运输状况显示部520、车辆x03的运输状况显示部530,也通过与上述的车辆x01的运输状况显示部510相同的方法,在各显示部中显示各信息。
118.此外,第一运输状况管理画面500中的粗框显示部位表示当前日期及时间的各车辆x的行驶的进展。因此,可知车辆x01在12时55分到达了c地点的停车位置c25。另外,可知车辆x02在13时05分通过了b4地点并正向c地点行驶中。另外,可知车辆x03在13时02分到达了b地点的停车位置b11。
119.(车辆y的运输状况)
120.接着,使用图4对由运输管理装置100管理的各车辆y的运输状况进行说明。
121.图4是在运输管理装置100的显示部106中显示的第二运输状况管理画面600。操作
者可以参照该第二运输状况管理画面600,来确认从d地点向a地点行驶的各车辆y的行驶历史记录、以及当前的状况。
122.在d地点信息显示部601中显示d地点的信息。在c地点信息显示部602显示c地点的信息。此外,c地点是高速公路的智能ic,所以对该智能ic的拥挤状况进行显示。拥挤状况的显示中,
“○”
表示无拥挤,“δ”表示稍微拥挤,
“×”
表示拥挤。
123.在c
‑
b间交通状况显示部603中显示从c地点至b地点之间的各通过地点处的当前的交通状况。在此,通过地点例如是在c地点至b地点之间存在的高速公路转换出入口、停车场、服务区等。“b
‑
4b”区间表示c地点至b4地点之间,“b
‑
3b”区间表示b4地点至b3地点之间,“b
‑
2b”区间表示b3地点至b2地点之间,“b
‑
1b”区间表示b2地点至b1地点之间,“b”区间表示b1地点至b地点之间。交通状况的显示中,
“○”
表示没有拥堵/拥挤,“δ”表示小于5km的拥堵,
“▲”
表示5km以上的拥堵,
“×”
表示发生事故。
124.在b地点信息显示部604中显示b地点的信息。此外,b地点是高速公路的智能ic,所以对该智能ic的拥挤状况进行显示。拥挤状况的显示中,
“○”
表示无拥挤,“δ”表示稍微拥挤,
“×”
表示拥挤。在a地点信息显示部605中显示a地点的信息。a地点
→
d地点切换显示部606是为了将显示切换为第一运输状况管理画面500,通过操作者的鼠标操作而被点击的按钮。
125.610是车辆y01的运输状况显示部。在第二驾驶员信息显示部610a中显示从d地点驾驶车辆y01至c地点的第二驾驶员dd的驾驶员信息。
126.在d地点出发信息显示部610b中显示车辆y01的d地点出发预定日期及时间、车辆y01的d地点出发日期及时间。车辆y01的d地点出发预定日期及时间是基于在行驶计划存储部204中存储的车辆y01的行驶计划信息而显示的日期及时间。另外,运输管理装置100接收到从车辆y01的车载系统200发送的d地点出发日期及时间信息,从而车辆y01的d地点出发日期及时间被显示。
127.在c地点到达/出发信息显示部610c中显示车辆y01的c地点停车预定位置、车辆y01的c地点停车位置、车辆y01的c地点到达预定日期及时间、车辆y01的c地点到达日期及时间、车辆y01的c地点出发预定日期及时间、车辆y01的c地点出发日期及时间。车辆y01的c地点停车预定位置、车辆y01的c地点到达预定日期及时间、车辆y01的c地点出发预定日期及时间是基于在行驶计划存储部204中存储的车辆y01的行驶计划信息而显示的日期及时间。另外,运输管理装置100接收到从车辆y01的车载系统200发送的c地点停车位置信息、c地点到达日期及时间信息、c地点出发日期及时间信息,从而车辆y01的c地点停车位置、车辆y01的c地点到达日期及时间、车辆y01的c地点出发日期及时间被显示。
128.在无人自动行驶区间通过状况显示部610d中显示车辆y01的b4地点的通过日期及时间、车辆y01的b3地点的通过日期及时间、车辆y01的b2地点的通过日期及时间、车辆y01的b1地点的通过日期及时间。运输管理装置100接收到从车辆y01的车载系统200发送的各地点的通过日期及时间信息,从而上述通过日期及时间被显示。
129.在b地点到达/出发信息显示部610e中显示车辆y01的b地点停车预定位置、车辆y01的b地点停车位置、车辆y01的b地点到达预定日期及时间、车辆y01的b地点到达日期及时间、车辆y01的b地点出发预定日期及时间、车辆y01的b地点出发日期及时间。车辆y01的b地点停车预定位置、车辆y01的b地点到达预定日期及时间、车辆y01的b地点出发预定日期
及时间是基于在行驶计划存储部204中存储的车辆y01的行驶计划信息而显示的日期及时间。另外,运输管理装置100接收到从车辆y01的车载系统200发送的b地点停车位置信息、b地点到达日期及时间信息、b地点出发日期及时间信息,从而车辆y01的b地点停车位置、车辆y01的b地点到达日期及时间、车辆y01的b地点出发日期及时间被显示。
130.在第一驾驶员信息显示部610f中显示从b地点驾驶车辆y01到a地点的第一驾驶员da的驾驶员信息。
131.在a地点出发信息显示部610g中显示车辆y01的a地点到达预定日期及时间、车辆y01的a地点到达日期及时间。车辆y01的a地点到达预定日期及时间是基于在行驶计划存储部204中存储的车辆y01的行驶计划信息而显示的日期及时间。另外,若运输管理装置100接收到从车辆y01的车载系统200发送的a地点到达日期及时间信息,则车辆y01的a地点到达日期及时间被显示。
132.在状态显示部610h中显示车辆y01的车辆状态、车辆y01的装货状态。车辆状态的显示中,
“○”
表示良好,“δ”表示机能不良,
“×”
表示异常。另外,装货状态的显示中,
“○”
表示没有问题,“δ”表示有散落的可能性,
“×”
表示已经散落。
133.关于车辆y02的运输状况显示部620、车辆y03的运输状况显示部630,也通过与上述的车辆y01的运输状况显示部610相同的方法,在各显示部中显示各信息。
134.此外,第二运输状况管理画面600中的粗框显示部位表示当前日期及时间的各车辆y的行驶的进展。因此,可知车辆y01在13时10分到达了b地点的停车位置b12。另外,可知车辆y02在12时25分通过了b2地点并正向b1地点行驶中。另外,可知车辆y03在13时00分从c地点出发了。
135.(运输计划制订处理)
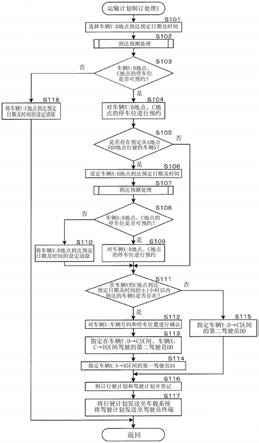
136.接着,使用图5~图9对由运输计划制订部102a执行的运输计划制订处理进行说明。
137.图5是表示由运输计划制订部102a执行的运输计划制订处理的流程图。图6是表示运输计划制订处理中的运输计划制订处理1的流程图。图7是表示运输计划制订处理中的运输计划制订处理2的流程图。图8是表示运输计划制订处理1及运输计划制订处理2中的到达预测处理的流程图。图9是表示运输计划制订处理中的运输计划制订处理3的流程图。
138.首先,运输计划制订部102a在步骤s11中判定是否基于车辆y的b地点到达来制订运输计划。在判定为基于车辆y的b地点到达来制订运输计划的情况下,使处理进行到步骤s12。另一方面,在判定为不基于车辆y的b地点到达来制订运输计划的情况下,使处理进行到步骤s13。
139.在判定为基于车辆y的b地点到达来制订运输计划的情况下,运输计划制订部102a在步骤s12中执行运输计划处理1。
140.在判定为不基于车辆y的b地点到达来制订运输计划的情况下,运输计划制订部102a在步骤s13中判定是否制订与车辆x的c地点到达相配合的运输计划。在判定为制订与车辆x的c地点到达相配合的运输计划的情况下,使处理进行到步骤s14。另一方面,在判定为不制订与车辆x的c地点到达相配合的运输计划的情况下,使处理进行到步骤s15。
141.在判定为不基于车辆x的c地点到达来制订运输计划的情况下,运输计划制订部102a在步骤s15中,判定是否基于各驾驶员da、dd的驾驶计划来制订运输计划。在判定为基
于各驾驶员da、dd的驾驶计划来制订运输计划的情况下,使处理进行到步骤s16。另一方面,在判定为不基于各驾驶员da、dd的驾驶计划来制订运输计划的情况下,结束运输计划制订处理。
142.(运输计划制订处理1)
143.接下来,使用图6对运输计划制订处理1进行说明。
144.首先,在步骤s101中,运输计划制订部102a选择车辆y的b地点到达预定日期及时间。
145.接下来,在步骤s102中,运输计划制订部102a执行到达预测处理。在此,使用图8对到达预测处理进行说明。
146.在步骤s1001中,运输计划制订部102a判定到达预测的对象是否是车辆x。在到达预测的对象是车辆x的情况下,使处理进行到步骤s1002。另一方面,在到达预测的对象不是车辆x的情况下,使处理进行到步骤s1006。
147.接下来,在步骤s1002中,运输计划制订部102a判定是否根据车辆x的c地点到达预定日期及时间来进行预测。在判定为根据车辆x的c地点到达预定日期及时间来进行预测的情况下,使处理进行到步骤s1003。另一方面,在判定为不是根据车辆x的c地点到达预定日期及时间来进行预测的情况下,判定为根据车辆x的b地点到达预定日期及时间来进行预测,并使处理进行到步骤s1004。
148.在判定为根据车辆x的c地点到达预定日期及时间来进行预测的情况下,在步骤s1003中,运输计划制订部102a确认车辆x的c地点到达预定日期及时间。此外,将该“确认车辆x的c地点到达预定日期及时间”的处理设为处理(1)。
149.另一方面,在判定为根据车辆x的b地点到达预定日期及时间来进行预测的情况下,在步骤s1004中,运输计划制订部102a确认车辆x的b地点到达预定日期及时间。此外,将该“确认车辆x的b地点到达预定日期及时间”的处理设为处理(2)。
150.接下来,在于步骤s1003的处理之后执行步骤s1005的处理的情况下,在步骤s1005中,运输计划制订部102a根据车辆x的c地点到达预定日期及时间来进行倒算,确定车辆x在b
‑
c地点间的各区间(b
‑
1a区间、b
‑
2a区间、b
‑
3a区间、b
‑
4a区间、c区间)的通过时段。另一方面,在于步骤s1004的处理之后执行步骤s1005的处理的情况下,在步骤s1005中,运输计划制订部102a根据车辆x的b地点到达预定日期及时间来确定车辆x在b
‑
c地点间的各区间(b
‑
1a区间、b
‑
2a区间、b
‑
3a区间、b
‑
4a区间、c区间)的通过时段。
151.在步骤s1001中,在到达预测的对象不是车辆x的情况下,运输计划制订部102a确定出到达预测的对象是车辆y。然后,在步骤s1006中,运输计划制订部102a判定是否根据车辆y的b地点到达预定日期及时间来进行预测。在判定为根据车辆y的b地点到达预定日期及时间来进行预测的情况下,使处理进行到步骤s1007。另一方面,在判定为不根据车辆y的b地点到达预定日期及时间来进行预测的情况下,判定为根据车辆y的c地点到达预定日期及时间来进行预测,使处理进行到步骤s1008。
152.在判定为根据车辆y的b地点到达预定日期及时间来进行预测的情况下,在步骤s1007中,运输计划制订部102a确认车辆y的b地点到达预定日期及时间。此外,将该“确认车辆y的b地点到达预定日期及时间”的处理设为处理(3)。
153.另一方面,在判定为根据车辆y的c地点到达预定日期及时间来进行预测的情况
下,在步骤s1008中,运输计划制订部102a确认车辆y的c地点到达预定日期及时间。此外,将该“确认车辆y的c地点到达预定日期及时间”的处理设为处理(4)。
154.接下来,在于步骤s1007的处理之后执行步骤s1009的处理的情况下,在步骤s1009中,运输计划制订部102a根据车辆y的b地点到达预定日期及时间来进行倒算,确定车辆y在c
‑
b地点间的各区间(b
‑
4b区间、b
‑
3b区间、b
‑
2b区间、b
‑
1b区间、b区间)的通过时段。另一方面,在于步骤s1008的处理之后执行步骤s1009的处理的情况下,在步骤s1009中,运输计划制订部102a根据车辆y的c地点到达预定日期及时间来确定车辆y在c
‑
b地点间的各区间(b
‑
4b区间、b
‑
3b区间、b
‑
2b区间、b
‑
1b区间、b区间)的通过时段。
155.接下来,在步骤s1010中,运输计划制订部102a参照在交通信息db101b中存储的、各区间的通过时段的拥堵预测信息。在该步骤s1010中,在是车辆x的情况下(执行了上述处理(1)、处理(2)的情况下),运输计划制订部102a参照b地点与c地点间的各区间(b
‑
1a区间、b
‑
2a区间、b
‑
3a区间、b
‑
4a区间、c区间)的通过时段内的拥堵预测信息。另一方面,在该步骤s1010中,在是车辆y的情况下(执行了上述处理(3)、处理(4)的情况下),运输计划制订部102a参照c地点与b地点间的各区间(b
‑
4b区间、b
‑
3b区间、b
‑
2b区间、b
‑
1b区间、b区间)的通过时段内的拥堵预测信息。
156.接下来,在步骤s1011中,运输计划制订部102a判定在所参照的拥堵预测信息中是否存在预测会有拥堵的区间。当判定为在所参照的拥堵预测信息中存在预测会有拥堵的区间的情况下,使处理进行到步骤s1012。另一方面,当判定为在所参照的拥堵预测信息中不存在预测会有拥堵的区间的情况下,使处理进行到步骤s1016。
157.在判定为存在预测会有拥堵的区间的情况下,在步骤s1012中,运输计划制订部102a确认预测会有拥堵的区间的预测拥堵距离和预测通过耗时。
158.接下来,在步骤s1013中,运输计划制订部102a设定将所确认的拥堵预测考虑在内的地点通过日期及时间。在此,例如,对于区间距离为45km,且在没有拥堵的情况下以平均速度75km行驶而能够以30分钟通过该区间的b
‑
1a区间(b地点至b1地点间),假设运输计划制订部102a在该b
‑
1a区间中预测到5km的拥堵,且通过拥堵地段要花费20分钟。在这样的情况下,运输计划制订部102a将从拥堵地段通过所需的时间预估为,20分钟 裕度时间10分钟,合计30分钟,并将该合计作为从拥堵中通过的时间的预估。而且,设为以平均速度75km行驶剩余的40km而预估为32分钟,由此将通过b1地点所需的时间设为62分钟(平均速度43.5km)来设定通过日期及时间。
159.接下来,在步骤s1014中,运输计划制订部102a计算各区间的平均行驶速度。在此,运输计划制订部102a在是车辆x的情况下,计算b地点与c地点间的各区间(b
‑
1a区间、b
‑
2a区间、b
‑
3a区间、b
‑
4a区间、c区间)的平均速度。另外,运输计划制订部102a在是车辆y的情况下,计算c地点与b地点间的各区间(b
‑
4b区间、b
‑
3b区间、b
‑
2b区间、b
‑
1b区间、b区间)的平均速度。
160.接下来,在步骤s1015中,运输计划制订部102a从在步骤s1014中计算出的各区间的平均速度中减去5km,由此进行实际的拥堵距离比预测拥堵距离长等情况下的偏差量的修正。
161.当在步骤s1011中判定为不存在预测会有拥堵的区间的情况下,在步骤s1016中,运输计划制订部102a针对所有区间,设定无拥堵时的地点通过日期及时间。
162.接下来,在步骤s1017中,运输计划制订部102a计算各区间的平均行驶速度。在此,运输计划制订部102a在是车辆x的情况下,计算b地点与c地点间的各区间(b
‑
1a区间、b
‑
2a区间、b
‑
3a区间、b
‑
4a区间、c区间)的平均速度。另外,运输计划制订部102a在是车辆y的情况下,计算c地点与b地点间的各区间(b
‑
4b区间、b
‑
3b区间、b
‑
2b区间、b
‑
1b区间、b区间)的平均速度。
163.接下来,在步骤s1018中,运输计划制订部102a从在步骤s1017中计算出的各区间的平均速度中减去2km,由此进行实际行驶过程中的偏差量(存在拥挤等的情况下)的修正。
164.接下来,在步骤s1019中,运输计划制订部102a制订产生行驶速度控制数据。在此,运输计划制订部102a例如在是车辆x的情况下,计算出b地点与c地点间的b
‑
1a区间的平均速度为75km,b
‑
2a区间的平均速度为78km,b
‑
3a区间的平均速度为78km,b
‑
4a区间的平均速度为78km,c区间的平均速度为73km。此外,也可以不执行步骤s1012至步骤s1015的处理、步骤s1016至步骤s1018的处理。也就是说,在行驶计划的制订阶段中,仅设定到达日期及时间而不设定行驶速度。这样,也可考虑根据到达日期及时间,车辆x(车辆y)通过自身的判断(拥堵的有无或道路状况等)进行速度调整。
165.接下来,在步骤s1020中,运输计划制订部102a在进行了处理(1)(步骤s1003的处理)或处理(4)(步骤s1008的处理)的情况下,计算b地点到达预定日期及时间、b地点出发预定日期及时间。
166.也就是说,基于车辆x的c地点到达预定日期及时间,制订产生b地点
‑
c地点间的速度控制数据,利用所制订产生的速度控制数据来计算车辆x的b地点到达预定日期及时间、车辆x的b地点出发预定日期及时间。此外,车辆x的b地点出发预定日期及时间例如设定为车辆x的b地点到达预定日期及时间的30分钟后的日期及时间。
167.另外,基于车辆y的c地点到达预定日期及时间,制订产生c地点
‑
b地点间的速度控制数据,利用所制订产生的速度控制数据来计算车辆y的b地点到达预定日期及时间、车辆y的b地点出发预定日期及时间。此外,车辆y的b地点出发预定日期及时间例如设定为车辆y的b地点到达预定日期及时间的60分钟后的日期及时间。
168.另外,在步骤s1020中,运输计划制订部102a在进行了处理(2)(步骤s1004的处理)或处理(3)(步骤s1007的处理)的情况下,计算c地点到达预定日期及时间、c地点出发预定日期及时间。
169.也就是说,基于车辆x的b地点到达预定日期及时间,制订产生b地点
‑
c地点间的速度控制数据,利用所制订产生的速度控制数据来计算车辆x的c地点到达预定日期及时间、车辆x的c地点出发预定日期及时间。此外,车辆x的c地点出发预定日期及时间例如设定为车辆x的c地点到达预定日期及时间的60分钟后的日期及时间。
170.另外,基于车辆y的c地点到达预定日期及时间,制订产生c地点
‑
b地点间的速度控制数据,利用所制订产生的速度控制数据来计算车辆y的c地点到达预定日期及时间、车辆y的c地点出发预定日期及时间。此外,车辆y的c地点出发预定日期及时间例如设定为车辆y的c地点到达预定日期及时间的30分钟后的日期及时间。
171.接下来,在步骤s1021中,运输计划制订部102a在进行了处理(1)(步骤s1003的处理)或处理(2)(步骤s1004的处理)的情况下,计算车辆x的a地点出发预定日期及时间、车辆x的c地点出发预定日期及时间、车辆x的d地点到达预定日期及时间。
172.由此,在基于处理(1)(步骤s1003的处理)的情况下,根据所设定的车辆x的c地点到达预定日期及时间来计算车辆x的b地点到达预定日期及时间,根据计算出的车辆x的b地点到达预定日期及时间来计算车辆x的a地点出发预定日期及时间,根据所设定的车辆x的c地点到达预定日期及时间来计算车辆x的c地点出发预定日期及时间,根据计算出的车辆x的c地点出发预定日期及时间来计算车辆x的d地点到达日期及时间。
173.另外,在基于处理(2)(步骤s1004的处理)的情况下,根据所设定的车辆x的b地点到达预定日期及时间来计算车辆x的c地点到达预定日期及时间,根据计算出的车辆x的c地点到达预定日期及时间来计算车辆x的c地点出发预定日期及时间,根据所设定的车辆x的b地点到达预定日期及时间来计算车辆x的a地点出发预定日期及时间,根据计算出的车辆x的c地点出发预定日期及时间来计算车辆x的d地点到达日期及时间。
174.另外,在步骤s1021中,运输计划制订部102a在进行了处理(3)(步骤s1007的处理)或处理(4)(步骤s1008的处理)的情况下,计算车辆y的d地点出发日期及时间、车辆y的b地点出发日期及时间、车辆y的a地点到达预定日期及时间。
175.由此,在基于处理(3)(步骤s1007的处理)的情况下,根据所设定的车辆y的b地点到达预定日期及时间来计算车辆y的c地点到达预定日期及时间,根据计算出的车辆y的c地点到达预定日期及时间来计算车辆y的d地点出发预定日期及时间,根据所设定的车辆y的b地点到达预定日期及时间来计算车辆y的b地点出发预定日期及时间,根据计算出的车辆y的b地点出发预定日期及时间来计算车辆x的a地点到达日期及时间。
176.另外,在基于处理(4)(步骤s1008的处理)的情况下,根据所设定的车辆y的c地点到达预定日期及时间来计算车辆y的b地点到达预定日期及时间,根据计算出的车辆y的b地点到达预定日期及时间来计算车辆y的b地点出发预定日期及时间,根据所设定的车辆y的c地点到达预定日期及时间来计算车辆y的d地点出发预定日期及时间,根据计算出的车辆y的b地点出发预定日期及时间来计算车辆y的a地点到达日期及时间。
177.当在步骤s102执行了到达预测处理的情况下,运输计划制订部102a在步骤s103中判定车辆y的b地点的停车位、以及c地点的停车位是否可预约。通过对各智能ic运营公司的停车场预约网站的预约状况进行确认,来进行各停车位是否可预约的判定。在判定为车辆y的b地点的停车位、以及c地点的停车位可预约的情况下,使处理进行到步骤s104。另一方面,在判定为车辆y的b地点的停车位、以及c地点的停车位不可预约的情况下,使处理进行到步骤s118。
178.在判定为车辆y的b地点的停车位、以及c地点的停车位可预约的情况下,在步骤s104中,运输计划制订部102a对车辆y的b地点的停车位、以及c地点的停车位进行预约。在此,运输计划制订部102a经由各智能ic运营公司的停车场预约网站进行各停车位的预约。此外,在对b地点的停车位进行预约时,在将车辆y的b地点到达预定日期及时间、b地点出发预定日期及时间、拥堵所导致的b地点的到达延迟都考虑在内的基础上,对将裕度时间(例如,b地点出发预定日期及时间 2小时)预估在内的时段进行预约。另外,在对c地点的停车位进行预约时,对将车辆y的c地点到达预定日期及时间、c地点出发预定日期及时间考虑在内的时段进行预约。
179.另一方面,在判定为车辆y的b地点的停车位、以及c地点的停车位不可预约的情况下,在步骤s118中,运输计划制订部102a将车辆y的c地点到达预定日期及时间的设定清除,
结束该运输计划制订处理1。
180.接下来,在步骤s105中,运输计划制订部102a判定是否存在预定从a地点向d地点行驶的车辆x。在判定为存在预定从a地点向d地点行驶的车辆x的情况下,使处理进行到步骤s106。另一方面,在判定为不存在预定从a地点向d地点行驶的车辆x的情况下,使处理进行到步骤s111。
181.接下来,在步骤s106中,运输计划制订部102a设定预定从a地点向d地点行驶的车辆x的b地点到达预定日期及时间。在此,运输计划制订部102a以与车辆y的b地点到达预定日期及时间相配合的方式,设定车辆x的b地点到达预定日期及时间。
182.接下来,在步骤s107中,运输计划制订部102a执行到达预测处理。关于到达预测处理,如以上所述那样执行。
183.接下来,在步骤s108中,运输计划制订部102a判定车辆x的b地点的停车位、以及c地点的停车位是否可预约。通过对各智能ic运营公司的停车场预约网站的预约状况进行确认,来进行各停车位是否可预约的判定。在判定为车辆x的b地点的停车位、以及c地点的停车位可预约的情况下,使处理进行到步骤s109。另一方面,在判定为车辆x的b地点的停车位、以及c地点的停车位不可预约的情况下,使处理进行到步骤s110。
184.在判定为车辆x的b地点的停车位、以及c地点的停车位可预约的情况下,在步骤s109中,运输计划制订部102a对车辆x的b地点的停车位、以及c地点的停车位进行预约。在此,运输计划制订部102a经由各智能ic运营公司的停车场预约网站进行各停车位的预约。此外,在对b地点的停车位进行预约时,对将车辆x的b地点到达预定日期及时间、b地点出发预定日期及时间考虑在内的时段进行预约。另外,在对c地点的停车位进行预约时,在将车辆x的c地点到达预定日期及时间、c地点出发预定日期及时间、拥堵所导致的c地点的到达延迟都考虑在内的基础上,对将裕度时间(例如,c地点出发预定日期及时间 2小时)预估在内的时段进行预约。
185.另一方面,在判定为车辆x的b地点的停车位、以及c地点的停车位不可预约的情况下,在步骤s110中,运输计划制订部102a将车辆x的b地点到达预定日期及时间的设定清除。
186.接下来,在步骤s111中,运输计划制订部102a判定在车辆y的c地点到达预定日期及时间的
±
1小时以内,是否存在预定到达c地点的车辆x。在判定为在车辆y的c地点到达预定日期及时间的
±
1小时以内存在预定到达c地点的车辆x的情况下,使处理进行到步骤s112。另一方面,在判定为在车辆y的c地点到达预定日期及时间的
±
1小时以内,没有预定到达c地点的车辆x的情况下,使处理进行到步骤s115。此外,也可以不执行该步骤s111的处理,而进行步骤s112以后的处理。
187.在判定为在车辆y的c地点到达预定日期及时间的
±
1小时以内,存在预定到达c地点的车辆x的情况下,在步骤s112中,运输计划制订部102a对预定到达的车辆x的车辆号码和c地点的停车位置进行确认。
188.接下来,在步骤s113中,运输计划制订部102a指定从d地点驾驶车辆y到c地点,并驾驶车辆x从c地点返回d地点的第二驾驶员dd。
189.接下来,在步骤s114中,运输计划制订部102a指定从a地点驾驶车辆x到b地点的第一驾驶员da。
190.在判定为在车辆y的c地点到达预定日期及时间的
±
1小时以内,不存在预定到达c
地点的车辆x的情况下,在步骤s115中,运输计划制订部102a指定从d地点驾驶车辆y到c地点的第二驾驶员dd。
191.接下来,在步骤s116中,运输计划制订部102a制订行驶计划和驾驶计划,将所制订的行驶计划和驾驶计划登记于运输计划db101c中。
192.接下来,在步骤s117中,运输计划制订部102a将在运输计划db101c中登记的行驶计划,发送至作为该行驶计划的对象的车辆x的车载系统200和车辆y的车载系统200。另外,运输计划制订部102a将在运输计划db101c中登记的驾驶计划,发送至作为该驾驶计划的对象的第一驾驶员da持有的驾驶员终端300和第二驾驶员dd持有的驾驶员终端300。在执行该步骤s117的处理之后,结束运输计划制订处理1。接收到行驶计划信息的车辆x的车载系统200和车辆y的车载系统200在各自的行驶计划存储部204中存储行驶计划信息。而且,行驶控制部209d按照在行驶计划存储部204中存储的行驶计划信息来使车辆x(车辆y)行驶。接收到驾驶计划信息的驾驶员终端300在驾驶计划存储部303中存储所接收的驾驶计划信息。而且,第一驾驶员da(第二驾驶员dd)按照在驾驶计划存储部303中存储的驾驶计划信息,来驾驶车辆x(车辆y)。
193.(运输计划制订处理2)
194.接下来,使用图7对运输计划制订处理2进行说明。
195.首先,在步骤s201中,运输计划制订部102a选择车辆x的c地点到达预定日期及时间。
196.接下来,在步骤s202中,运输计划制订部102a执行到达预测处理。关于到达预测处理,如以上所述那样执行。
197.当在步骤s202中执行了到达预测处理的情况下,运输计划制订部102a在步骤s203中判定车辆x的b地点的停车位、以及c地点的停车位是否可预约。通过对各智能ic运营公司的停车场预约网站的预约状况进行确认,来进行各停车位是否可预约的判定。在判定为车辆x的b地点的停车位、以及c地点的停车位可预约的情况下,使处理进行到步骤s204。另一方面,在判定为车辆x的b地点的停车位、以及c地点的停车位不可预约的情况下,使处理进行到步骤s218。
198.在判定为车辆x的b地点的停车位、以及c地点的停车位可预约的情况下,在步骤s204中,运输计划制订部102a对车辆x的b地点的停车位、以及c地点的停车位进行预约。在此,运输计划制订部102a经由各智能ic运营公司的停车场预约网站进行各停车位的预约。此外,在对b地点的停车位进行预约时,对将车辆x的b地点到达预定日期及时间、b地点出发预定日期及时间考虑在内的时段进行预约。另外,在对c地点的停车位进行预约时,在将车辆x的c地点到达预定日期及时间、c地点出发预定日期及时间、拥堵所导致的c地点的到达延迟都考虑在内的基础上,对将裕度时间(例如,c地点出发预定日期及时间 2小时)预估在内的时段进行预约。
199.另一方面,在判定为车辆x的b地点的停车位、以及c地点的停车位不可预约的情况下,在步骤s218中,运输计划制订部102a将车辆x的c地点到达预定日期及时间的设定清除,结束该运输计划制订处理1。
200.接下来,在步骤s205中,运输计划制订部102a判定是否存在预定从d地点向a地点行驶的车辆y。在判定为存在预定从d地点向a地点行驶的车辆y的情况下,使处理进行到步
骤s206。另一方面,在判定为不存在预定从d地点向a地点行驶的车辆y的情况下,使处理进行到步骤s211。
201.接下来,在步骤s206中,运输计划制订部102a设定预定从d地点向a地点行驶的车辆y的c地点到达预定日期及时间。在此,运输计划制订部102a以与车辆x的c地点到达预定日期及时间相配合的方式,设定车辆y的c地点到达预定日期及时间。
202.接下来,在步骤s207中,运输计划制订部102a执行到达预测处理。关于到达预测处理,如以上所述那样执行。
203.接下来,在步骤s208中,运输计划制订部102a判定车辆y的b地点的停车位、以及c地点的停车位是否可预约。通过对各智能ic运营公司的停车场预约网站的预约状况进行确认,来进行各停车位是否可预约的判定。在判定为车辆y的b地点的停车位、以及c地点的停车位可预约的情况下,使处理进行到步骤s209。另一方面,在判定为车辆y的b地点的停车位、以及c地点的停车位不可预约的情况下,使处理进行到步骤s210。
204.在判定为车辆y的b地点的停车位、以及c地点的停车位可预约的情况下,在步骤s209中,运输计划制订部102a对车辆y的b地点的停车位、以及c地点的停车位进行预约。在此,运输计划制订部102a经由各智能ic运营公司的停车场预约网站进行各停车位的预约。此外,在对b地点的停车位进行预约时,在将车辆y的b地点到达预定日期及时间、b地点出发预定日期及时间、拥堵所导致的b地点的到达延迟都考虑在内的基础上,对将裕度时间(例如,b地点出发预定日期及时间 2小时)预估在内的时段进行预约。另外,在对c地点的停车位进行预约时,对将车辆y的c地点到达预定日期及时间、c地点出发预定日期及时间考虑在内的时段进行预约。
205.另一方面,在判定为车辆y的b地点的停车位、以及c地点的停车位不可预约的情况下,在步骤s210中,运输计划制订部102a将车辆y的c地点到达预定日期及时间的设定清除。
206.接下来,在步骤s211中,运输计划制订部102a判定在车辆x的b地点到达预定日期及时间的
±
1小时以内,是否存在预定到达b地点的车辆y。在判定为在车辆x的b地点到达预定日期及时间的
±
1小时以内存在预定到达b地点的车辆y的情况下,使处理进行到步骤s212。另一方面,在判定为在车辆x的b地点到达预定日期及时间的
±
1小时以内,没有预定到达b地点的车辆y的情况下,使处理进行到步骤s215。此外,也可以不执行该步骤s211的处理,而进行步骤s212以后的处理。
207.在判定为在车辆x的b地点到达预定日期及时间的
±
1小时以内,存在预定到达b地点的车辆y的情况下,在步骤s212中,运输计划制订部102a对预定到达的车辆的y的车辆号码和b地点的停车位置进行确认。
208.接下来,在步骤s213中,运输计划制订部102a指定从a地点驾驶车辆x到b地点,并驾驶车辆y从b地点返回a地点的第a驾驶员da。
209.接下来,在步骤s214中,运输计划制订部102a指定从d地点驾驶车辆y到c地点的第二驾驶员dd。
210.在判定为在车辆x的b地点到达预定日期及时间的
±
1小时以内,不存在预定到达b地点的车辆y的情况下,在步骤s215中,运输计划制订部102a指定从a地点驾驶车辆x到b地点的第一驾驶员da。
211.接下来,在步骤s216中,运输计划制订部102a制订产生行驶计划信息和驾驶计划
信息,将所制订产生的行驶计划信息和驾驶计划信息登记于运输计划db101c中。
212.接下来,在步骤s217中,运输计划制订部102a将在运输计划db101c中登记的行驶计划信息,发送至作为该行驶计划的对象的车辆x的车载系统200和车辆y的车载系统200。另外,运输计划制订部102a将在运输计划db101c中登记的驾驶计划信息,发送至作为该驾驶计划的对象的第一驾驶员da持有的驾驶员终端300和第二驾驶员dd持有的驾驶员终端300。在执行该步骤s217的处理之后,结束运输计划制订处理2。接收到行驶计划信息的车辆x的车载系统200和车辆y的车载系统200在各自的行驶计划存储部204中存储行驶计划信息。而且,行驶控制部209d按照在行驶计划存储部204中存储的行驶计划信息来使车辆x(车辆y)行驶。接收到驾驶计划信息的驾驶员终端300在驾驶计划存储部303中存储所接收的驾驶计划信息。而且,第一驾驶员da(第二驾驶员dd)按照在驾驶计划存储部303中存储的驾驶计划信息,来驾驶车辆x(车辆y)。
213.(运输计划制订处理3)
214.接下来,使用图9对运输计划制订处理3进行说明。
215.首先,在步骤s701中,运输计划制订部102a确认第一驾驶员da的b地点到达预定日期及时间。在此,运输计划制订部102a对在运输计划db101c中登记的第一驾驶员da的驾驶计划信息进行确认。此外,第一驾驶员da的b地点到达预定日期及时间与车辆x的b地点到达日期及时间相同。
216.接下来,在步骤s702中,运输计划制订部102a确认第二驾驶员dd的c地点到达预定日期及时间。在此,运输计划制订部102a对在运输计划db101c中登记的第二驾驶员dd的驾驶计划信息进行确认。此外,第二驾驶员dd的c地点到达预定日期及时间与车辆y的c地点到达日期及时间相同。
217.接下来,在步骤s703中,运输计划制订部102a判定通过车辆x的法定速度范围内的行驶,车辆x是否能够在c地点到达预定日期及时间到达。在此,运输计划制订部102a计算已确认的第一驾驶员da的b地点到达日期及时间与第二驾驶员dd的c地点到达日期及时间的差分时间。而且,运输计划制订部102a判定在计算出的差分时间内,车辆x是否能够在法定速度范围内从b地点行驶至c地点并在c地点到达预定日期及时间到达。在判定为能够通过车辆x的法定速度范围内的行驶而在c地点到达预定日期及时间到达的情况下,使处理进行到步骤s704。另一方面,在判定为无法通过车辆x的法定速度范围内的行驶而在c地点到达预定日期及时间到达(不以超过限速的速度行驶就来不及)的情况下,结束运输计划制订处理3。
218.接下来,在步骤s704中,运输计划制订部102a判定通过车辆y的法定速度范围内的行驶,车辆y是否能够在b地点到达预定日期及时间到达。在此,运输计划制订部102a计算已确认的第二驾驶员dd的c地点到达日期及时间与第一驾驶员da的b地点到达日期及时间的差分时间。而且,运输计划制订部102a判定在计算出的差分时间内,车辆y是否能够在法定速度范围内从c地点行驶至b地点并在b地点到达预定日期及时间到达。在判定为能够通过车辆y的法定速度范围内的行驶而在b地点到达预定日期及时间到达的情况下,使处理进行到步骤s705。另一方面,在判定为无法通过车辆y的法定速度范围内的行驶而在b地点到达预定日期及时间到达(不以超过限速的速度行驶就来不及)的情况下,结束运输计划制订处理3。
219.接下来,在步骤s705中,运输计划制订部102a判定车辆x和车辆y的b地点的停车位、以及c地点的停车位是否可预约。通过确认各智能ic运营公司的停车场预约网站的预约状况,来进行各停车位是否可预约的判定。在判定为车辆x和车辆y的b地点的停车位、以及c地点的停车位可预约的情况下,使处理进行到步骤s706。另一方面,在判定为车辆x和车辆y这两者、或任意一者的b地点的停车位以及c地点的停车位不可预约的情况下,结束运输计划制订处理。
220.在判定为车辆x和车辆y的b地点的停车位、以及c地点的停车位可预约的情况下,在步骤s706中,运输计划制订部102a对车辆x和车辆y的b地点的停车位、以及c地点的停车位进行预约。在此,运输计划制订部102a经由各智能ic运营公司的停车场预约网站进行各停车位的预约。此外,在对车辆x的b地点的停车位进行预约时,对将车辆x的b地点到达预定日期及时间、车辆x的b地点出发预定日期及时间考虑在内的时段进行预约。另外,在对车辆y的b地点的停车位进行预约时,在将车辆y的b地点到达预定日期及时间、b地点出发预定日期及时间、拥堵所导致的车辆y的b地点的到达延迟都考虑在内的基础上,对将裕度时间(例如,b地点出发预定日期及时间 2小时)预估在内的时段进行预约。此外,当产生车辆y的b地点待机时间的情况下(等待至从第二驾驶员dd的c地点到达日期及时间起经过裕度时间量以上的时间为止的情况下),对将该时间预估在内的时段进行预约。
221.另外,在对车辆y的c地点的停车位进行预约时,对将车辆y的c地点到达预定日期及时间、车辆y的c地点出发预定日期及时间考虑在内的时段进行预约。另外,在对车辆x的c地点的停车位进行预约时,在将车辆x的c地点到达预定日期及时间、c地点出发预定日期及时间、拥堵所导致的车辆x的c地点的到达延迟都考虑在内的基础上,对将裕度时间(例如,c地点出发预定日期及时间 2小时)预估在内的时段进行预约。此外,在产生车辆x的c地点待机时间的情况下(等待至从第一驾驶员da的b地点到达日期及时间起经过裕度时间量以上的时间为止的情况下),对将该时间预估在内的时段进行预约。
222.接下来,在步骤s707中,运输计划制订部102a对车辆x的各区间的平均行驶速度进行计算。在此,运输计划制订部102a计算b地点与c地点间的各区间(b
‑
1a区间、b
‑
2a区间、b
‑
3a区间、b
‑
4a区间、c区间)的平均速度。
223.接下来,在步骤s708中,运输计划制订部102a基于b地点与c地点间的各区间的平均速度,设定车辆x的b地点出发日期及时间、c地点到达日期及时间。
224.接下来,在步骤s709中,运输计划制订部102a计算车辆y的各区间的平均行驶速度。在此,运输计划制订部102a计算c地点与b地点间的各区间(b
‑
4b区间、b
‑
3b区间、b
‑
2b区间、b
‑
1b区间、b区间)的平均速度。
225.接下来,在步骤s710中,运输计划制订部102a基于c地点与b地点间的各区间的平均速度,设定车辆y的c地点出发日期及时间、b地点到达日期及时间。
226.接下来,在步骤s711中,运输计划制订部102a制订产生行驶计划信息,将所制订产生的行驶计划信息登记于运输计划db101c中。
227.接下来,在步骤s217中,运输计划制订部102a将在运输计划db101c中登记的行驶计划信息,发送至作为该行驶计划的对象的车辆x的车载系统200和车辆y的车载系统200。另外,运输计划制订部102a将在运输计划db101c中登记的驾驶计划信息,发送至作为该驾驶计划的对象的第一驾驶员da持有的驾驶员终端300和第二驾驶员dd持有的驾驶员终端
300。在执行该步骤s712的处理之后,结束运输计划制订处理2。接收到行驶计划信息的车辆x的车载系统200和车辆y的车载系统200在各自的行驶计划存储部204中存储行驶计划信息。而且,行驶控制部209d按照在行驶计划存储部204中存储的行驶计划信息来使车辆x(车辆y)行驶。
228.(附记事项)
229.应予说明,在本发明的实施方式中发明了以下所示的结构。
230.(附记1)一种对运输系统进行管理的运输管理装置,该运输系统中,将a地点与b地点之间设为第一有人行驶区间,将b地点与c地点之间设为无人自动行驶区间,将c地点与d地点之间设为第二有人行驶区间,来使车辆行驶,从而进行从上述a地点向上述d地点的货物等的运输、以及从上述d地点向上述a地点的货物等的运输,该运输管理装置中,预测上述无人自动行驶区间的交通状况,制订从上述b地点前往上述c地点的第一车辆的行驶计划、以及从上述c地点前往上述b地点的第二车辆的行驶计划,基于上述第一车辆的行驶计划和上述第二车辆的行驶计划,来制订在上述第一有人行驶区间驾驶的第一驾驶员的驾驶计划,基于上述第一车辆的行驶计划和上述第二车辆的行驶计划,来制订在上述第二有人行驶区间驾驶的第二驾驶员的驾驶计划。
231.(附记2)如附记1所述的运输管理装置,其中,在上述第一车辆的行驶计划的制订中,基于上述第一车辆的上述c地点的到达预定,来决定该第一车辆的上述b地点的到达预定。
232.(附记3)如附记1或附记2所述的运输管理装置,其中,在上述第二车辆的行驶计划的制订中,基于上述第二车辆的上述b地点的到达预定,决定该第二车辆的上述c地点的到达预定。
233.(附记4)如附记1至附记3中任意一个所述的运输管理装置,其中,在上述第一车辆的行驶计划的制订中,基于上述第二车辆的上述b地点的到达预定,来决定上述第一车辆的上述b地点的到达预定。
234.(附记5)如附记1至附记4中的任意一个所述的运输管理装置,其中,在上述第二车辆的行驶计划的制订中,基于上述第一车辆的上述c地点的到达预定,来决定上述第二车辆的上述c地点的到达预定。
235.(附记6)如附记1至附记5中的任意一个所述的运输管理装置,其中,在上述第二车辆的行驶计划的制订中,将上述b地点及上述c地点处的上述第二车辆的停车位的确保状况考虑在内。
236.(附记7)如附记1至附记6中的任意一个所述的运输管理装置,其中,在上述第二车辆的行驶计划的制订中,基于上述第二车辆的上述b地点的到达预定,来决定该第二车辆的上述无人自动行驶区间的行驶速度。
237.(附记8)一种运输管理方法,是对运输系统进行管理的运输管理方法,该运输系统中,将a地点与b地点之间设为第一有人行驶区间,将b地点与c地点之间设为无人自动行驶区间,将c地点与d地点之间设为第二有人行驶区间,来使车辆行驶,从而进行从上述a地点向上述d地点的货物等的运输、以及从上述d地点向上述a地点的货物等的运输,该运输管理方法中包括以下步骤:预测上述无人自动行驶区间的交通状况,制订从上述b地点前往上述c地点的第一车辆的行驶计划、以及从上述c地点前往上述b地点的第二车辆的行驶计划的
步骤;基于上述第一车辆的行驶计划和上述第二车辆的行驶计划,制订在上述第一有人行驶区间驾驶的第一驾驶员的驾驶计划的步骤;以及基于上述第一车辆的行驶计划和上述第二车辆的行驶计划,制订在上述第二有人行驶区间驾驶的第二驾驶员的驾驶计划的步骤。
238.本技术基于在2019年3月29日提交的日本专利申请(特愿2019
‑
068868),其内容在此作为参照而引入。
239.工业实用性
240.根据本发明的运输管理装置、运输管理方法以及运输系统,能够提供在运输系统中制订优选的运输计划的技术,该运输系统中,将a地点与b地点之间设为第一有人行驶区间,将b地点与c地点之间设为无人自动行驶区间,将c地点与d地点之间设为第二有人行驶区间,来使车辆行驶,从而进行从所述a地点向所述d地点的货物等的运输。
241.附图标记说明
242.1 运输方式
243.10 运输管理系统
244.100 运输管理装置
245.101 存储部
246.101a 地图信息db
247.101b 交通信息db
248.101c 运输计划db
249.102 控制部
250.102a 运输计划制订部
251.102b 运输计划变更部
252.102c 车辆状态管理部
253.102d 货厢状况管理部
254.103 通信控制i/f部
255.104 输入输出i/f部
256.105 操作部
257.106 显示部
258.200 车载系统
259.201 gps接收部
260.202 导航部
261.203 地图信息db
262.204 行驶计划存储部
263.205 车外状况检测部
264.206 货厢状况检测部
265.207 上锁部
266.208 驱动控制部
267.209 驾驶控制部
268.210 通信控制i/f部
269.211 输入输出i/f部
270.212 操作部
271.213 语音输入输出部
272.214 显示部
273.300 驾驶员终端
274.301 gps接收部
275.302 钥信息存储部
276.303 驾驶计划存储部
277.304 终端控制部
278.305 通信控制i/f部
279.306 输入输出i/f部
280.307 操作部
281.308 语音输入输出部
282.309 显示部
283.400 网络
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。