技术特征:
1.基于非死锁合同网算法的多机分布式时序任务分配方法,其特征在于:包括如下步骤,步骤一:以最小化无人机任务执行时长总和与整体任务完成时间为优化目标,考虑任务时序约束,建立多无人机时序任务分配模型;步骤二:在合同网算法任务排序过程中充分考虑耦合时序任务影响,优先选择最近邻任务,结合用于消除不可行排序方案的死锁判据递归回溯,并对招标无人机选取机制与算法收敛条件改进,形成基于竞争机制的非死锁合同网(df
‑
cnp)算法;在分布式架构下并行非死锁合同网(df
‑
cnp)算法,高效率输出多无人机非死锁时序任务分配结果,在合同网任务排序过程中结合死锁判据避免任务时序死锁,通过改进招标无人机选取机制与算法收敛条件进一步扩展可行解空间,提升多无人机时序任务分配结果最优性。2.如权利要求1所述的基于非死锁合同网算法的多机分布式时序任务分配方法,其特征在于:还包括步骤三,根据步骤二输出的多无人机非死锁时序任务分配结果,多无人机执行相应侦察、打击、评估时序任务,有效缩短多无人机任务执行时长总和与整体任务完成时间。3.如权利要求2所述的基于非死锁合同网算法的多机分布式时序任务分配方法,其特征在于:所述执行相应侦察、打击、评估时序任务中侦察、打击、评估任务能够根据实际任务需要删减或拓展任务类别。4.如权利要求1、2或3所述的基于非死锁合同网算法的多机分布式时序任务分配方法,其特征在于:步骤一实现方法为,考虑w个目标,目标表示为o={o1,o2,
…
,o
w
};多无人机需对每个目标依次执行侦察、打击、评估任务,任务集表示为t={t1,t2,
…
,t
n
},记任务数量为n=t,则n=3w;考虑存在k架异构无人机,表示为u={u1,u2,
…
,u
k
},具体分为战斗型、侦察型和打击型无人机;战斗型无人机能够执行t中的全部任务,侦察型无人机能够执行侦察、评估任务,打击型无人机仅执行打击任务;各任务仅由单架无人机执行,且每一个目标的任务时序为侦察
→
打击
→
评估;考虑任务执行过程中减小系统整体任务代价与均衡各机代价,以最小化无人机任务执行时长总和与整体任务完成时间为优化目标,构建多无人机时序任务分配模型如下人机时序任务分配模型如下x
i,n
∈{0,1}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)式(1)中,α、β为权重系数;x
i,n
是二元变量,当任务t
n
分配给无人机u
i
时,x
i,n
=1,反之为0;c
i,n
为无人机u
i
完成任务t
n
的时长,表示为其中,表示无人机u
i
从任务点t
m
抵近至任务点t
n
的时长,表示u
i
抵达任务点t
n
后的等待时长,表示任务t
n
的执行时长。式(4)中,表示目标o
w
上的任务x,x∈{r,a,v};t
str
(
·
)表示任务开始执行的时刻,t
end
(
·
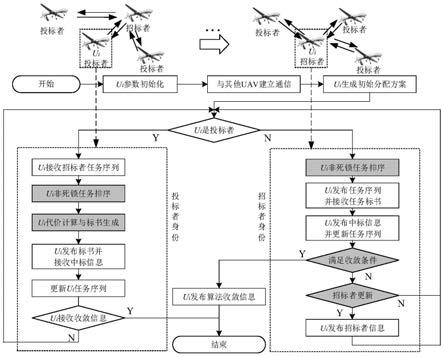
)为任务执行结束时刻。5.如权利要求4所述的基于非死锁合同网算法的多机分布式时序任务分配方法,其特征在于:所述的招标者无人机选取机制改进为:所有无人机均按无人机编号顺序担任招标者无人机;所述算法收敛条件改进为:所有无人机均担任招标者无人机后,且算法代价不再降低,则满足算法收敛条件。6.如权利要求5所述的基于非死锁合同网算法的多机分布式时序任务分配方法,其特征在于:步骤二实现方法为,步骤2.1:无人机u
i
参数初始化;所述无人机u
i
参数具体包括无人机u
i
基本参数信息、招标者编号、目标位置、他机编号与类型;所述无人机u
i
基本参数信息包括初始位置、最小转弯半径;步骤2.2:无人机u
i
身份判断;每轮协商开始前,无人机u
i
对自身身份进行判断,若无人机u
i
当前身份是投标者无人机,转入步骤2.6,等待招标者无人机发布任务序列;反之,当前身份是招标者无人机,执行步骤2.3;步骤2.3:招标者无人机u
i
向全体投标者无人机发布持有任务序列与剩余任务序列;所述持有任务序列具体为无人机u
i
当前待执行任务序列,剩余任务序列是指无人机u
i
依次卖出各任务后的剩余任务序列;步骤2.4:招标者无人机u
i
发布中标信息;无人机u
i
接收全部投标者无人机发布的标书及对应投标任务,从中选取标书值最大的无人机作为中标者,并向全部投标者无人机公布中标信息;将卖出投标任务后的剩余任务序列作为更新后的任务排序方案;步骤2.5:通过招标者无人机更新策略判断是否满足招标者无人机更新与算法收敛条件;若满足招标者无人机更新条件,则招标者无人机编号向后顺延,同时向全部投标者无人机公布招标者无人机更新信息;返回步骤2.2;若满足收敛条件,则无人机u
i
向所有投标无人机发布算法收敛信息,终止非死锁合同网(df
‑
cnp)算法,此时各无人机生成的任务分配结果即为满足时序约束的多无人机可行分配方案;所述招标者无人机更新策略为:当多轮协商后的系统代价无法降低,且仍存在无人机未担任招标者无人机,见式(6),则招标者无人机身份按编号顺移至后续无人机;其中,r表示第r轮交易,τ为收敛指定迭代次数,z
auc
为招标者编号,k为无人机数量;所述算法收敛条件为:若多次协商后系统代价无法降低,且此时全部无人机均已担任过招标者无人机,则算法收敛退出;步骤2.6:若无人机u
i
身份判断为投标者无人机,接收招标者无人机发布信息后,无人机u
i
与其他投标者无人机并行开展标书计算,选择招标者无人机持有任务纳入自身任务序列,通过非死锁排序算法完成非死锁排序;依据排序结果与招标者无人机剩余任务序列通过代价计算方法进行代价计算,选择最小化整体代价的任务进行投标,并向投标者无人机
发布标书及对应投标任务;所述非死锁排序算法具体为:将无人机u
i
持有任务视作多个节点,构建当前节点的邻近任务集合依据预估代价矩阵l
i
选择距离最近的节点j*加入无人机u
i
任务序列s
i
,标记节点j*为已访问节点,直至非死锁排序算法当前搜索深度d与无人机u
i
持有的任务数量n
i
相同;根据s
i
构建任务时序有向图h,并依据死锁判据进行s
i
死锁检测;若任务序列s
i
非死锁,且搜索次数λ小于等于预设阈值则非死锁排序算法获得一组可行排序方案,非死锁排序算法结束;若则非死锁排序算法递归退出;若任务序列s
i
死锁,则从任务序列s
i
中移除最近邻节点j*,重置j*为未访问节点,选择剩余最邻近节点继续排序过程;若无邻近节点,则递归回溯至任务序列中前一节点继续排序过程,直至非死锁排序算法结束或退出;所述预估代价矩阵l
i
计算方式为:计算方式为:其中,无人机u
i
当前任务集为q
i
,表示无人机u
i
从任务t
m
到t
n
的预估抵近代价,使用任务间欧式距离进行预估;0)为执行任务t
n
前的预估等待代价,表示无人机u
i
开始执行任务t
n
的预估时刻,表示无人机u
i
结束执行任务t
m
的预估时刻;表示任务t
n
的执行时长;所述死锁判据为:若id(h)为0或od(h)为0,只要任务调整后h无环,即满足全局任务非死锁;若id(h)和od(h)均不为0,只要任务调整后h无环,且h不产生新的边界可达对,即能够保证全局任务非死锁;其中,任务调整是指无人机u
i
选择招标者持有任务纳入自身任务序列的过程;指向h的有向边为h的入弧,其数量为h的入度,记为id(h);由h指出的有向边为h的出弧,其数量为h的出度,记为od(h);所述代价计算方法为:协商前后整体代价变化由式(8)计算其中,招标者无人机u
i
、投标者无人机u
j
持有任务序列分别为s
i
、s
j
,任务集为q
i
、q
j
,持有任务数量为n
i
、n
j
;无人机u
j
从s
i
中买入任务t
m
加入自身序列s
j
,通过非死锁排序,无人机u
j
任务序列变为对应无人机u
i
剩余任务序列为剩余任务序列为表示无人机u
i
执行任务序列s
i
的代价,α、β为式(1)中的权重系数,s
i,n
表示任务序列s
i
中第n个任务,表示任
务序列s
i
中各任务代价累加;包含三部分代价:抵近时长代价、等待时长代价和执行时长代价,由式(5)计算;所述标书生成方法为:无人机u
j
依次对s
i
中的所有任务计算协商前后的整体代价变化,从中选取最小化整体代价的任务作为投标任务,并发布标书值bid
j,i
为整体代价变化的最大值;大值;步骤2.7:投标者无人机u
i
判断是否中标;无人机u
i
若接收到中标信息则更新自身任务序列;若未中标,则保持原有任务序列;步骤2.8:若投标者无人机u
i
收到算法收敛信息,则终止非死锁合同网(df
‑
cnp)算法,无人机u
i
按当前分配结果执行任务;若收到招标者更新信息,则招标者无人机编号向后顺延;返回步骤2.2。
技术总结
本发明公开的基于非死锁合同网算法的多机分布式时序任务分配方法,属于任务分配技术领域。本发明实现方法为:针对多无人机协同任务分配的时序约束问题,建立时序任务分配模型,并提出时序任务死锁判据;在合同网算法任务排序过程中充分考虑耦合时序任务影响,优先选择最近邻任务,结合用于消除不可行排序方案的死锁判据递归回溯,生成满足死锁约束的任务排序方案,并对招标无人机选取机制与算法收敛条件改进,进而提出一种基于竞争机制的非死锁合同网(DF
技术研发人员:龙腾 曹严 孙景亮 王仰杰 徐广通
受保护的技术使用者:北京理工大学
技术研发日:2021.07.29
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。