技术特征:
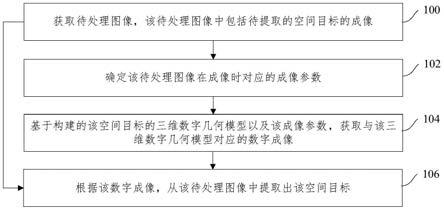
1.一种结合特征点和锚框共同预测和回归的目标检测算法,其特征在于,具体步骤如下:步骤1.获取并处理数据集,具体过程为:(1.1)使用目标检测数据集mscoco,构建对应的图像信息标签,组成图像
‑
目标标签样本对;(1.2)利用图像增强对输入图片进行预处理,以扩充数据集和增加样本的随机性;步骤2.根据算法搭建目标检测神经网络,分为特征提取模块、特征融合模块、关键点预测分支和锚框预测分支四个部分;其中:特征提取模块用于提取图像上的目标特征,由多个残差模块构成,根据网络的大小需求更改残差模块的数量;特征融合模块分两次进行融合,第一次对深层特征进行递归上采样与浅层特征融合,第二次对第一次融合后的浅层特征进行递归下采样与深层特征融合;关键点检测分支利用第一次特征融合后的特征进行关键点检测,预测输出锚框并对其进行前景背景分类;锚框检测分支利用关键点检测分支输出的锚框进行检测,以得到最终的检测结果;步骤3. 训练检测神经网络,利用步骤1得到的训练集和步骤2搭建好的网络来训练模型,通过梯度反向传播算法更新参数,直至网络收敛;步骤4.测试阶段,把待检测图像输入训练好的网络,即可输出图像包含的目标信息。2.根据权利要求1所述的目标检测算法,其特征在于,步骤(2)中:所述关键点检测分支由4个卷积层构成,前三个卷积层每个都有256个卷积核,最后一个卷积层有5个卷积核,即关键点检测分支输出通道数为5,第一个通道代表该目标为前景的概率,第2到5个通道代表目标的中心点坐标(x,y)和长宽(w,h);所述锚框检测分支由4个卷积层构成,前三个卷积层每个都有256个卷积核,最后一个卷积层有(c 4)个卷积核,c表示训练集的目标总类别数,第1到第c个通道表示目标分别为该种类的概率,最后4个坐标表示中心点坐标和长宽相对于锚框的偏移值。3.根据权利要求2所述的目标检测算法,其特征在于,步骤(3)中所述训练目标检测网络,具体步骤如下:(3.1)初始化网络参数,特征提取模块采用在imagenet上预训练好的分类网络模型的参数初始化,其余部分采用kaiming初始化;(3.2)学习率初始化为0.01,每当训练时的损失函数值不在下降时,学习率降低为之前的十分之一;(3.3) 将训练集图片输入网络训练,关键点检测分支得到预测的锚框;锚框预测分支根据预测的相对偏移量得到最终的目标坐标框;(3.4)分别对关键点检测分支输出的锚框和锚框预测分支输出的目标坐标框与真实框求损失,损失函数采用giou,并且同时求分类损失,损失函数采用focal loss;然后通过梯度反向传播算法对网络参数进行优化更新,网络训练的优化器选择sgd,其中参数设置为momentum=0.9;(3.5)重复上述步骤3.3
‑
3.4,在训练集上迭代24个epoch,网络收敛,得到训练好的模型。
4.根据权利要求3所述的目标检测算法,其特征在于,步骤(4)中所述测试阶段的流程为,将待检测的图片输入到训练好的网络中,关键点检测分支得到预测的锚框坐标和其对应为前景的概率p1;锚框检测分支得到相对于锚框的偏移量和其对应为某一具体目标种类的概率p2;最终根据锚框坐标和偏移量计算得到最终的目标坐标信息,并且将概率p1*p2作为该目标的真实概率值。
技术总结
本发明属于计算机视觉领域,具体为一种结合特征点和锚框共同预测和回归的目标检测算法。本发明算法步骤包括:获取目标检测数据集,经处理得到图像/目标标签信息样本对;对训练集进行预处理,利用数据增强来扩充数据集;搭建目标检测网络,包括特征提取模块、特征融合模块、特征点检测分支和锚框检测分支;训练网络模型;把待检测图片输入检测网络即获得目标种类和位置信息。本算法利用特征点检测分支,通过关键点来获得更加精准的先验锚框,克服了手工设计锚框参数的缺点,可获得更加精准的检测结果,并且可以迁移到其他不同的检测任务中。中。
技术研发人员:周益 荆明娥 范益波 曾晓洋
受保护的技术使用者:复旦大学
技术研发日:2021.07.29
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。