技术特征:
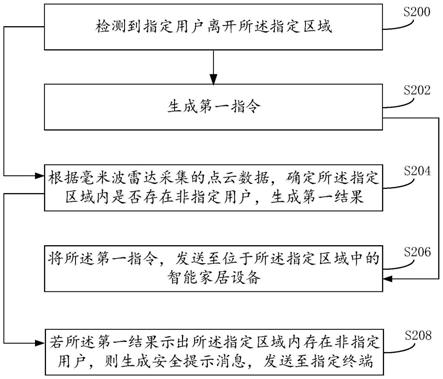
1.一种智能家居设备控制方法,其特征在于,所述方法包括:若检测到指定用户离开所述指定区域,则生成第一指令,并且,根据毫米波雷达采集的点云数据,确定所述指定区域内是否存在非指定用户,生成非指定用户检测结果;将所述第一指令,发送至位于所述指定区域中的智能家居设备,使得接收到所述第一指令的智能家居设备,将其自身的工作状态,调整为第一状态,所述智能家居设备处于第一状态时的工作效率,低于其处于第二状态时的工作效率,并且,若所述非指定用户检测结果示出所述指定区域内存在非指定用户,则生成安全提示消息,发送至指定终端。2.根据权利要求1所述的方法,其特征在于,生成第一指令,包括:根据所述毫米波雷达采集的点云数据,识别出位于所述指定区域中的智能家居设备的类别,针对识别出的每个类别,生成该类别的智能家居设备对应的第一指令,作为该类别的第一目标指令;将所述第一指令,发送至位于所述指定区域中的智能家居设备,包括:针对生成的每个第一目标指令,将所述第一目标指定发送至所述第一目标指令对应的类别的智能家居设备。3.根据权利要求2所述的方法,其特征在于,根据所述毫米波雷达采集的点云数据,识别出位于所述指定区域中的智能家居设备的类别包括:根据毫米波雷达采集的点云数据、和所述点云数据表示出的时频信息,确定所述指定区域内的各物体的以下特征之一,作为目标特征:多普勒偏移量、多普勒躯干带宽、多普勒质心、多普勒速度、多普勒总带宽、速度标准差、角度标准差、距离标准差、帧均值、帧标准差、点云分布面积的均值、点云分布面积的标准差、相对移动距离平均差的标准差;将所述目标特征,输入分类模型,得到所述分类模型输出的各物体所属的智能家居设备的类别。4.根据权利要求3所述的方法,其特征在于,所述方法包括以下至少一项:所述分类模型是支持向量机;所述多普勒偏移量是采用公式一得到的:offset=mean(high)
‑
mean(low)
ꢀꢀꢀꢀꢀꢀꢀ
(公式一)式中,offset是多普勒偏移量,mean(high)是高频包络线的均值,mean(low)是低频包络线的均值;多普勒躯干带宽是采用公式二得到的:torso bandwise=min(high)
‑
max(low)
ꢀꢀꢀꢀꢀꢀ
(公式二)式中,torso bandwise是多普勒躯干带宽,min(high)是高频包络线的最小频率值,max(low)是低频包络线得最大频率值;多普勒质心是采用公式三和公式四得到的:多普勒质心是采用公式三和公式四得到的:式中,meanest是多普勒质心,m是一帧点云数据中的点的数量,snr
i
是第i个点的信噪
比,doppler
i
是第i个点的多普勒速度,n是一个指定周期内采集的点云数据的帧的数量;多普勒总带宽是采用公式五得到的:bandwise=max(high)
‑
min(low)
ꢀꢀꢀꢀꢀꢀꢀ
(公式五)式中,bandwise是多普勒总带宽,max(high)是高频包络线的最大频率,min(low)是低频包络线的最小频率值;帧均值是采用公式六至公式十一得到的:acc_range=range1*snr1 range2*snr2
…
range
m
*snr
m
ꢀꢀꢀꢀ
(公式六)acc_angle=angle1*snr1 angle2*snr2
…
angle
m
*snr
m
ꢀꢀꢀꢀ
(公式七)acc_doppler=doppler1*snr1 doppler2*snr2
…
doppler
m
*snr
m
ꢀꢀꢀꢀ
(公式八)acc_snr=snr1 snr2
…
snr
m
ꢀꢀꢀꢀ
(公式九)(公式九)式中,mean_rad是帧均值,w1、w2和w3是预设的权重;range
i
是第i个点对应的物体在指定周期内的移动距离,range
i
是第i个点的角度;帧标准差是采用公式六至公式十、和公式十二得到的:式中,std_rad是帧标准差;相对移动距离平均差的标准差是采用公式十三至公式十六得到的:相对移动距离平均差的标准差是采用公式十三至公式十六得到的:相对移动距离平均差的标准差是采用公式十三至公式十六得到的:相对移动距离平均差的标准差是采用公式十三至公式十六得到的:式中,std_md_range是相对移动距离平均差的标准差。5.根据权利要求1所述的方法,其特征在于,若检测到指定用户离开指定区域,则生成第一指令之后,所述方法还包括:若检测到所述指定用户进入所述指定区域,则生成第二指令;将所述第二指令,发送至位于所述指定区域中的智能家居设备,使得接收到所述第一指令的智能家居设备,将其自身的工作状态,调整为第二状态。
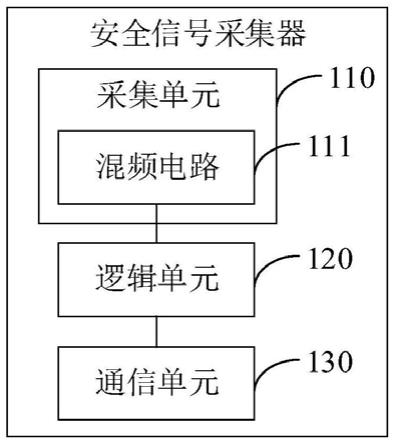
6.根据权利要求1所述的方法,其特征在于,生成非指定用户检测结果之后,所述方法还包括:对所述毫米波雷达采集的点云数据进行处理,得到所述非指定用户在所述指定区域内的移动轨迹;存储所述移动轨迹,和/或,将所述移动轨迹发送至所述指定终端。7.根据权利要求6所述的方法,其特征在于,对所述毫米波雷达采集的点云数据进行处理,得到所述非指定用户在所述指定区域内的移动轨迹,包括:根据毫米波雷达采集的点云数据、和所述点云数据表示出的时频信息,确定所述指定区域内的各物体的以下特征之一,作为目标特征:多普勒偏移量、多普勒躯干带宽、多普勒质心、多普勒速度、多普勒总带宽、速度标准差、角度标准差、距离标准差、帧均值、帧标准差、点云分布面积的均值、点云分布面积的标准差、相对移动距离平均差的标准差;采用跟踪算法对所述目标特征进行处理,得到所述非指定用户在所述指定区域内的移动轨迹。8.一种智能家居设备控制装置,其特征在于,所述装置包括:指定用户检测模块,配置为若检测到指定用户离开所述指定区域,则生成第一指令;非指定用户检测结果生成模块,配置为根据毫米波雷达采集的点云数据,确定所述指定区域内是否存在非指定用户,生成非指定用户检测结果;第一指令发送模块,配置为发送至位于所述指定区域中的智能家居设备,使得接收到所述第一指令的智能家居设备,将其自身的工作状态,调整为第一状态,所述智能家居设备处于第一状态时的工作效率,低于其处于第二状态时的工作效率;安全提示消息发送模块,配置为若所述非指定用户检测结果示出所述指定区域内存在非指定用户,则生成安全提示消息,发送至指定终端。9.一种电子设备,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序时,实现权利要求1
‑
7任一项所述的智能家居设备控制方法的步骤。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1
‑
7任一项所述的智能家居设备控制方法的步骤。
技术总结
本申请涉及一种智能家居设备控制方法及装置,若检测到指定用户离开指定区域,则生成第一指令,并且,根据毫米波雷达采集的点云数据,确定指定区域内是否存在非指定用户,生成非指定用户检测结果;将第一指令,发送至位于指定区域中的智能家居设备,使得接收到第一指令的智能家居设备,将其自身的工作状态,调整为第一状态,智能家居设备处于第一状态时的工作效率,低于其处于第二状态时的工作效率,并且,若非指定用户检测结果示出指定区域内存在非指定用户,则生成安全提示消息,发送至指定终端。本说明书中的方法能够减轻用户对智能家居设备的控制负担,并有利于保障指定区域的财产安全。产安全。产安全。
技术研发人员:陈向文 宋德超 陈翀 罗晓宇 刘逸伦 孙聪
受保护的技术使用者:珠海联云科技有限公司
技术研发日:2021.09.03
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。