1.本发明涉及航空航天技术领域,尤其涉及一种飞行载荷谱编制方法。
背景技术:
2.飞行器的损伤容限、疲劳耐久性既是一种性能,同时也决定了飞机的使用维护成本。进行飞行器的损伤容限、疲劳耐久性设计首先要获得载荷谱,而飞行载荷谱是对飞行器最主要使用情况的抽象体现。目前所采用的载荷谱编制方法十分复杂,技术门槛高,不易于实施,使得无法有效开展飞行器的损伤容限、疲劳耐久性设计和验证工作。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种飞行载荷谱编制方法,该方法易于实施,可应用于所有飞行器的飞行载荷谱编制工作。
4.本发明采用的技术方案如下:
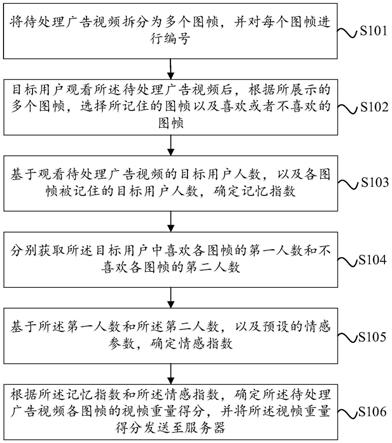
5.本发明所提出的一种飞行载荷谱编制方法,包括以下步骤:
6.步骤s1:飞行器使用情况分析;
7.步骤s2:飞行器载荷分布计算;
8.步骤s3:重心过载数据的编排;
9.步骤s4:载荷谱的导出。
10.进一步的,所述步骤s1的具体过程如下:
11.(1.1)分析飞行器的总体使用情况,确定典型的飞行情况和对应的飞行时间;
12.(1.2)分析由步骤(1.1)得到的典型飞行情况,确定其中每个飞行阶段的飞行时间和相应的飞行器状态参数。
13.进一步的,所述步骤s2的具体过程如下:
14.(2.1)根据步骤(1.2)确定的各飞行阶段飞行器的状态参数,使用cfd方法计算出飞行器各飞行阶段平衡飞行状态下的载荷分布;
15.(2.2)根据步骤(1.2)确定的各飞行阶段飞行器的状态参数,使用cfd方法计算出飞行器各飞行阶段突风或机动过载状态下的载荷分布;
16.(2.3)根据步骤(2.1)和(2.2)的计算结果,导出飞行器各飞行阶段单位过载增量状态下的载荷分布。
17.进一步的,所述步骤s3的具体过程如下:
18.(3.1)根据步骤s1对典型飞行情况的分析,确定飞行器重心过载的累计超越次数数据;
19.(3.2)将步骤(3.1)得到的重心过载数据转化为正、负重心过载增量数据;
20.(3.3)将步骤(3.2)得到的正、负重心过载增量分级;
21.(3.4)将步骤(3.3)得到的不同级重心过载增量按正、负交替出现排列。
22.进一步的,所述步骤s4的具体过程如下:
23.(4.1)根据步骤s2的计算结果,将平衡飞行载荷和单位过载增量载荷线性组合后,得到任意过载状态下的载荷;
24.(4.2)根据步骤(4.1)计算步骤(3.4)排列的重心过载增量所对应的载荷,最终得到飞行载荷谱。
25.本发明与现有技术相比具有以下有益效果:
26.本发明所提出的方法保留了载荷谱编制的基本原则,降低了载荷谱编制的门槛,且无需飞行试验测试,无需机体材料的疲劳性能,低成本,易于实施。
附图说明
27.图1为本发明所提出的一种飞行载荷谱编制方法的流程示意图。
具体实施方式
28.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
29.本发明所提出的一种一种飞行载荷谱编制方法,参见图1,包括如下步骤:
30.步骤s1:飞行器使用情况分析;具体过程如下:
31.(1.1)分析飞行器的总体使用情况,确定典型的飞行情况和对应的飞行时间;
32.以某轻型电动飞机为例,飞机的典型飞行情况有以下两种;
33.典型飞行情况1:一次飞行0.5小时(30min),平均飞行速度170km/h,该情况总飞行时间5000小时(10000次飞行);
34.典型飞行情况2:一次飞行1小时(60min),平均飞行速度185km/h,该情况总飞行时间5000小时(5000次飞行)。
35.则该飞机全寿命周期为10000飞行小时,总计15000次飞行,航程1775000km,平均每次飞行40min,平均飞行速度177.5km/h。
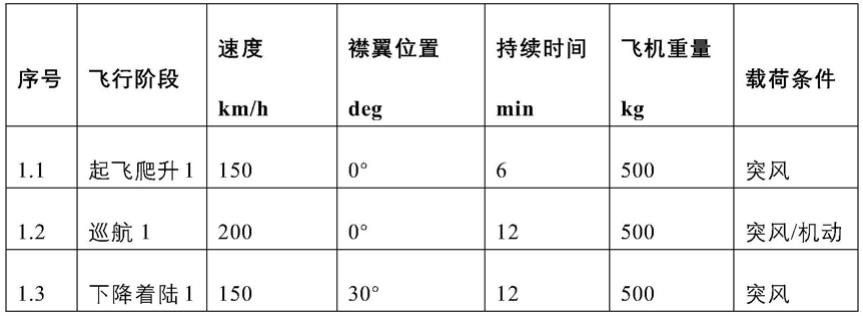
36.(1.2)分析由步骤(1.1)得到的典型飞行情况,确定其中每个飞行阶段的飞行时间和相应的飞行器状态参数;
37.典型飞行情况1的分析如下表。
[0038][0039]
典型飞行情况2的分析如下表。
[0040][0041][0042]
则全寿命周期各飞行阶段飞行小时占比如下表。
[0043]
序号飞行阶段飞行小时占比1.1起飞爬升110%1.2巡航120%1.3下降着陆120%2.1起飞爬升25%2.2巡航235%2.3下降着陆210%
[0044]
步骤s2:飞行器载荷分布计算;具体过程如下:
[0045]
(2.1)根据步骤(1.2)确定的各飞行阶段飞行器的状态参数,并计算出飞行器各飞行阶段平衡飞行状态下的载荷分布;
[0046]
根据(1.2)确定的各飞行阶段飞行器的状态参数,使用cfd方法,计算飞行器各飞行阶段平衡飞行状态下的载荷。以翼根处载荷(弯矩)为例进行说明,计算得到的各飞行阶段平衡飞行状态下翼根弯矩如下表。
[0047][0048]
综合各飞行阶段飞行小时占比得到飞机平均平衡飞行载荷,计算如下
[0049]
f=4000*10% 6000*20% 5000*20% 4000*5% 6000*35% 5000*10%=5400n
·
m
[0050]
(2.2)根据步骤(1.2)确定的各飞行阶段飞行器的状态参数,并计算出飞行器各飞行阶段突风或机动过载状态下的载荷分布;
[0051]
根据(1.2)确定的各飞行阶段飞行器的状态参数,使用cfd方法,计算飞行器各飞行阶段突风或机动过载状态下的载荷。以翼根处载荷(弯矩)为例进行说明,计算得到的各飞行阶段突风状态下翼根弯矩如下表。
1.5
‑
11022.1
‑
1.41012.7
‑
1.8100[0066]
(3.3)将步骤(3.2)得到的正、负重心过载增量分级;
[0067]
将过载增量分成5级,峰值过载增量分级如下表。
[0068]
峰值过载分级过载区间过载增量区间代表过载代表过载增量每级出现次数p11.3至1.90.3至0.91.60.6104‑
103p21.9至2.50.9至1.52.21.2103‑
102p32.5至3.11.5至2.12.81.8102‑
101p43.1至3.72.1至2.73.42.4101‑
100p53.7以上2.7以上3.72.7100[0069]
谷值过载增量分级如下表。
[0070]
谷值过载分级过载区间过载增量区间代表过载代表过载增量每级出现次数v10.8至0.4
‑
0.2至
‑
0.60.6
‑
0.4104‑
103v20.4至0
‑
0.6至
‑
10.2
‑
0.8103‑
102v30至
‑
0.4
‑
1至
‑
1.4
‑
0.2
‑
1.2102‑
101v4
‑
0.4至
‑
0.8
‑
1.4至
‑
1.8
‑
0.6
‑
1.6101‑
100v5
‑
0.8以下
‑
1.8以下
‑
0.8
‑
1.8100[0071]
(3.4)将步骤(3.3)得到的不同级重心过载增量按正、负交替出现排列;
[0072]
对共计10000个分级载荷随机排序,以峰值为例,序列如下
[0073]
[p1 p1
ꢀ…ꢀ
p3 p1
ꢀ…ꢀ
p1 p4
ꢀ…ꢀ
p2 p1
ꢀ…
]
[0074]
则对应的谷值为
[0075]
[v1 v1
ꢀ…ꢀ
v3 v1
ꢀ…ꢀ
v1 v4
ꢀ…ꢀ
v2 v1
ꢀ…
]
[0076]
步骤s4:载荷谱的导出;具体过程如下:
[0077]
(4.1)根据步骤s2的计算结果,将平衡飞行载荷和单位过载增量载荷线性组合后,得到任意过载状态下的载荷;
[0078]
以翼根突风载荷(弯矩)为例,其对应于各载荷级的载荷如下表。
[0079][0080][0081]
(4.2)根据步骤(4.1)计算步骤(3.4)排列的重心过载增量所对应的载荷,最终得到飞行载荷谱。
[0082]
以步骤(3.4)的载荷级序列为基础,以翼根突风载荷(弯矩)为例,对应的峰值载荷可表示如下(单位n
·
m)
[0083]
[8640 8640
ꢀ…ꢀ
15120 8640
ꢀ…ꢀ
8640 18360
ꢀ…ꢀ
11880 8640
ꢀ…
]
[0084]
对应的谷值载荷如下
[0085]
[3240 3240
ꢀ…ꢀ‑
1080 3240
ꢀ…ꢀ
3240
ꢀ‑
3240
ꢀ…ꢀ
1080 3240
ꢀ…
]
[0086]
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。