一种基于sph的双向波浪中船舶耐波性预报方法
技术领域
1.本发明属于船舶耐波性预报技术领域,具体涉及一种基于sph的双向波浪中船舶耐波性预报方法。
背景技术:
2.目前的船舶耐波性预报方法主要是针对船舶在单向传播的规则波或不规则波中的运动响应进行模拟研究,而对于双向波浪或多向波浪中船舶运动的研究较少。由于实际海洋环境及气象条件的复杂性和多变性,当某一海域范围内出现两种不同方向风的作用时,可在海面上出现大范围的十字交叉状的双向波浪。此外,由于极端的天气模式及地理环境因素,也可导致相邻海域内的风向有很大的差异性。当两种不同方向风生成的波浪或涌浪传播到某一共同海区范围内时,也可相互叠加形成方形的双向波浪。双向海浪对过往船舶的六自由度运动和加速度有很大影响,尤其是当船舶航行至两波峰或波谷的交汇处,此时的船舶航行安全性需要格外加以关注和考虑。
3.迄今,基于势流理论和基于cfd/rans原理的船舶耐波性预报方法已取得了显著进展。然而,势流理论和cfd/rans方法无法模拟恶劣海况下由于船舶砰击上浪而引起的波浪破碎、液体飞溅等强非线性剧烈流动现象。近年来,随着计算机水平及数值计算方法的迅速发展,基于无网格技术的光滑粒子流体动力学(sph)方法被广泛应用于船舶运动预报当中,并能够较好地解决局部流场破碎、液体飞溅等强非线性剧烈流动现象。
技术实现要素:
4.本发明的主要目的在于克服现有技术的缺点与不足,提出一种基于sph的双向波浪中船舶耐波性预报方法,方法采用基于sph算法的开源软件designsphysics进行双向波浪中的船舶运动预报与模拟。
5.为了达到上述目的,本发明采用以下技术方案:
6.一种基于sph的双向波浪中船舶耐波性预报方法,包括以下步骤:
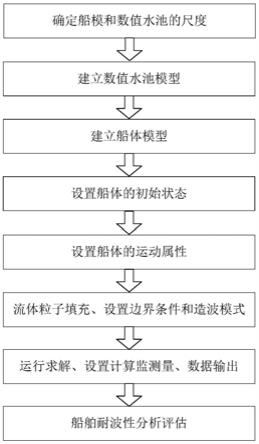
7.s1、确定船模和数值水池的尺度,根据模拟精度需求和计算效率综合确定船模和数值水池的几何尺度;
8.s2、建立数值水池模型,采用三维建模软件建立数值水池模型,数值水池模型包括空间限制域、数值水池域、两块造波板、两块消波岸以及粒子填充域;
9.s3、建立船体模型,创建并导入船体外壳模型;
10.s4、设置船体的初始状态;
11.s5、设置船体的运动特性;
12.s6、流体粒子填充、设置边界条件和造波模式,对粒子填充域进行水粒子填充与生成,设置数值水池域边界面、造波板、消波岸、船模以及粒子填充域的类型和生成模式,设置两块造波板的运动类型和目标双向波浪的属性;
13.s7、程序运行求解、设置计算监测量以及数据输出,确认数值模拟的粒子数目,采
用软件程序进行数值模拟计算,并设置计算监测量及数据输出,对船体运动、船体受力、船体表面压力、波面高程的监测进行设置并输出结果;
14.s8、船舶耐波性分析评估,根据计算结果对船舶在双向波浪中的运动响应和受力进行分析与评估。
15.进一步的,步骤s1具体为:
16.根据模拟精度需求、尺度效应和计算效率,确定船模的几何缩尺比;根据实船参数和几何缩尺比确定船模的各项参数;根据船模尺度和波浪参数,综合折中考虑浅水效应、池壁效应、阻塞效应、波浪传播与反射、粒子数量以及计算效率以确定数值水池的尺度;
17.所述实船参数包括主尺度、几何型线、排水量、重心位置、转动惯量以及航速;
18.确定船模的各项参数采用相似准则,使船模与实船满足几何相似、运动相似以及动力相似条件。
19.进一步的,步骤s3具体为:
20.根据船舶型线图资料建立船舶各站位的横剖线和中纵剖线图;根据典型位置的横剖线和中纵剖线生成曲面,创建船体外壳的三维几何模型;导入船体外壳的三维几何模型,并设置船模缩尺比例。
21.进一步的,步骤s4中,设置船体的初始状态具体包括:
22.设置船体的漂浮状态为可漂浮式;
23.将船模的重心位置设置为坐标原点,通过平移数值水池使船模位于水池中心位置,通过旋转数值水池对船模的航向角进行初始化设置。
24.进一步的,步骤s5中,设置船体的运动特性具体包括:
25.设置船体的质量、重心坐标位置以及绕三个坐标轴的转动惯量;
26.设置船体的三个方向的初始线速度和绕三个坐标轴的初始角速度;
27.设置船体的三个方向的平动自由度和绕三个坐标轴的转动自由度。
28.进一步的,步骤s6具体为:
29.对粒子填充域进行水粒子填充与生成;设置粒子填充域的类型为流体;
30.设置重力加速度、流体密度、粘性类型、粘性系数、模拟时间、步长以及粒子间距;
31.将数值水池域添加到模拟计算中,将数值水池域的6个边界面设置为壁面边界,设置生成模式为空腔六面体的表面;
32.将两块造波板添加到模拟计算中,设置造波板的类型为壁面边界,设置生成模式为实体;
33.将两块消波岸添加到模拟计算中,设置消波岸的类型为壁面边界,设置生成模式为实体;
34.将船模添加到模拟计算中,设置船模的类型为壁面边界,设置生成模式为表面;
35.造波模式设置为推板式造波法,并分别设置两块造波板的运动属性,进行双向波浪模拟;
36.设置目标规则波的类型、周期、波高以及传播方向。
37.进一步的,步骤s7中,设置计算监测量及数据输出具体为:
38.程序运行求解完成后,输出船体运动、船体受力以及流体质点数据;
39.设置求解目标为船体,输出船体六个自由度位移和速度数据;
40.设置求解目标为船体,输出船体受到的六个力或力矩数据;
41.设置求解目标为流体质点,输出流场中某点的位移、速度、加速度、密度、压力、质量、体积以及涡度数据。
42.进一步的,步骤s8具体为:
43.根据预设工况下计算的船模运动和受力结果,对其时历曲线和统计幅值进行分析;
44.根据一系列工况下计算的船模运动和受力结果,对其随环境参数的变化规律情况进行分析;
45.所述环境参数包括波高、波长、两方向成分波相位差、船模航速以及船模航向。
46.进一步的,步骤s2建立数值水池模型和步骤s3建立船体模型具体采用freecad实现;
47.步骤s4至步骤s7具体采用designsphysics实现。
48.本发明与现有技术相比,具有如下优点和有益效果:
49.1、本发明采用的sph方法是一种无网格方法,可以方便地模拟各种复杂形状的流场变化。该方法尤其适用于模拟高速船舶在复杂恶劣海况下的大幅运动、波浪载荷、砰击和甲板上浪现象,能够够好地捕捉波面破碎、流体粒子飞溅等效果强非线性效应。
50.2、本发明方法克服了现阶段基于sph方法的船舶耐波性预报技术仅能够模拟单向波中的船舶性能的缺陷与不足。本发明利用数值水池中双向波浪的sph数值模拟技术,从而模拟和预报复杂海洋环境中双向波浪作用下的船舶耐波性。
51.3、本发明方法中针对船舶耐波性预报所用的几何建模和数值计算工作都采用开源软件完成,并可根据模拟需要对designsphysics中算法的xml源程序代码进行直接修改和编译,避免了采用商业软件进行船舶耐波性预报的软件购置成本高、无法进行二次开发等缺点。
附图说明
52.图1是本发明的流程图;
53.图2是数值水池模型示意图;
54.图3是船体各站位的横剖线图;
55.图4是船体中纵剖线图;
56.图5是实施例中船模三维模型示意图;
57.图6是实施例中数值水池与船体模型在designsphysics软件中的显示效果图;
58.图7是实施例中随船坐标系的定义;
59.图8是实施例中计算模拟初期的船模周围波浪场分布;
60.图9是实施例中计算模拟后期的船模周围波浪场分布;
61.图10是实施例中船模运动的平动速度分量模拟结果;
62.图11是实施例中船模运动的转动速度分量模拟结果;
63.图12是实施例中船模的受力分量模拟结果;
64.图13是实施例中空间坐标位置为(0,0,
‑
1)一点处流场的速度分量模拟结果;
65.附图标号说明:1
‑
空间限制域;2
‑
数值水池域;3
‑
造波板;4
‑
消波岸;5
‑
粒子填充
域。
具体实施方式
66.下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
67.实施例
68.本实施例中使用开源软件freecad建立数值水池模型和船体模型,并使用开源软件designsphysics模拟流体粒子流动和船体周围的绕流场,从而在数值水池中模拟双向波浪中的船舶运动响应与受力情况。
69.如图1所示,一种基于sph的双向波浪中船舶耐波性预报方法,包括以下步骤:
70.s1、确定船模和数值水池的尺度,根据模拟精度需求和计算效率综合确定船模和数值水池的几何尺度。在本实施例中,包括以下步骤:
71.s11、综合考虑模拟精度需求、尺度效应和计算效率,合理确定船模的几何缩尺比。若模型缩尺比越大,模型越接近实船,则尺度效应越弱、模拟计算精度越高,但所需要的计算资源、时间和成本也越高。反之,若模型缩尺比越小,则尺度效应越明显、模拟计算精度越低,但所需要的计算资源、时间和成本随之降低。本实施例以标准船型s175型集装箱船为例,实船水线长175m,采用缩尺比为1:40的船模进行数值计算,即模型水线长4.375m。
72.s12、根据实船参数和缩尺比确定船模的主要参数。实船参数包括主尺度、几何型线、排水量、重心位置、转动惯量、航速。模型参数的确定需要满足傅汝德数相似准则,使船模满足几何相似、运动相似、动力相似条件。几何相似即模型与实船所对应的一维线性尺度的比值是常数,通常用缩尺比λ表示。如下表1所示,为耐波性试验中的典型物理量的相似换算关系。如下表2所示,为本实施例中所用实船和船模的主要参数。
73.s13、根据船模尺度和波浪参数,合理确定数值水池的尺度。数值水池的尺度确定需要综合折中考虑浅水效应、池壁效应、阻塞效应、波浪传播与反射、粒子数量、计算效率等因素。若数值水池的尺度越大,则浅水效应、池壁效应、阻塞效应越弱,波浪也能更充分地发展与传播、反射波浪的干扰也越弱,但所需要的粒子数量、计算资源、时间和成本也越高。反之,若数值水池的尺度越小,则浅水效应、池壁效应、阻塞效应越明显,波浪的发展与传播受限制、反射波浪的干扰也越明显,但所需要的粒子数量、计算资源、时间和成本也越低。
74.本实施例中选取的数值水池的长宽深分别为20m、20m、2m。
75.[0076][0077]
表1
[0078]
参数实船模型缩尺比1:11:40船长175m4.375m型宽25.4m0.635m吃水9.5m0.238m排水量23712t370.5kg重心纵向位置(距艉柱)85m2.125m重心垂向位置(距基线)8.52m0.213m横摇惯性半径9.64m0.241m纵摇惯性半径42.08m1.052m
[0079]
表2
[0080]
s2、建立数值水池模型,数值水池模型包括空间限制域、数值水池域、两块造波板、两块消波岸以及粒子填充域。在本实施例中,包括以下步骤:
[0081]
使用开源软件freecad建立数值水池模型,数值水池模型包括空间限制域1、数值水池域2、两块造波板3、两块消波岸4以及粒子填充域5。在freecad中选择pre
‑
processing下的new case建立新案例文件,并命名为dsph case。
[0082]
本实施例中建立的数值水池模型的结构单元参数如表3所示。
[0083][0084]
表3
[0085]
本实施例在空间直角坐标系o
‑
xyz中进行数值水池的建模,双向波浪场由沿ox和oy两方向传播的规则波叠加而成,两向规则波的相位差为0。建立数值水池模型的具体过程如下:
[0086]
s21、在新案例文件dsph case根目录下的case limits(3d)模型中设置一个长方体空腔域作为数值模拟的空间限制域1。空间限制域由六个面组成,后续建模及计算的几何模型都应限制在该空间区域范围内部。空间限制域的ox、oy、oz方向的尺度分别为22m、22m、5m。
[0087]
s22、在新案例文件dsph case根目录下新建tank模型并设置为一个长方体空腔域作为数值水池域2,数值水池域由底部边界面、顶部边界面和四个侧壁边界面组成,数值水池域的6个边界面应在空间限制域的内部。数值水池域的ox、oy、oz方向的尺度分别为20.2m、20.2m、4m。
[0088]
s23、在新案例文件dsph case根目录下新建piston1和piston2模型并设置为两块矩形造波板3,两块造波板位于数值水池域内部且相互垂直,造波板布置于两相邻侧壁边界面附近且与各自对应的侧壁边界面平行。造波板的底边位于底部边界面上,顶边位于顶部边界面上或其下方,一侧边与另一块造波板的侧边重合,另一侧边位于侧壁边界面上。造波板为具有一定厚度的体单元,其宽度、高度、厚度分别为20m、3m、0.01m。
[0089]
s24、在新案例文件dsph case根目录下新建beach1和beach2模型并设置为两块矩形消波岸4,两块矩形消波岸位于数值水池域内部且位于两块造波板的对面处,消波岸与水平面之间有倾斜角度。消波岸的底边位于底部边界面上,顶边位于顶部边界面上或其下方,两侧边位于侧壁边界面上。消波岸为具有一定厚度的体单元,其宽度、高度、厚度分别为20m、3m、0.01m,板面与水平面的夹角为30
°
。
[0090]
s25、在新案例文件dsph case根目录下新建fillbox文件夹,在fillbox文件夹下建立filllimit模型,用于设置粒子填充域5,粒子填充域为长方体空间域且位于数值水池域内部,其底面与数值水池域的底部边界面重合,顶面位于静水平面高度处,其中两相邻侧面与两造波板的浸水面重合,剩余两相邻侧面与数值水池域的侧壁边界面重合。粒子填充域的ox、oy、oz方向的尺度分别为20m、20m、2m。
[0091]
基于步骤s2所建立的数值水池模型的几何示意图如图2所示。
[0092]
s3、建立船体模型,创建并导入船体外壳模型。在本实施例中,具体包括以下步骤:
[0093]
s31、本实施例中选取标准船型s175型集装箱船,根据船体型线图和型值表数据采用freecad软件绘制船体各站位的横剖线和中纵剖线图,分别如图3和图4所示。
[0094]
s32、根据典型位置的横剖线和中纵剖线生成曲面,创建船体外壳的三维几何模型,所创建船体外壳的三维几何模型的侧视图和正视图如图5所示。
[0095]
s33、在新案例文件dsph case根目录下导入已创建的船体三维几何模型importedgeo,并选择导入模型的缩放系数为(0.025,0.025,0.025),从而实现船模与实船的缩尺比例为1:40。
[0096]
基于步骤s2和s3所建立的数值水池与船体模型在软件中的显示图如图6所示,其中船模位于数值水池的中心,两块垂直布置的板为造波板,两块倾斜布置的板为消波岸。
[0097]
s4、设置船体的初始状态。在本实施例中,具体包括以下步骤:
[0098]
s41、选择已建立的船体模型importedgeo文件,然后点击float state选项后弹出floating configuration选项窗口,设置船体的漂浮状态为true(可漂浮式)。
[0099]
s42、将船模的重心位置设置为坐标原点,通过平移数值水池使船模位于水池的中心位置,通过在水平面内旋转数值水池从而实现船模的航向角的初始化。
[0100]
s5、设置船体的运动特性。在本实施例中,具体包括以下步骤:
[0101]
在floating properties窗口中设置船体的质量、重心、惯性矩、初始速度、自由度等。本实施例中对应船体模型的质量为370.5kg,重心位置坐标为(0,0,
‑
0.025)。船模绕随船坐标系o
‑
xyz三个坐标轴的转动惯量为(21.519,410.034,410.034)。船体在随船坐标系o
‑
xyz的三个方向的初始线速度、绕三个坐标轴的初始角速度均取默认值0。限制x和y方向的平动位移,释放z方向的平动位移;限制绕z坐标轴的转动,释放绕x和y坐标轴的转动。关于随船坐标系的定义如图7所示。
[0102]
s6、流体粒子填充、设置边界条件和造波模式,对粒子填充域进行水粒子填充与生
成,设置数值水池域边界面、造波板、消波岸、船模以及粒子填充域的类型和生成模式,设置两块造波板的运动类型和目标双向波浪的属性。
[0103]
在本实施例中,具体包括以下步骤:
[0104]
s61、在fillbox文件夹下建立fillpoint模型,对粒子填充域进行水粒子填充与生成。
[0105]
s62、在designsphysics模块中选择define_constants选项,弹出dsph constant definition选项窗口,定义重力加速度、流体密度等参数。本实施例中定义重力加速度为竖直向下9.81m/s2、流体密度1000kg/m3、其余参数选用软件默认值。
[0106]
s63、在designsphysics模块中选择选择execution parameters选项,弹出dsph execution parameters选项窗口,定义粘性类型、粘性系数、模拟时间、步长等。本实施例中计算精度选取双精度、时间积分选取symplectic算法、定义交互核函数选wendland、粘度公式选artificial、阻尼系数取0.01、粘性因子取1、模拟计算时长为45秒、计算步长为0.1秒等。
[0107]
s64、在designsphysics模块中的inter
‑
particle distance输入框中定义粒子间距为0.03m。
[0108]
s65、点击已建立的tank模型从而选中数值水池域,并点击add to dsph simulation选项将其添加到模拟计算中,将数值水池域的六个边界面定义为bound(壁面边界),设置生成模式为face(空腔六面体的表面)。
[0109]
s66、依次点击已建立的piston1和piston2模型从而选中造波板,并点击add to dsph simulation选项将其添加到模拟计算中,设置造波板的类型为bound(壁面边界),设置生成模式为full(实体)。
[0110]
s67、依次点击已建立的beach1和beach2模型从而选中消波岸,并点击add to dsph simulation选项将其添加到模拟计算中,设置消波案的类型为bound(壁面边界),设置生成模式为full(实体)。
[0111]
s68、点击已建立的importedgeo选项从而选中船体模型,并点击add to dsph simulation选项将其添加到模拟计算中,设置船体模型的类型为bound(壁面边界),设置生成模式为face(空腔船体的表面)。
[0112]
s69、点击已建立的fillbox文件夹选项从而选中粒子填充域,设置粒子填充域的类型为fluid(流体)。
[0113]
s610、依次点击已建立的piston1和piston2模型从而分别选中两块造波板,并点击motion选项会弹出motion configuration选项窗口,分别设置两块造波板的运动类型为true(可运动)。
[0114]
s611、在create new下拉选项中选择regular wave generator(piston),从而采用推板式造波法进行规则波模拟,进而在新出现的输入框中设置目标波浪的类型、周期、波高、传播方向等。本实施例中选用2nd order(二阶斯托克斯波)、设置推板水下部分深度为2m,两块造波板对应的波浪传播方向分别为(1,0,0)和(0,1,0)、波高0.12m,波浪周期1.6s。
[0115]
本实施例中所建立的数值水池模型及船体模型中各单元的边界条件如下表4所示。
[0116][0117][0118]
表4
[0119]
s7、程序运行求解、设置计算监测量及数据输出,确认数值模拟的粒子数目,采用软件程序进行数值模拟计算,并设置计算监测量及数据输出,对船体运动、船体受力、船体表面压力、波面高程的监测进行设置并输出结果。在本实施例中,具体包括以下步骤:
[0120]
s71、在程序计算前,在designsphysics模块中选择run gencase后弹出save&gencase对话框,查看并确认数值模拟的粒子总数目。本实施例中共生成粒子4923539个。
[0121]
s72、在designsphysics模块中点击run开始进行数值模拟计算。如图8和图9所示,分别为计算模拟初期波浪传播过程中及后期波浪稳定的典型时刻的船模周围波浪场分布情况。
[0122]
s73、在designsphysics模块中选择post
‑
prossessing进行例如波面高程曲线、船体运动、船体受力、流体质点信息等数据查看及数据输出。
[0123]
s74、对船体六个自由度运动位移和速度进行监测。点击post
‑
processing下的floatinginfo选项,在floatinginfo tool窗口中输入船体的计算编号,再点击export,等待完成后点击ok,即可查看和导出船体六个自由度运动位移和速度。如图10和图11所示,分别为某工况下的船模沿ox、oy、oz方向运动的平动速度和绕ox、oy、oz方向的转动速度随时间变化的模拟结果。
[0124]
s75、对船体受到的六个力或力矩进行监测。点击post
‑
processing下的computeforces选项,在computeforces tool窗口中输入船体的计算编号,再点击export,等待完成后点击ok,测得船体的x、y、z方向以及整体受力。如图12所示,为某工况下的船模沿ox、oy、oz方向的受力情况随时间变化的模拟结果。
[0125]
s76、对流场中某点的位移、速度、加速度、密度、压力、质量、体积和涡度进行监测。点击post
‑
processing下的measuretool选项,在measuretool窗口中勾选all以及calculate water elevation,点击list of points,在measuretool points中输入监测点坐标,等待完成后点击ok,测得监测点的位移、速度、加速度、密度、压力、质量、体积和涡度。如图13所示,为某工况下在水下空间坐标位置为(0,0,
‑
1)一点处流场沿ox、oy、oz方向的速
度分量随时间变化的模拟结果。
[0126]
s8、船舶耐波性分析评估,根据计算结果对船舶在双向波浪中的运动响应和受力进行分析与评估。在本实施例中,具体为:
[0127]
根据某一工况下计算的船模运动和受力结果,对其时历曲线和统计幅值进行分析。例如,对其时历曲线进行频谱分析,读取时历曲线中的最大值和最小值。
[0128]
此外,根据一系列工况下计算的船模运动和受力结果,通过改变波高、波长、两方向成分波相位差、船模航速、船模航向等环境参数,对其随环境参数的变化规律情况进行分析。
[0129]
还需要说明的是,在本说明书中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0130]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其他实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。