技术特征:
1.一种扰动应力
‑
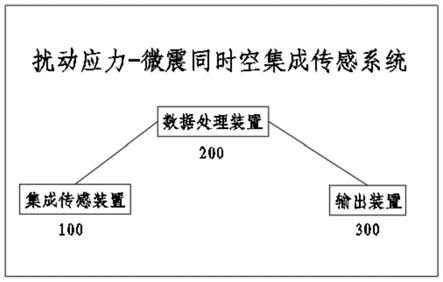
微震同时空集成传感系统,包括输出装置(300),其特征在于,还包括集成传感装置(100)和数据处理装置(200),集成传感装置(100),用于获得微震数据和应力数据,并将微震数据和应力数据发送给数据处理装置(200),数据处理装置(200),用于对微震数据和应力数据进行处理获得微震信号数据和扰动应力数据,微震信号数据包括波形传播速度v、最大振幅a
max
、主频f、振动加速度a、以及p
‑
s波到时差t
d
,扰动应力数据包括实测扰动应力σ
i
,还用于根据微震信号数据通过扰动应力
‑
微震同时空集成传感模型计算获得计算扰动应力σ
′
i
,还用于将微震信号数据、实测扰动应力σ
i
、微震信号类型、以及计算扰动应力σ
′
i
输送至外部输出装置(300)。2.一种扰动应力
‑
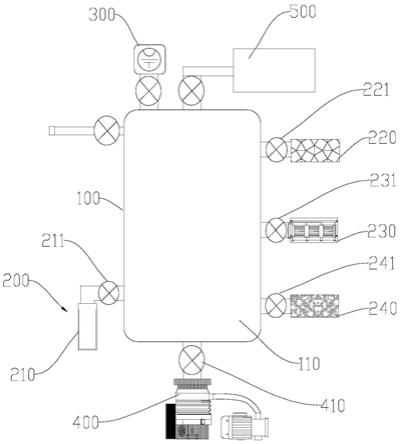
微震同时空集成传感方法,其特征在于,包括以下步骤:步骤1、在巷道围岩内钻孔,然后将集成传感装置(100)推送安装在钻孔测量点处,集成传感装置(100)通过数据线与钻孔外的数据处理装置(200)相连,对钻孔进行注浆,注浆完成后进行钻孔封口,步骤2、集成传感装置(100)对微震数据和应力数据进行实时监测,通过数据线将微震数据和应力数据传输至数据处理装置(200),步骤3、数据处理装置(200)对接收到的微震数据和应力数据进行计算处理与信号识别,获得微震信号数据、扰动应力数据、以及微震信号类型,微震信号数据包括波形传播速度v、最大振幅a
max
、主频f、振动加速度a、以及p
‑
s波到时差t
d
;扰动应力数据包括实测扰动应力σ
i
;微震信号类型包括岩石破裂信号、爆破信号、以及钻机信号,步骤4、对扰动应力
‑
微震同时空集成传感模型进行训练,将微震信号数据输入到训练完成的扰动应力
‑
微震同时空集成传感模型,步骤5、经过扰动应力
‑
微震同时空集成传感模型计算输出计算扰动应力σ
′
i
,步骤6、数据处理装置(200)传输微震信号数据、实测扰动应力σ
i
、微震信号类型、以及计算扰动应力σ
′
i
至外部输出装置(300),若实测扰动应力σ
i
与计算扰动应力σ
′
i
的差值超过设定阈值时,则进行报警。3.根据权利要求2所述的一种扰动应力
‑
微震同时空集成传感方法,其特征在于,所述的步骤4包括以下步骤:步骤4.1、选用bp神经网络作为扰动应力
‑
微震同时空集成传感模型,初始化扰动应力
‑
微震同时空集成传感模型,步骤4.2、获取不同微震信号类型对应的微震信号数据和实测扰动应力σ
i
,微震信号数据包括波形传播速度v、最大振幅a
max
、主频f、振动加速度a、以及p
‑
s波到时差t
d
,一组微震信号数据和对应的实测扰动应力σ
i
作为样本,多个样本构成样本集,将样本集分为训练集和验证集,步骤4.3、扰动应力
‑
微震同时空集成传感模型包含输入层、隐含层与输出层,输入节点数初始为5,输出节点数初始为1,微震信号数据的波形传播速度v、最大振幅a
max
、主频f、振动加速度a、p
‑
s波到时差t
d
作为输入层的输入,微震信号数据对应的实测扰动应力σ
i
作为输出层的输出,步骤4.4、训练之前对扰动应力
‑
微震同时空集成传感模型的训练参数进行设置,训练参数包括最大学习次数、训练结果的间隔步数、允许时长、学习率、动量系数、以及误差极
限,步骤4.5、训练参数设置完成后,利用训练集对扰动应力
‑
微震同时空集成传感模型进行训练,经过多次迭代训练,扰动应力
‑
微震同时空集成传感模型输出的计算扰动应力σ
′
i
的总误差小于预先设置的第一误差指标值,进入步骤4.6,步骤4.6、选择验证集对训练好的扰动应力
‑
微震同时空集成传感模型进行验证,如果根据验证集的微震信号数据获得的计算扰动应力σ
′
i
与验证集的微震信号数据对应的实测扰动应力σ
i
的总误差小于预先设置的第二误差指标值,则扰动应力
‑
微震同时空集成传感模型训练完成;否则,增加样本集中的样本,返回步骤3。
技术总结
本发明公开了一种扰动应力
技术研发人员:陈炳瑞 王庆 彭剑平 李邵军 汪宗文 张博超
受保护的技术使用者:招金矿业股份有限公司
技术研发日:2021.08.20
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。